You might also like
- Adapt PT Training Manual PDFDocument22 pagesAdapt PT Training Manual PDFbvm013_502268804No ratings yet
- ACI 318-19 Equivalencias de EcuacionesDocument9 pagesACI 318-19 Equivalencias de EcuacionesLeonel SanchezNo ratings yet
- Sony DSC-H1 Service ManualDocument52 pagesSony DSC-H1 Service ManualVlad PANAITNo ratings yet
- Digsi Cable SpecDocument27 pagesDigsi Cable SpecAnonymous GWzokyNPZ7100% (1)
- Traffic Lights Beginner Arduino ProjectDocument10 pagesTraffic Lights Beginner Arduino ProjectPrasad PawaskarNo ratings yet
- ABB RED 615 ManualDocument68 pagesABB RED 615 Manual2008shivaniNo ratings yet
- Mini Audio AmplifierDocument32 pagesMini Audio AmplifierSanjivee Sachin83% (6)
- 2-Equation For Stress-Strain Curve (Desayi, Et Al., 1978) PDFDocument7 pages2-Equation For Stress-Strain Curve (Desayi, Et Al., 1978) PDFJhe TaguinesNo ratings yet
- Rectangular Concrete Tanks IS003Document16 pagesRectangular Concrete Tanks IS003sourabhiet100% (1)
- Strut and Tie PierDocument7 pagesStrut and Tie PierYisus NuñezNo ratings yet
- 08 2energy DeflectionDocument102 pages08 2energy DeflectionVannurSwamyNo ratings yet
- In Plane Arch Buckling of Network Arch BridgesDocument10 pagesIn Plane Arch Buckling of Network Arch BridgesAlin SalageanNo ratings yet
- Fast Check For Block ShearDocument7 pagesFast Check For Block ShearSergioAlcantaraNo ratings yet
- Concrete Detailing 1127-3f 289Document1 pageConcrete Detailing 1127-3f 289bagmassNo ratings yet
- Israel StandardDocument15 pagesIsrael StandardDũng Bùi Đức100% (1)
- Finite Element Applications in Geotechnical Engineering: H. Ercan TaşanDocument25 pagesFinite Element Applications in Geotechnical Engineering: H. Ercan TaşanhasanNo ratings yet
- Postensioning TIANJINDocument25 pagesPostensioning TIANJINViviana Sofia100% (1)
- Reinforcement Design of A Pile CapDocument45 pagesReinforcement Design of A Pile CapBogdanBNo ratings yet
- Strut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDocument16 pagesStrut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDavid Apaza QuispeNo ratings yet
- Moment Redistribution - Principles and Practice Using Aci 318-02Document19 pagesMoment Redistribution - Principles and Practice Using Aci 318-02aladinsaneNo ratings yet
- Cyclic Behavior and Seismic Design of Bolted Flange Plate Steel Moment ConnectionsDocument12 pagesCyclic Behavior and Seismic Design of Bolted Flange Plate Steel Moment ConnectionsJoaquin PalermoNo ratings yet
- PLAXIS-UDSM-Masonry Model (V20Update1)Document22 pagesPLAXIS-UDSM-Masonry Model (V20Update1)NISHANT ROYNo ratings yet
- Staged Construction - Technical Knowledge Base - Computers and Structures, Inc. - Technical Knowledge BaseDocument2 pagesStaged Construction - Technical Knowledge Base - Computers and Structures, Inc. - Technical Knowledge BaseAhmed AlyNo ratings yet
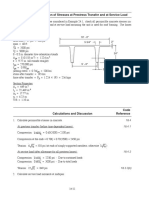
- Example 24.2-Investigation of Stresses at Prestress Transfer and at Service LoadDocument3 pagesExample 24.2-Investigation of Stresses at Prestress Transfer and at Service LoadMario Antonio Gomez CruzNo ratings yet
- BECHTEL - Block Foundations For Rotating EquipmentDocument64 pagesBECHTEL - Block Foundations For Rotating EquipmentPatricioNo ratings yet
- Sap 2000Document3 pagesSap 2000khairulakbarNo ratings yet
- Convencion de Signos Sap2000Document6 pagesConvencion de Signos Sap2000Jesus SilvaNo ratings yet
- MVFOSMDocument5 pagesMVFOSMNabil MuhammadNo ratings yet
- Table 7.21.1 (Revised)Document5 pagesTable 7.21.1 (Revised)ariesNo ratings yet
- Homework On Dynamics of StrucutresDocument2 pagesHomework On Dynamics of StrucutresShahidul Islam ShahariarNo ratings yet
- Understanding ANSYS Workbench Via Eccentric ColumnDocument5 pagesUnderstanding ANSYS Workbench Via Eccentric ColumnKelvin ChungyNo ratings yet
- 4 - 4 Diseño de Zapatas ClaseDocument5 pages4 - 4 Diseño de Zapatas ClaseNicolas NuñezNo ratings yet
- Dereje GudetaDocument174 pagesDereje GudetaBIRUK FEKADUNo ratings yet
- Course Handout BridgeDocument3 pagesCourse Handout BridgenishantNo ratings yet
- ETABS 2016 Concrete Frame Design: ACI 318-14 Column Section DesignDocument2 pagesETABS 2016 Concrete Frame Design: ACI 318-14 Column Section DesignhedayatullahNo ratings yet
- Conjugate Beam METHODDocument13 pagesConjugate Beam METHODAdam Ahmed100% (1)
- Sigmafast 278Document4 pagesSigmafast 278MekhmanNo ratings yet
- Geotech2 Assign1Document10 pagesGeotech2 Assign1Michael Racelis50% (2)
- Structural Calculations For Steel FrameDocument2 pagesStructural Calculations For Steel Framejay_senjaliaNo ratings yet
- Summary of AASHTO LRFD Seismic Column DesignDocument6 pagesSummary of AASHTO LRFD Seismic Column Designzimm0259No ratings yet
- Modification of The ACI Rectangular Stress Block For High-Strength ConcreteDocument9 pagesModification of The ACI Rectangular Stress Block For High-Strength ConcretepicottNo ratings yet
- Hazus MH Mr1Document119 pagesHazus MH Mr1weihuanNo ratings yet
- 3 Moment Equation Using Pocket Computer by Engr. Ben David PDFDocument18 pages3 Moment Equation Using Pocket Computer by Engr. Ben David PDFSimon ManansalaNo ratings yet
- Damy J Soil Stresses Under A Polygonal Area Uniformly Loaded PDFDocument3 pagesDamy J Soil Stresses Under A Polygonal Area Uniformly Loaded PDFMartin CgNo ratings yet
- ch4 Harmonically Excited Vibrations of SDOFDocument14 pagesch4 Harmonically Excited Vibrations of SDOFMahmoud Abdelghafar ElhussienyNo ratings yet
- Ejemplo Analisis Modal EspectralDocument46 pagesEjemplo Analisis Modal EspectralJORGE DE LA CRUZ GUTIERREZNo ratings yet
- AASHTO-2009 Highway Signs 159 PDFDocument1 pageAASHTO-2009 Highway Signs 159 PDFer_rahmansNo ratings yet
- DOMINICA Building - CodeDocument367 pagesDOMINICA Building - CodemdeenkNo ratings yet
- Manual FiberlineDocument326 pagesManual FiberlineScribdakiottoNo ratings yet
- FIU Bridge Collapse Investigative ReportDocument2 pagesFIU Bridge Collapse Investigative ReportGary DetmanNo ratings yet
- 02 03ChapGereDocument16 pages02 03ChapGereXavier Pacheco PaulinoNo ratings yet
- Sudden Collapse of The 27-Story Space Building in Medellin, Colombia, Yamin Et Al 2018Document13 pagesSudden Collapse of The 27-Story Space Building in Medellin, Colombia, Yamin Et Al 2018Tránsito SUDEN SASNo ratings yet
- Diagrama Interaccion Columna TriangularDocument1 pageDiagrama Interaccion Columna TriangularCarlos CRNo ratings yet
- Collapse of Space Building in Medellín, ColombiaDocument3 pagesCollapse of Space Building in Medellín, ColombiaJulian LizarazoNo ratings yet
- Calculation Spring Value For Horizontal Piles According To MenardDocument2 pagesCalculation Spring Value For Horizontal Piles According To MenardbailescuNo ratings yet
- Mander - Priestley - Park (1988) - Observed Stress-Strain Behavior of Confined ConcreteDocument23 pagesMander - Priestley - Park (1988) - Observed Stress-Strain Behavior of Confined ConcreteSalvatore MirandaNo ratings yet
- Microplane Snippets For Ansys 18Document3 pagesMicroplane Snippets For Ansys 18Flavia GelattiNo ratings yet
- ACI 350-06 ErrataDocument7 pagesACI 350-06 ErrataLuis Ariel B. MorilloNo ratings yet
- Dissertation2004 CasarottiDocument164 pagesDissertation2004 CasarottiDave ThompsonNo ratings yet
- Non Linearity in Structural DynamicsDocument679 pagesNon Linearity in Structural Dynamicsashkantorabi100% (1)
- Apuntes Puentes UMSA PDFDocument152 pagesApuntes Puentes UMSA PDFJahdiel100% (1)
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Filter Design 1Document31 pagesFilter Design 1sadyehclenNo ratings yet
- 1 Basics DSP AV IntroDocument36 pages1 Basics DSP AV IntroUbaid UmarNo ratings yet
- N DSP6Document10 pagesN DSP6soumikaNo ratings yet
- Der 437Document60 pagesDer 437Fábio MenezesNo ratings yet
- PLC Selection CriteriaDocument2 pagesPLC Selection Criteriamanuel rangelNo ratings yet
- Onkyo 2006 Concise EnglishDocument12 pagesOnkyo 2006 Concise Englishshakyamuni007No ratings yet
- Dynamic Characteristic Analysis Multi-Bridge PWM Inverter SSSCDocument6 pagesDynamic Characteristic Analysis Multi-Bridge PWM Inverter SSSCpuzokiNo ratings yet
- Atlas TX-110 Transmitter ManualDocument21 pagesAtlas TX-110 Transmitter Manualraljr101056No ratings yet
- QMODP1xx 2010Document3 pagesQMODP1xx 2010mishu_gNo ratings yet
- BJT2Document12 pagesBJT2swan1619No ratings yet
- LM5020 100V Current Mode PWM Controller: General Description FeaturesDocument13 pagesLM5020 100V Current Mode PWM Controller: General Description FeaturesAlonso CoradoNo ratings yet
- DN 6871Document2 pagesDN 6871ErcarErcar100% (1)
- DSR 9500 PDFDocument35 pagesDSR 9500 PDFanon_712132859No ratings yet
- 3615B English User ManualDocument14 pages3615B English User ManualpmecncNo ratings yet
- Lab 08 (Block Diagram Reduction)Document13 pagesLab 08 (Block Diagram Reduction)Umer EhsanNo ratings yet
- Module 4 PDFDocument30 pagesModule 4 PDFNoor HussainNo ratings yet
- Tpm4.1ela 689Document64 pagesTpm4.1ela 689fvictor1No ratings yet
- Meridian Dsp5000 User ManualDocument0 pagesMeridian Dsp5000 User ManualtejmayerNo ratings yet
- Rockford Fosgate 1100a2Document2 pagesRockford Fosgate 1100a2floyd21No ratings yet
- 320 Lecture 11Document8 pages320 Lecture 11keyboard2014No ratings yet
- ESMC 472059A.101 BrochureDocument2 pagesESMC 472059A.101 BrochuresamNo ratings yet
- What Is Needed in Transformer Models?Document12 pagesWhat Is Needed in Transformer Models?brunoscarpaNo ratings yet
- XAAR Print Head Programming and Parameter Setup 10602Document21 pagesXAAR Print Head Programming and Parameter Setup 10602Abdu Rahman83% (6)
- Laboratory Manual: Analogue and Digital Communication LabDocument3 pagesLaboratory Manual: Analogue and Digital Communication LabFakhar AbbasppNo ratings yet
- Mini Hi-Fi System: Service ManualDocument58 pagesMini Hi-Fi System: Service ManualJuanCarlosCaballero100% (1)
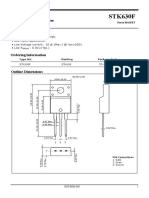
- Transistor MOSFET - STK630Document3 pagesTransistor MOSFET - STK630David Jonatan Alayo LlajarunaNo ratings yet
- S18Document98 pagesS18Harshit Jain0% (1)
- IEEE 802.20: Mobile Broadband Wireless Access A Technical OverviewDocument9 pagesIEEE 802.20: Mobile Broadband Wireless Access A Technical OverviewIsrar UllahNo ratings yet