You might also like
- Wireless Sensor Networks Technology and ProtocolsDocument319 pagesWireless Sensor Networks Technology and ProtocolsChetan Solanki100% (4)
- Is 1077 Common Burnt Clay Building BricksDocument7 pagesIs 1077 Common Burnt Clay Building BricksKathiravan ManimegalaiNo ratings yet
- Year 8 SoundDocument33 pagesYear 8 SoundBaggao Nas Sta Margarita67% (3)
- Chapter 4 PLC ProgrammingDocument100 pagesChapter 4 PLC ProgrammingMuhd Izwan Ikhmal RosliNo ratings yet
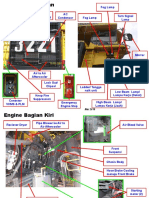
- KOMPONEN - HD785-7 SippDocument23 pagesKOMPONEN - HD785-7 Sippziky dun100% (1)
- Concept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Document5 pagesConcept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Ayush Kumar100% (1)
- Unit Plan English 9.4.2-DramaDocument5 pagesUnit Plan English 9.4.2-DramaMa.robelleF. Papa0% (1)
- 11 12 Control UnitDocument10 pages11 12 Control UnitFuad YimerNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- Forex Pair Performance Strength ScoreDocument10 pagesForex Pair Performance Strength ScoreTradingSystem100% (1)
- Computer Architecture AllClasses-Outline-100-198Document99 pagesComputer Architecture AllClasses-Outline-100-198SrinivasaRaoNo ratings yet
- Parallel Processing Chapter - 3: Instruction Level ParallelismDocument33 pagesParallel Processing Chapter - 3: Instruction Level ParallelismGetu GeneneNo ratings yet
- Unit 05 Design Space of PipelinesDocument24 pagesUnit 05 Design Space of PipelinesSrinivasaRaoNo ratings yet
- Pipeline and Vector ProcessingDocument18 pagesPipeline and Vector ProcessingPavan Pulicherla100% (1)
- Unit-5 (Coa) NotesDocument33 pagesUnit-5 (Coa) NotesyashNo ratings yet
- 4-Concept of PipeliningDocument20 pages4-Concept of Pipeliningtabin iftakharNo ratings yet
- Superscaling in Computer ArchitectureDocument9 pagesSuperscaling in Computer ArchitectureC183007 Md. Nayem HossainNo ratings yet
- Differentiate Organization and Architecture.: Advanced Computer Architechture Assignment 1Document4 pagesDifferentiate Organization and Architecture.: Advanced Computer Architechture Assignment 1AbhishemNo ratings yet
- CA Classes-81-85Document5 pagesCA Classes-81-85SrinivasaRaoNo ratings yet
- PIpeline Processing and Multi ProcessingDocument16 pagesPIpeline Processing and Multi ProcessingYashvant singh GaurNo ratings yet
- NDocument4 pagesNAzri Mohd Khanil0% (1)
- Vector and Pipelined ProcessorsDocument12 pagesVector and Pipelined ProcessorsKeshav LamichhaneNo ratings yet
- Pipe LiningDocument5 pagesPipe LiningRam RamNo ratings yet
- PipeliningDocument5 pagesPipeliningprathz182No ratings yet
- CA Classes-91-95Document5 pagesCA Classes-91-95SrinivasaRaoNo ratings yet
- CA Classes-101-105Document5 pagesCA Classes-101-105SrinivasaRaoNo ratings yet
- CA Classes-76-80Document5 pagesCA Classes-76-80SrinivasaRaoNo ratings yet
- Advanced Computer Architecture 2Document17 pagesAdvanced Computer Architecture 2Pritesh PawarNo ratings yet
- ACA Assignment: Name: Anjali Singh Roll No.: 10001012017 Semester: 7th Class: CSE-2Document4 pagesACA Assignment: Name: Anjali Singh Roll No.: 10001012017 Semester: 7th Class: CSE-2Disha goyalNo ratings yet
- Pipe LiningDocument23 pagesPipe LiningFalguni MathurNo ratings yet
- Chapter 10: Pipeline: ObjectivesDocument8 pagesChapter 10: Pipeline: ObjectivesSteffany RoqueNo ratings yet
- Types of Pipe Lining ProcessorDocument2 pagesTypes of Pipe Lining ProcessorVinay Singh75% (4)
- Pipeline: A Simple Implementation of A RISC Instruction SetDocument16 pagesPipeline: A Simple Implementation of A RISC Instruction SetakhileshNo ratings yet
- Pipeline Processing CoaDocument34 pagesPipeline Processing Coahagos abateNo ratings yet
- Instruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignDocument34 pagesInstruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignMarlon TugweteNo ratings yet
- Feedback Control SystemDocument11 pagesFeedback Control SystemRam Nice100% (2)
- COA AnswersDocument7 pagesCOA AnswersAravindh ANo ratings yet
- Chapter 04 Processors and Memory HierarchyDocument50 pagesChapter 04 Processors and Memory Hierarchyশেখ আরিফুল ইসলাম75% (8)
- Advanced Computer Architecture Assignment-1: Submitted To: Mrs. Rajni SharmaDocument8 pagesAdvanced Computer Architecture Assignment-1: Submitted To: Mrs. Rajni SharmaDisha goyalNo ratings yet
- Design of 3 Stage Pipelining Processor Using VHDLDocument22 pagesDesign of 3 Stage Pipelining Processor Using VHDLsdmdharwadNo ratings yet
- ACA Unit 2,7th Sem CSEDocument13 pagesACA Unit 2,7th Sem CSEReshma BJNo ratings yet
- Instruction PipelineDocument27 pagesInstruction PipelineEswin AngelNo ratings yet
- Computer System OrganizationDocument26 pagesComputer System OrganizationCarl AndersonNo ratings yet
- Co - Unit Ii - IiDocument34 pagesCo - Unit Ii - Iiy22cd125No ratings yet
- IE Report2Document20 pagesIE Report2Haseeb AhmadNo ratings yet
- Aca Module 2Document35 pagesAca Module 2Shiva prasad100% (1)
- VI. Implicit Parallelism - Instruction Level VI. Implicit Parallelism Instruction Level Parallelism. Pipeline Superscalar & Vector P ProcessorsDocument26 pagesVI. Implicit Parallelism - Instruction Level VI. Implicit Parallelism Instruction Level Parallelism. Pipeline Superscalar & Vector P Processorstt_aljobory3911No ratings yet
- Module 4 Note MPDocument14 pagesModule 4 Note MPrinsha. febnNo ratings yet
- Introduction To Parallel Processing: Unit-2Document32 pagesIntroduction To Parallel Processing: Unit-2sushil@irdNo ratings yet
- PipeliningDocument13 pagesPipeliningCS20B1031 NAGALAPURAM DAATHWINAAGHNo ratings yet
- CA Classes-96-100Document5 pagesCA Classes-96-100SrinivasaRaoNo ratings yet
- (123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuDocument71 pages(123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuNguyễn Hoàng HảiNo ratings yet
- Computer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningDocument12 pagesComputer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningAmrendra Kumar MishraNo ratings yet
- ArchitectureDocument14 pagesArchitectureGopal PawarNo ratings yet
- Computer Organization and Architecture Cs2253: Part-ADocument21 pagesComputer Organization and Architecture Cs2253: Part-AjanukarthiNo ratings yet
- Q # 1 What Is Machine Cycle in Computer and How It Works?Document4 pagesQ # 1 What Is Machine Cycle in Computer and How It Works?Coding ExpertNo ratings yet
- CA Classes-106-110Document5 pagesCA Classes-106-110SrinivasaRaoNo ratings yet
- UNIT-5: Pipeline and Vector ProcessingDocument63 pagesUNIT-5: Pipeline and Vector ProcessingAkash KankariaNo ratings yet
- Pipelining and Vector ProcessingDocument28 pagesPipelining and Vector ProcessingBinuVargisNo ratings yet
- Module 4Document12 pagesModule 4Bijay NagNo ratings yet
- Lecture 7 - PIPELININGDocument16 pagesLecture 7 - PIPELININGnoberth nikombolweNo ratings yet
- Unit 4 The Control Unit: Structure NoDocument18 pagesUnit 4 The Control Unit: Structure NoanikhetNo ratings yet
- Pipeline Architecture PDFDocument42 pagesPipeline Architecture PDFChuang James100% (1)
- PipeliningDocument12 pagesPipeliningAradhyaNo ratings yet
- Pipelining: Advanced Computer ArchitectureDocument30 pagesPipelining: Advanced Computer ArchitectureShinisg Vava100% (1)
- E-Book Javascript - Javascript For Dummies Quick Reference PDFDocument115 pagesE-Book Javascript - Javascript For Dummies Quick Reference PDFAmigo Cercano100% (5)
- 3.3-Recent Trends in Parallel ComputingDocument12 pages3.3-Recent Trends in Parallel ComputingChetan SolankiNo ratings yet
- 3.1-Operating System For Parallel ComputerDocument9 pages3.1-Operating System For Parallel ComputerChetan SolankiNo ratings yet
- Unit 3 Interconnection Network: Structure Page NosDocument18 pagesUnit 3 Interconnection Network: Structure Page NosDr. Pradeep Singh ShaktawatNo ratings yet
- 3.2 Performance EvaluationsDocument18 pages3.2 Performance EvaluationsChetan SolankiNo ratings yet
- Unit 3 Parallel Programming: Structure NosDocument26 pagesUnit 3 Parallel Programming: Structure NosChetan SolankiNo ratings yet
- Unit 2 Classification of Parallel Computers: Structure NosDocument19 pagesUnit 2 Classification of Parallel Computers: Structure Nosjind_never_thinkNo ratings yet
- Duke Sound of LoveDocument9 pagesDuke Sound of LoveguillemNo ratings yet
- Transformer IIDocument10 pagesTransformer IIPabitraranjan DasNo ratings yet
- I Need The Design Part Only On Quartus Software - E...Document3 pagesI Need The Design Part Only On Quartus Software - E...Pavahaariny KathegesenNo ratings yet
- The Evolution of Glass Façades - Aleksander T. ŚwiątekDocument10 pagesThe Evolution of Glass Façades - Aleksander T. ŚwiątekAlexSaszaNo ratings yet
- This+is+Grammar+Basic+3+ +정답Document20 pagesThis+is+Grammar+Basic+3+ +정답Cube LeeNo ratings yet
- Pyroelectric and RP HeadsDocument17 pagesPyroelectric and RP HeadsJasin RasheedNo ratings yet
- Review For The Midterm Ii Test Listening Task 1 (TC U7)Document21 pagesReview For The Midterm Ii Test Listening Task 1 (TC U7)Đức Tuấn PhạmNo ratings yet
- BSC Ie Complete Planmodules UpdatedDocument177 pagesBSC Ie Complete Planmodules UpdatedMornig A DarkNo ratings yet
- PL + FH 150 FixDocument1 pagePL + FH 150 FixDedyBrianEricsonNainggolanNo ratings yet
- Quality of Life, Integrative Community Therapy, FamilyDocument11 pagesQuality of Life, Integrative Community Therapy, FamilyMaria Anita QueirozNo ratings yet
- QSS TB ManualDocument63 pagesQSS TB Manualinno danNo ratings yet
- Class 9 Annual Syllabus UpdatedDocument3 pagesClass 9 Annual Syllabus UpdatedyashikaforrealNo ratings yet
- Cotton Cost RecentDocument3 pagesCotton Cost RecentYounus KhanNo ratings yet
- What Is Sequence and Logic Control?Document6 pagesWhat Is Sequence and Logic Control?Marwan ShamsNo ratings yet
- RES101-2 E02 Module 2 Seatwork 1Document2 pagesRES101-2 E02 Module 2 Seatwork 1Count AechNo ratings yet
- Dog Care Brochure National WebDocument9 pagesDog Care Brochure National WebJAIME EDUARDO EnriquezNo ratings yet
- Bda Unit-5 PDFDocument83 pagesBda Unit-5 PDFHarryNo ratings yet
- Write Your Answers Here:: Section 2. PhoneticsDocument10 pagesWrite Your Answers Here:: Section 2. PhoneticsKim Chi TrầnNo ratings yet
- Seminar On 3D Internet: Submitted To: Submitted byDocument19 pagesSeminar On 3D Internet: Submitted To: Submitted bySonu SainiNo ratings yet
- 3 Madden Chase Joyce 1998Document12 pages3 Madden Chase Joyce 1998NBNo ratings yet
- J750 Basic Training Module1 J750 Tester OverviewDocument78 pagesJ750 Basic Training Module1 J750 Tester OverviewyohhongNo ratings yet
- Just Good Friends by Jeffrey ArcherDocument2 pagesJust Good Friends by Jeffrey ArcherCristian Colucci100% (1)
- What Things Do People Often Complain About in Your Country?: Complaint IsDocument5 pagesWhat Things Do People Often Complain About in Your Country?: Complaint IsTrần Ngọc Mỹ TâmNo ratings yet
- Reducing The Braking Distance of An SQL Query Engine: Carey@almaden. Ibm. Corn Kossmann@db, Fmi - Uni-Passau - deDocument12 pagesReducing The Braking Distance of An SQL Query Engine: Carey@almaden. Ibm. Corn Kossmann@db, Fmi - Uni-Passau - dedavidrajhivcNo ratings yet
- Equations of StateDocument11 pagesEquations of StateaguswiadiNo ratings yet