You might also like
- ME2050 Exam Mock Exam 2 ScriptDocument9 pagesME2050 Exam Mock Exam 2 ScriptS.A. BeskalesNo ratings yet
- Torsional Instability of Single Axis Solar Tracking Systems Rohr Bourke Banks 2015Document7 pagesTorsional Instability of Single Axis Solar Tracking Systems Rohr Bourke Banks 2015bpchimeraNo ratings yet
- 442 GSPH101 Chapter - 2Document24 pages442 GSPH101 Chapter - 2Basem AaNo ratings yet
- Jack-Up Legs Structural Strength Analysis. DQC-PTHDocument10 pagesJack-Up Legs Structural Strength Analysis. DQC-PTHHoang Tien DungNo ratings yet
- Earthquake Design Equipment SupportsDocument7 pagesEarthquake Design Equipment Supportsmseif1980No ratings yet
- Structural DynamicsDocument63 pagesStructural DynamicsElena Baciu100% (3)
- Describing Motion Kinematics in One DimentionDocument40 pagesDescribing Motion Kinematics in One DimentionJeffrey TactayNo ratings yet
- Marba IntroDocument9 pagesMarba IntroMohamed Omar IbrahimNo ratings yet
- Structural Dynamics 2009-10Document144 pagesStructural Dynamics 2009-10Chinnaraja Gandhi100% (4)
- Structural DynamicsDocument63 pagesStructural DynamicsthakrarhitsNo ratings yet
- Milestone 3 Preliminary Design: Team B.Y.O.HDocument17 pagesMilestone 3 Preliminary Design: Team B.Y.O.Hcleung15No ratings yet
- 5 - Structural DynamicsDocument139 pages5 - Structural DynamicsJohn Rheynor Mayo100% (2)
- Lab 1 SatDocument6 pagesLab 1 SatMuhammad MirzaNo ratings yet
- Flight Control Systems Assignment 2Document30 pagesFlight Control Systems Assignment 2Ali HamzaNo ratings yet
- Newton 2 SlopeDocument8 pagesNewton 2 SlopeSiwadol DejphumeeNo ratings yet
- Physics 1B Chapter 14 Periodic MotionDocument40 pagesPhysics 1B Chapter 14 Periodic MotionsuperwebonNo ratings yet
- FFT_1Document4 pagesFFT_1Avinash Kumar Jha 4-Year B.Tech. Mechanical EngineeringNo ratings yet
- Anti-Sway System For Ship-to-Shore Cranes: Raubar, E. - Vrančić, DDocument7 pagesAnti-Sway System For Ship-to-Shore Cranes: Raubar, E. - Vrančić, Dsajjad_naghdi241No ratings yet
- Measuring Frictional Torque on a Rotating DiscDocument5 pagesMeasuring Frictional Torque on a Rotating DiscSeethaNo ratings yet
- Stability augmentation systems: Acquiring dynamic and static stabilityDocument4 pagesStability augmentation systems: Acquiring dynamic and static stabilitySuraj ChaurasiyaNo ratings yet
- Ch6 Statics 2014Document10 pagesCh6 Statics 2014tarek mahmoudNo ratings yet
- 1 s2.0 S147466701643750X Main PDFDocument2 pages1 s2.0 S147466701643750X Main PDFhany ahmedNo ratings yet
- Air Track Collisions Lab Verifies Momentum ConservationDocument8 pagesAir Track Collisions Lab Verifies Momentum ConservationShweta SridharNo ratings yet
- Verify Law of Conservation of Energy for Rolling Disc LabDocument4 pagesVerify Law of Conservation of Energy for Rolling Disc LabJAZAB ALINo ratings yet
- CE-6172 Lec 3 Optimal Stiffness & Damping - Dynamic LoadingDocument54 pagesCE-6172 Lec 3 Optimal Stiffness & Damping - Dynamic LoadingRaquib AhsanNo ratings yet
- Quiz1解答Document10 pagesQuiz1解答Fang ChynNo ratings yet
- Axisvm Footfall Guide enDocument16 pagesAxisvm Footfall Guide enbmirza70No ratings yet
- SD GRDocument17 pagesSD GRApril IngramNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- p2 Revision Guide HigherDocument66 pagesp2 Revision Guide Higherapi-320022467No ratings yet
- Model-Based Soil Trip Rollover PredictionDocument10 pagesModel-Based Soil Trip Rollover PredictionKunheechoNo ratings yet
- Jacket LaunchingDocument8 pagesJacket LaunchingBolarinwaNo ratings yet
- Experiment 6: Coefficient of Restitution: Nicole Irvin H. Balbastro, Phy10L/BC2Document4 pagesExperiment 6: Coefficient of Restitution: Nicole Irvin H. Balbastro, Phy10L/BC2GedNo ratings yet
- NLaw ExperimentDocument14 pagesNLaw Experimentfabiolalu GonzalezNo ratings yet
- EC-1 Assignment 1 (22-S1)Document3 pagesEC-1 Assignment 1 (22-S1)Vipul PatilNo ratings yet
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDocument14 pages02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- Autumn 2020 NA31007 3-1-0, 4 CreditsDocument2 pagesAutumn 2020 NA31007 3-1-0, 4 CreditsSuraj GaikwadNo ratings yet
- Dynamic Wake1Document12 pagesDynamic Wake1Abdulqadir Aziz Singapore WalaNo ratings yet
- Effect of Temperature On The Damping Ratio of A Spring Suspension SystemDocument24 pagesEffect of Temperature On The Damping Ratio of A Spring Suspension SystemviroonprakhunNo ratings yet
- Physics Workbook - FVV101 - Part B - MechanicsDocument78 pagesPhysics Workbook - FVV101 - Part B - MechanicsgideonmknNo ratings yet
- 10 Dynamic AnalysisDocument113 pages10 Dynamic AnalysisThiên KhánhNo ratings yet
- System Level Simulation of Servo Accelerometer in SimulinkDocument8 pagesSystem Level Simulation of Servo Accelerometer in Simulinkohpigha6048No ratings yet
- Dynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldFrom EverandDynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 2: Gravitational and Inertial Control, #2No ratings yet
- Frequency Analysis of Vibration Energy Harvesting SystemsFrom EverandFrequency Analysis of Vibration Energy Harvesting SystemsRating: 5 out of 5 stars5/5 (1)
- O level Physics Questions And Answer Practice Papers 2From EverandO level Physics Questions And Answer Practice Papers 2Rating: 5 out of 5 stars5/5 (1)
- An Introduction to Stochastic Modeling, Student Solutions Manual (e-only)From EverandAn Introduction to Stochastic Modeling, Student Solutions Manual (e-only)No ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Spectral method for fatigue damage estimation with non-zero mean stressFrom EverandSpectral method for fatigue damage estimation with non-zero mean stressNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Review of Maple 2018Document22 pagesReview of Maple 2018peanut painNo ratings yet
- Maple15NewFeatures PDFDocument6 pagesMaple15NewFeatures PDFpeanut painNo ratings yet
- Maple15NewFeatures PDFDocument6 pagesMaple15NewFeatures PDFpeanut painNo ratings yet
- How Maple Compares To Mathematica: A Cybernet Group CompanyDocument22 pagesHow Maple Compares To Mathematica: A Cybernet Group CompanyJuan MNo ratings yet
- LW C100plus Auto Chemistry Analyzer Operation ManualDocument125 pagesLW C100plus Auto Chemistry Analyzer Operation Manualgerson100% (1)
- General ISO Geometrical TolerancesDocument2 pagesGeneral ISO Geometrical TolerancesMaheshNo ratings yet
- SINCE 1922, PRECISION ENGINEERED ROTARY SPRAY HEADSDocument32 pagesSINCE 1922, PRECISION ENGINEERED ROTARY SPRAY HEADSLai Ming YihNo ratings yet
- Pipe Design Calculations Asme B31 3Document1 pagePipe Design Calculations Asme B31 3rocap76046No ratings yet
- PIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersDocument9 pagesPIP STS02380, Application of ACI336.1-01 Specification For The Construction of Drilled PiersErik PerezNo ratings yet
- Atlassian PDFDocument1 pageAtlassian PDFITISHA JAINNo ratings yet
- CA VD4-R (EN) - CatalogDocument72 pagesCA VD4-R (EN) - Catalogdorin serbanNo ratings yet
- Oracle Fusion ProcurementDocument173 pagesOracle Fusion ProcurementPritesh Mogane100% (9)
- RoboTek Arduino Level 2Document379 pagesRoboTek Arduino Level 2Lace CabatoNo ratings yet
- DWD Summo AllDocument4 pagesDWD Summo AllMario Allesina JuniorNo ratings yet
- Nikhil KulkarniDocument3 pagesNikhil KulkarniSumitNo ratings yet
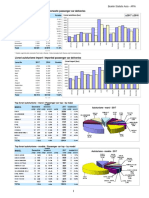
- Livrari Autoturisme Autohtone / Domestic Passenger Car DeliveriesDocument3 pagesLivrari Autoturisme Autohtone / Domestic Passenger Car DeliveriesBogdan PopNo ratings yet
- Duk GB FlowDocument7 pagesDuk GB Flowanil_stephenNo ratings yet
- Oracle Fixed AssetsDocument1,204 pagesOracle Fixed AssetsYudha Prayoga100% (1)
- Aircraft Electrical Wiring Interconnect System (EWIS) Best PracticesDocument176 pagesAircraft Electrical Wiring Interconnect System (EWIS) Best Practicesnayapepe100% (5)
- Session 2 - Evolution of LSM From WSM and Introduction To IS-456Document3 pagesSession 2 - Evolution of LSM From WSM and Introduction To IS-456Dhananjay DesaleNo ratings yet
- Modeling Biologics, Antibodies & ProteinsDocument2 pagesModeling Biologics, Antibodies & Proteinsthamizh555No ratings yet
- Description and Operation: Unison Industries Component Maintenance Manual Ignition LeadsDocument2 pagesDescription and Operation: Unison Industries Component Maintenance Manual Ignition Leadsmaty englerNo ratings yet
- Stabilization and Solidification of Hazardous, Radioactive, and Mixed Wastes PDFDocument391 pagesStabilization and Solidification of Hazardous, Radioactive, and Mixed Wastes PDF김혜인No ratings yet
- Essential PDMS Commands for Piping, Equipment & StructuresDocument12 pagesEssential PDMS Commands for Piping, Equipment & StructuresmishtinilNo ratings yet
- Automated Guided VehicleDocument17 pagesAutomated Guided VehicleTedy ThomasNo ratings yet
- ESA322 Dynamic Vibration Absorber ProjectDocument15 pagesESA322 Dynamic Vibration Absorber ProjectAhmad ShaqeerNo ratings yet
- CNL QuestionsDocument2 pagesCNL QuestionsrathodrbNo ratings yet
- Adfl Corporate BrocheureDocument6 pagesAdfl Corporate Brocheurepranjal92pandeyNo ratings yet
- Edm Electrodes: Function of The ElectrodeDocument8 pagesEdm Electrodes: Function of The ElectrodeTaimur KhalidNo ratings yet
- 7.4 Emf and Internal Resistance 09Document11 pages7.4 Emf and Internal Resistance 09b_syiera100% (1)
- Electrical GroundingDocument25 pagesElectrical Groundingvishwajit R SNo ratings yet
- Polyken 930 TapeDocument2 pagesPolyken 930 TapeKyaw Kyaw AungNo ratings yet
- Beginners GuideDocument297 pagesBeginners GuideLeandro ÁvilaNo ratings yet
- B.tech. Civil Engineering Full Syllabus IndiaDocument118 pagesB.tech. Civil Engineering Full Syllabus IndiaAnubhav GargNo ratings yet