You might also like
- 6 Speed Automatic Transaxle AWF21 PDFDocument66 pages6 Speed Automatic Transaxle AWF21 PDFMihai Mitrea100% (3)
- Nissan 1B2Document104 pagesNissan 1B2Nhàn Nguyễn Thanh100% (3)
- 8L90 IntroductionDocument66 pages8L90 IntroductionBrandon100% (5)
- Auto Pilot PR 9000 DM - Operator'smanual (E) (E11 3085a - May2014)Document430 pagesAuto Pilot PR 9000 DM - Operator'smanual (E) (E11 3085a - May2014)LUCKY CHAND100% (2)
- IMPCO Model CA100 CaburetorDocument6 pagesIMPCO Model CA100 CaburetorMaxiSanchezNo ratings yet
- Engine Control System DiagramDocument8 pagesEngine Control System DiagramGowher QadriNo ratings yet
- Steering ControlDocument15 pagesSteering ControlBerbaño, Jan Joshua100% (2)
- Introduction to Flight Control SystemsDocument34 pagesIntroduction to Flight Control SystemsshivaspyNo ratings yet
- Patrol Y61 2.8 TD Ecu System Operation DiagramDocument9 pagesPatrol Y61 2.8 TD Ecu System Operation Diagramvali_nedelea100% (1)
- DSG TransmissionDocument69 pagesDSG TransmissionOvidiu Bir100% (12)
- Group 17 Body, Doors and WindowsDocument57 pagesGroup 17 Body, Doors and Windowsapi-3802918100% (3)
- Steering System and Main Propulsion ArrangementDocument26 pagesSteering System and Main Propulsion ArrangementveramondNo ratings yet
- System 55 Autopilot: Pilot's Information ManualDocument64 pagesSystem 55 Autopilot: Pilot's Information ManualbibiNo ratings yet
- TC-SST Transmission & Mechatronic Assembly Diagnosis & Repair - RevisedDocument33 pagesTC-SST Transmission & Mechatronic Assembly Diagnosis & Repair - RevisedEdward ArtigasNo ratings yet
- Autopilot - Description and OperationDocument6 pagesAutopilot - Description and OperationEleazarNo ratings yet
- Steering SystemDocument15 pagesSteering SystemRahul KushwahaNo ratings yet
- TotalCommand 21 EUDocument8 pagesTotalCommand 21 EUengineer.ibrahim.miNo ratings yet
- Cruise Control System OperationDocument10 pagesCruise Control System OperationChandu 143No ratings yet
- Piping Stress Analysis PhilosophyDocument8 pagesPiping Stress Analysis PhilosophybaluNo ratings yet
- Bridge Control System by Oladokun SulaimanDocument8 pagesBridge Control System by Oladokun Sulaimanoladokunsulaiman100% (1)
- Automatic Transmission For Range Rover 4 6 HSE P68Document20 pagesAutomatic Transmission For Range Rover 4 6 HSE P68Louise RogersNo ratings yet
- PQCS2Document9 pagesPQCS2Adrian Barrios CruzNo ratings yet
- Pilot Guide Kfc250 BendixDocument28 pagesPilot Guide Kfc250 BendixJavier100% (1)
- Sistema de Control de Acelerador Motor 2ZR-FEDocument12 pagesSistema de Control de Acelerador Motor 2ZR-FESamuel GarzaNo ratings yet
- All About Steering System.Document12 pagesAll About Steering System.Ramprabu Chandrasekar100% (1)
- DTC P0776 Pressure Control Solenoid "B" Performance (Shift Solenoid Valve SL2)Document4 pagesDTC P0776 Pressure Control Solenoid "B" Performance (Shift Solenoid Valve SL2)freddys merchanNo ratings yet
- DTC P0766 Shift Solenoid "D" Performance (Shift Solenoid Valve S4)Document4 pagesDTC P0766 Shift Solenoid "D" Performance (Shift Solenoid Valve S4)marran almarranyNo ratings yet
- Steering Gear Systems On Ships Marine enDocument5 pagesSteering Gear Systems On Ships Marine enPaul PraveenNo ratings yet
- DMRC Project (Mech)Document59 pagesDMRC Project (Mech)Bharat Singh100% (1)
- Automatic Transmission/Transaxle External Controls - Vehicles With: AWF21 6-Speed Automatic TransmissionDocument12 pagesAutomatic Transmission/Transaxle External Controls - Vehicles With: AWF21 6-Speed Automatic Transmissionbelaghmas100% (1)
- Transmission Control Module (TCM) : Wheel Speed Sensors Engine Speed & Transmission Input SpeedDocument3 pagesTransmission Control Module (TCM) : Wheel Speed Sensors Engine Speed & Transmission Input SpeedChris Chris100% (1)
- Land Rover Bosch GS8.87 Transmission Management (D2 & RR P38)Document13 pagesLand Rover Bosch GS8.87 Transmission Management (D2 & RR P38)ZM OhnNo ratings yet
- Control+system New ModelDocument136 pagesControl+system New ModelTimkenNo ratings yet
- 09e 5 PDFDocument26 pages09e 5 PDFruslan1580No ratings yet
- Rudder steering control systemDocument5 pagesRudder steering control systemamditraNo ratings yet
- RM 61Document653 pagesRM 61joxeno907No ratings yet
- Steering Gear SystemDocument6 pagesSteering Gear SystemMohammad Jahid AlamNo ratings yet
- RollDocument2 pagesRollEka Putra SangajiNo ratings yet
- Steering Gear Systems On Ships NotesDocument13 pagesSteering Gear Systems On Ships NotesRoche Gallardo TampilNo ratings yet
- PB PDFDocument53 pagesPB PDFMax K.No ratings yet
- TCU Schematic and Control System ExplainedDocument52 pagesTCU Schematic and Control System ExplainedRoe De HardtoknowNo ratings yet
- A340e PDFDocument118 pagesA340e PDFWawan SatiawanNo ratings yet
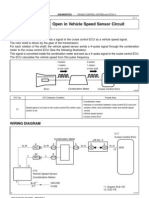
- DTC 21 Open in Vehicle Speed Sensor CircuitDocument3 pagesDTC 21 Open in Vehicle Speed Sensor CircuitErln LimaNo ratings yet
- Chapter 1 Steering GearDocument18 pagesChapter 1 Steering GearPeter Ralph GaliciaNo ratings yet
- KFC-250 Flight Control SystemDocument28 pagesKFC-250 Flight Control SystemMarcus DragoNo ratings yet
- Steering GearDocument30 pagesSteering Gearbandar2100% (2)
- Servomechanism: Application of Servo MechanismDocument6 pagesServomechanism: Application of Servo MechanismJawad SandhuNo ratings yet
- Generic PID DefinitionsDocument4 pagesGeneric PID DefinitionsNicoara Stoica Paul FlorinNo ratings yet
- 142-PilotSea AM AlphaPilot MFM - Brochure 11-12-2018Document12 pages142-PilotSea AM AlphaPilot MFM - Brochure 11-12-2018Fabrice KouassiNo ratings yet
- 13 - PDFsam - REHS2892-08 Electrical A&I Guide For Frac Xmissions TH48-E70, TH55-E70 & TH55-E90Document1 page13 - PDFsam - REHS2892-08 Electrical A&I Guide For Frac Xmissions TH48-E70, TH55-E70 & TH55-E90tvwrightNo ratings yet
- Luis Info InglesDocument4 pagesLuis Info InglesFrank Mcgyver Yana CarpioNo ratings yet
- Canadair Regional Jet 100/200 - Automatic Flight Control SystemDocument28 pagesCanadair Regional Jet 100/200 - Automatic Flight Control Systemmamon113No ratings yet
- DTC P0016 Crankshaft Position - Camshaft Position Corre-Lation (Bank 1 Sensor A)Document2 pagesDTC P0016 Crankshaft Position - Camshaft Position Corre-Lation (Bank 1 Sensor A)robin blahoutNo ratings yet
- Servo Tuning TutorialDocument38 pagesServo Tuning TutorialpranavNo ratings yet
- Chapter1 121210210811 Phpapp02Document57 pagesChapter1 121210210811 Phpapp02sharkeraNo ratings yet
- Week 1 M-Motronic Systems LectureDocument16 pagesWeek 1 M-Motronic Systems LectureAhmed El-helwNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersFrom EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersRating: 5 out of 5 stars5/5 (2)
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsFrom EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNo ratings yet
- Aq-10 ImeDocument27 pagesAq-10 ImetuyenNo ratings yet
- XN13A-6 Radiator Installation InstructionsDocument1 pageXN13A-6 Radiator Installation InstructionstuyenNo ratings yet
- LH-300 Loud Hailer How To ConnectDocument1 pageLH-300 Loud Hailer How To ConnecttuyenNo ratings yet
- Connecting GMDSS Navtex To DPU-414Document1 pageConnecting GMDSS Navtex To DPU-414tuyenNo ratings yet
- LH-3000 InterconnectDocument3 pagesLH-3000 InterconnecttuyenNo ratings yet
- Installation HandBook PDFDocument277 pagesInstallation HandBook PDFtuyenNo ratings yet
- Updating equipment at installationDocument4 pagesUpdating equipment at installationtuyenNo ratings yet
- Technical ManualDocument24 pagesTechnical ManualtuyenNo ratings yet
- Systems ConfigurationDocument14 pagesSystems ConfigurationtuyenNo ratings yet
- DS 80 Manual PDFDocument82 pagesDS 80 Manual PDFIlko PenevNo ratings yet
- MC 3-2010-12-3 - Ssas - v3Document8 pagesMC 3-2010-12-3 - Ssas - v3tuyenNo ratings yet
- DS 80 Manual PDFDocument82 pagesDS 80 Manual PDFIlko PenevNo ratings yet
- Raider Max 175sDocument43 pagesRaider Max 175sTEXASBAGMANNo ratings yet
- fC81047 Cursor9CamshaftTimingforCAMwithEXHAUSTBRAKEJuly2013rev1Document8 pagesfC81047 Cursor9CamshaftTimingforCAMwithEXHAUSTBRAKEJuly2013rev1Victor Pinedo100% (1)
- NIMAK Tuenkers Weldinggun IIbDocument17 pagesNIMAK Tuenkers Weldinggun IIbkarthikeyan1992No ratings yet
- Scania TruckDocument37 pagesScania TruckMulyadi Tarchani100% (6)
- Trek Slash 9.8 e 9.9 Carbon 2015Document2 pagesTrek Slash 9.8 e 9.9 Carbon 2015BICICULTNo ratings yet
- Mobile workbench with steel frame and locking drawersDocument1 pageMobile workbench with steel frame and locking drawersIkram KhanNo ratings yet
- Uso e Manutenzione - Owner's Manual - : USA Model Year 2003Document296 pagesUso e Manutenzione - Owner's Manual - : USA Model Year 2003jaison xaviourNo ratings yet
- MD CGM MixerDocument2 pagesMD CGM MixerArmando EscobarNo ratings yet
- AC+Components 2015-2016Document1,124 pagesAC+Components 2015-2016shtylyk100% (1)
- GPS WheelsDocument48 pagesGPS WheelsYang GomezNo ratings yet
- 4b Serie GdriveDocument144 pages4b Serie GdriveAlexis SanchezNo ratings yet
- Speaker Assembly TS200 Series B1Document1 pageSpeaker Assembly TS200 Series B1Carlos RosalesNo ratings yet
- Ford Mustang Company TimelineDocument8 pagesFord Mustang Company TimelineJocelynL.LpzNo ratings yet
- Fh84tp6a GBR EngDocument6 pagesFh84tp6a GBR EngRicardo Sanchis GarciaNo ratings yet
- Komatsu D85EXPX 15Document16 pagesKomatsu D85EXPX 15ofar0% (1)
- Mv. Adriani: Bulk CarrierDocument33 pagesMv. Adriani: Bulk CarrierHazemy putraNo ratings yet
- Threaded Rod, U-Bolts, & Spring Accessories May 2015Document32 pagesThreaded Rod, U-Bolts, & Spring Accessories May 2015Isidro Garcia VelazquezNo ratings yet
- 10 years together. Solaris celebrates anniversary with pressDocument21 pages10 years together. Solaris celebrates anniversary with pressjurzdanNo ratings yet
- Briggs & Stratton Parts List MS5535 - H - HIDocument16 pagesBriggs & Stratton Parts List MS5535 - H - HIdakehi11883421No ratings yet
- Cessna 185 Familiarisation CourseDocument5 pagesCessna 185 Familiarisation CourseAmmar A. AlliNo ratings yet
- G100Document1 pageG100Anang Widhi PrasetiaNo ratings yet
- Factual Report Text KD 3.21 & 4.21Document2 pagesFactual Report Text KD 3.21 & 4.21Medika Dwi Putriaa50% (2)
- SWOT Analysis of NissanDocument9 pagesSWOT Analysis of NissanArnel BendoNo ratings yet
- Camshaft - Install: Disassembly and AssemblyDocument4 pagesCamshaft - Install: Disassembly and AssemblyВиталийNo ratings yet
- European OPT 5405Document32 pagesEuropean OPT 5405Teodoran DoruNo ratings yet
- Course Implement Hydraulic System Caterpillar 994 Loader Parts Valves Components Diagrams Schematics PDFDocument22 pagesCourse Implement Hydraulic System Caterpillar 994 Loader Parts Valves Components Diagrams Schematics PDFBruno Cecatto100% (1)
- Design and Fabrication of Anti-Lock Breaking System AbsDocument4 pagesDesign and Fabrication of Anti-Lock Breaking System Abssuraj j kNo ratings yet
- Kohler CV17 - CV26 Owners ManualDocument20 pagesKohler CV17 - CV26 Owners ManualkosmokiteNo ratings yet