You might also like
- Homework 2Document8 pagesHomework 2Deepak BegrajkaNo ratings yet
- VHDL Code For 4 Bit Multiplayer and DivisionDocument5 pagesVHDL Code For 4 Bit Multiplayer and Divisionsan521050% (2)
- T.vst59 Upgrade Instruction V2.0Document13 pagesT.vst59 Upgrade Instruction V2.0بوند بوندNo ratings yet
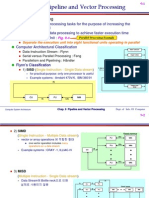
- Pipelining and Vector ProcessingDocument28 pagesPipelining and Vector ProcessingBinuVargisNo ratings yet
- Ca Unit 2.2Document22 pagesCa Unit 2.2GuruKPO100% (2)
- Module 4Document12 pagesModule 4Bijay NagNo ratings yet
- Lecture Notes On Parallel Processing PipelineDocument12 pagesLecture Notes On Parallel Processing PipelineYowaraj ChhetriNo ratings yet
- NDocument4 pagesNAzri Mohd Khanil0% (1)
- Reduced Instruction Set Computer (Risc) Complex Instruction Set Computer (Cisc)Document7 pagesReduced Instruction Set Computer (Risc) Complex Instruction Set Computer (Cisc)Sundari MuthuNo ratings yet
- Pipelining and ParallelismDocument41 pagesPipelining and ParallelismPratham GuptaNo ratings yet
- Pipeline HazardsDocument39 pagesPipeline HazardsPranidhi RajvanshiNo ratings yet
- Design of 3 Stage Pipelining Processor Using VHDLDocument22 pagesDesign of 3 Stage Pipelining Processor Using VHDLsdmdharwadNo ratings yet
- Content: - Introduction To Pipeline Hazard - Structural Hazard - Data Hazard - Control HazardDocument27 pagesContent: - Introduction To Pipeline Hazard - Structural Hazard - Data Hazard - Control HazardAhmed NabilNo ratings yet
- Computer Architecture: Pipelining: Dr. Ashok Kumar TurukDocument136 pagesComputer Architecture: Pipelining: Dr. Ashok Kumar TurukkoottyNo ratings yet
- ch09 Morris ManoDocument15 pagesch09 Morris ManoYogita Negi RawatNo ratings yet
- Instruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignDocument34 pagesInstruction Pipeline Design, Arithmetic Pipeline Deign - Super Scalar Pipeline DesignMarlon TugweteNo ratings yet
- Pipeline and Vector ProcessingDocument18 pagesPipeline and Vector ProcessingPavan Pulicherla100% (1)
- Pipelining and Vector ProcessingDocument37 pagesPipelining and Vector ProcessingJohn DavidNo ratings yet
- Co - Unit Ii - IiDocument34 pagesCo - Unit Ii - Iiy22cd125No ratings yet
- Ch9 OfficialDocument48 pagesCh9 OfficialeducationNo ratings yet
- Pipeline and Vector ProcessingDocument48 pagesPipeline and Vector ProcessingJitendra PatelNo ratings yet
- Computer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningDocument12 pagesComputer Organization: An Introduction To RISC Hardware: 6.1 An Overview of PipeliningAmrendra Kumar MishraNo ratings yet
- Pipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathDocument12 pagesPipelining and Instruction Level Parallelism: 5 Steps of MIPS DatapathNgat SkyNo ratings yet
- Cad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationDocument10 pagesCad For Vlsi 2 Pro Ject - Superscalar Processor ImplementationkbkkrNo ratings yet
- System On Chip: Inside Processor Pipeline StallsDocument12 pagesSystem On Chip: Inside Processor Pipeline StallsPinagani SurajNo ratings yet
- CA Classes-81-85Document5 pagesCA Classes-81-85SrinivasaRaoNo ratings yet
- Coa m5Document46 pagesCoa m5Shanthi.VNo ratings yet
- Pipelining & Riscs: Pipelining Used Key Implementation Technique To Build Fast Processors. ItDocument6 pagesPipelining & Riscs: Pipelining Used Key Implementation Technique To Build Fast Processors. Itfayzee945150No ratings yet
- Pipeline HazardsDocument94 pagesPipeline HazardsManasa RavelaNo ratings yet
- Instruction PipelineDocument27 pagesInstruction PipelineEswin AngelNo ratings yet
- Pipeline ProcessingDocument28 pagesPipeline Processinganismitaray14No ratings yet
- ACA Unit 2,7th Sem CSEDocument13 pagesACA Unit 2,7th Sem CSEReshma BJNo ratings yet
- CS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariDocument82 pagesCS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariDuncan KingNo ratings yet
- Unit-5 (Coa) NotesDocument33 pagesUnit-5 (Coa) NotesyashNo ratings yet
- Instruction Level Parallelism: PipeliningDocument6 pagesInstruction Level Parallelism: PipeliningkbkkrNo ratings yet
- The Big Picture: Requirements Algorithms Prog. Lang./Os Isa Uarch Circuit DeviceDocument60 pagesThe Big Picture: Requirements Algorithms Prog. Lang./Os Isa Uarch Circuit DevicevshlvvkNo ratings yet
- Unit 5-2 COADocument52 pagesUnit 5-2 COAmy storiesNo ratings yet
- Pipeline and Vector ProcessingDocument28 pagesPipeline and Vector ProcessingTerror BladeNo ratings yet
- System On Chip: Inside Processor Pipeline StallsDocument12 pagesSystem On Chip: Inside Processor Pipeline StallsPinagani SurajNo ratings yet
- Instruction PipelineDocument16 pagesInstruction PipelineRamya RamasubramanianNo ratings yet
- Lec18 PipelineDocument59 pagesLec18 PipelineAliGhandiNo ratings yet
- Pipelining and Vector Processing: - ParallelDocument37 pagesPipelining and Vector Processing: - ParallelAmory Sabri AsmaroNo ratings yet
- BER MeterDocument8 pagesBER Metersakti prasad nandaNo ratings yet
- 11 12 Control UnitDocument10 pages11 12 Control UnitFuad YimerNo ratings yet
- FINAL PresentationDocument31 pagesFINAL Presentationsrinithi20032005No ratings yet
- FinalDocument26 pagesFinalHứa Đăng KhoaNo ratings yet
- COA AnswersDocument7 pagesCOA AnswersAravindh ANo ratings yet
- Pipelines - #1 RISC ISA Without PipeDocument9 pagesPipelines - #1 RISC ISA Without PipeHussain HajjarNo ratings yet
- Internal Structure of CPUDocument5 pagesInternal Structure of CPUSaad KhanNo ratings yet
- CS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariDocument82 pagesCS 211: Computer Architecture: Instructor: Prof. Bhagi NarahariElizabeth AliazNo ratings yet
- Computer Organization and Architecture Cs2253: Part-ADocument21 pagesComputer Organization and Architecture Cs2253: Part-AjanukarthiNo ratings yet
- CSC 424 AssignmentDocument8 pagesCSC 424 AssignmentBalsesbiz Consults100% (1)
- Homework3 Solution v2Document41 pagesHomework3 Solution v2razi haiderNo ratings yet
- Lecture 3Document39 pagesLecture 3akttripathi0% (1)
- Computer System OrganizationDocument26 pagesComputer System OrganizationCarl AndersonNo ratings yet
- Module1 UPD W NotesDocument72 pagesModule1 UPD W NotesZhanzhi LiuNo ratings yet
- Advanced Computer Architecture 2Document17 pagesAdvanced Computer Architecture 2Pritesh PawarNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Microcontroller HardwareDocument45 pagesMicrocontroller HardwaredineshlathiaNo ratings yet
- CSE369 Lab1&2 Wi22Document5 pagesCSE369 Lab1&2 Wi22Deniz Melek TürkNo ratings yet
- HT6P20 - Remote Control SystemDocument10 pagesHT6P20 - Remote Control SystemPaulo YamasakiNo ratings yet
- FIFO Intel FPGA IP User Guide: Updated For Intel Quartus Prime Design Suite: 18.0Document35 pagesFIFO Intel FPGA IP User Guide: Updated For Intel Quartus Prime Design Suite: 18.0steffy ruizNo ratings yet
- ECEG3101-LC-Lec - 07 - Adders Comparators Decoders Encoders-1Document36 pagesECEG3101-LC-Lec - 07 - Adders Comparators Decoders Encoders-1Tsinat WondimuNo ratings yet
- Intro To IT Lecture 2ADocument28 pagesIntro To IT Lecture 2ARhix JohnNo ratings yet
- Infineon XMC4500 RMDocument2,636 pagesInfineon XMC4500 RMjohnNo ratings yet
- Chapter 1 (Assembly)Document32 pagesChapter 1 (Assembly)haroonhaniNo ratings yet
- CS302 Midterm Short NotesDocument24 pagesCS302 Midterm Short NotesFaraz KhanNo ratings yet
- PIC16F18877Document671 pagesPIC16F18877Marcio FreitasNo ratings yet
- Profibus Module Im 174 Manual en-US en-USDocument166 pagesProfibus Module Im 174 Manual en-US en-USViduranga BandaraNo ratings yet
- Architecture of 8086Document17 pagesArchitecture of 8086sreenimolNo ratings yet
- Information Brochure: Iiit BhagalpurDocument12 pagesInformation Brochure: Iiit BhagalpurshountyNo ratings yet
- Daftar Pasaran Harga Laptop AcerDocument9 pagesDaftar Pasaran Harga Laptop AcerFegi Dwi Adi SatriaNo ratings yet
- Log 2016-12-14 12-03-12Document139 pagesLog 2016-12-14 12-03-12redsaqNo ratings yet
- Fire FightingDocument39 pagesFire FightingVishu Grover100% (1)
- Sti Is1462 - Fic Lm10w - Rev 0.7Document55 pagesSti Is1462 - Fic Lm10w - Rev 0.7Christopher LloydNo ratings yet
- HT1620 Holtek Elenota - PLDocument17 pagesHT1620 Holtek Elenota - PLtirekNo ratings yet
- EET 319 Programmable Logic ControllersDocument45 pagesEET 319 Programmable Logic ControllersIan SpacekNo ratings yet
- Design of Automatic Washing Machine Based On Verilog HDL LanguageDocument3 pagesDesign of Automatic Washing Machine Based On Verilog HDL LanguagePrasadCollegesNo ratings yet
- Analysis of Sequential CircuitsDocument32 pagesAnalysis of Sequential CircuitsakshayNo ratings yet
- C and TOUCH SCREEN BASED LIBRARY BOOK CATALOG SYSTEMDocument5 pagesC and TOUCH SCREEN BASED LIBRARY BOOK CATALOG SYSTEMkranthirishi100% (1)
- TXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull ApplicationsDocument47 pagesTXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull Applicationskarthik4096No ratings yet
- CSETDocument117 pagesCSETmroizo9999100% (1)
- 800 Series IO Modules With Unity Pro Reference Manual PDFDocument616 pages800 Series IO Modules With Unity Pro Reference Manual PDFLalo De GanteNo ratings yet
- DE10-Nano User Manual A BDocument118 pagesDE10-Nano User Manual A BSooraj J PNo ratings yet
- ESC OverviewDocument3 pagesESC Overviewraytsao65No ratings yet
- Verilog Code For Counter With Testbench PDFDocument1 pageVerilog Code For Counter With Testbench PDFBien MedinaNo ratings yet