You might also like
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 4 out of 5 stars4/5 (4)
- CAT - Resolucion Falla Engine Speed - TestDocument6 pagesCAT - Resolucion Falla Engine Speed - TestSebastian Rodrigo OctavianoNo ratings yet
- 94 Isuzu Trooper Valve Cover RepairDocument5 pages94 Isuzu Trooper Valve Cover Repairturbopimp2000No ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Speed Control (Switch) - Test (RENR5096)Document4 pagesSpeed Control (Switch) - Test (RENR5096)Josip MiškovićNo ratings yet
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- FinalYearProject-DC Motor Speed Control PIC16F877ADocument57 pagesFinalYearProject-DC Motor Speed Control PIC16F877ACata83% (6)
- Feedback and Control Systems ProjectDocument9 pagesFeedback and Control Systems ProjectDino Ligutan100% (2)
- Comparative Study of Pi, Ip, Fuzzy, Neuro-Fuzzy Controllers For Speed Control of A D.C.MotorDocument35 pagesComparative Study of Pi, Ip, Fuzzy, Neuro-Fuzzy Controllers For Speed Control of A D.C.MotorKaranam KarthikNo ratings yet
- Position and Speed Control For Dish DC Motor: ObjectivesDocument4 pagesPosition and Speed Control For Dish DC Motor: ObjectivesGoran MiljkovicNo ratings yet
- DC Motor Closed LoopDocument11 pagesDC Motor Closed Looprichard chombaNo ratings yet
- Speed Control of 3 - Phase Induction Motor (Report File)Document22 pagesSpeed Control of 3 - Phase Induction Motor (Report File)29 - 084 - MD Hridoy HasanNo ratings yet
- MP Electrical Drives Lab ManualDocument37 pagesMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- 21ee3101-Control Systems - Lab Skill Workbook - FinalDocument46 pages21ee3101-Control Systems - Lab Skill Workbook - FinalmohansaikrnaNo ratings yet
- Design of Traffic Light ControlDocument16 pagesDesign of Traffic Light ControlPrerit RathiNo ratings yet
- Research On Servo Motor Motion Control System BaseDocument8 pagesResearch On Servo Motor Motion Control System BaseAhmed AliNo ratings yet
- Subject: Student: Practice Name: Digital Systems 2Document2 pagesSubject: Student: Practice Name: Digital Systems 2Yamil López PérezNo ratings yet
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocument13 pagesPi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNo ratings yet
- CS328 DSPDocument4 pagesCS328 DSPMohammed BenbrahimNo ratings yet
- 2688 DerechoDocument4 pages2688 DerechoDiego CatariNo ratings yet
- Space Engineering Lab Manual MDocument43 pagesSpace Engineering Lab Manual Mmanikandan_murugaiahNo ratings yet
- 05 - DC Motor Control Using PLCDocument49 pages05 - DC Motor Control Using PLCKoppoju PadmaNo ratings yet
- SY - EST7L Experiment 7 v3Document9 pagesSY - EST7L Experiment 7 v3luigi.dimayugaNo ratings yet
- A Review On Rapid Control of A Brushless Motor in An Hybrid SystemDocument4 pagesA Review On Rapid Control of A Brushless Motor in An Hybrid Systemsunil kumarNo ratings yet
- BLDC Motor Fed by Ann Based MPPT Applied Solar PV Array For Water Pumping System Based On Luo ConverterDocument5 pagesBLDC Motor Fed by Ann Based MPPT Applied Solar PV Array For Water Pumping System Based On Luo ConverterRaghavNo ratings yet
- American International University-Bangladesh (AIUB) Faculty of EngineeringDocument9 pagesAmerican International University-Bangladesh (AIUB) Faculty of Engineeringsaikat ghoshNo ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- PMSMDocument30 pagesPMSMAnonymous ee761NXjNo ratings yet
- Speed Timing SensorsDocument7 pagesSpeed Timing SensorsBishoo ShenoudaNo ratings yet
- Matlab-Simulink Controller DesignDocument4 pagesMatlab-Simulink Controller DesignMohamed SomaiNo ratings yet
- Esy Report 34Document16 pagesEsy Report 34Shubham TayadeNo ratings yet
- Double Closed-Loop PI Controller Tuning For MotorDocument8 pagesDouble Closed-Loop PI Controller Tuning For MotorvrajakisoriDasiNo ratings yet
- My Micro Initial CepDocument5 pagesMy Micro Initial CepHD SheikhNo ratings yet
- Neural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.Document4 pagesNeural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.seventhsensegroupNo ratings yet
- PID Practical PDFDocument18 pagesPID Practical PDFJose Luis HurtadoNo ratings yet
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocument75 pagesProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Lab 5 ReportDocument12 pagesLab 5 ReportMelaku DinkuNo ratings yet
- Ree PortDocument14 pagesRee PortramsastryNo ratings yet
- EX-602 Control SystemDocument27 pagesEX-602 Control SystemdeepaknayanNo ratings yet
- Single Phase To Three Phase Converstion Using Two Parallel RectifiersDocument89 pagesSingle Phase To Three Phase Converstion Using Two Parallel RectifiersThriveni Maddineni83% (6)
- Mechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderDocument6 pagesMechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderAli ChallakNo ratings yet
- Buck ConverterDocument4 pagesBuck ConverterPulkit BucchaNo ratings yet
- Control Systems and Simulation LabDocument91 pagesControl Systems and Simulation Labkiran_y2No ratings yet
- DESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemDocument7 pagesDESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemjayxcellNo ratings yet
- Project ReportDocument105 pagesProject ReportSoniya CsNo ratings yet
- Engine Fan Control Solenoid Circuit - Test: TroubleshootingDocument8 pagesEngine Fan Control Solenoid Circuit - Test: Troubleshootingtommy lanyonNo ratings yet
- Low Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesDocument6 pagesLow Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesAlex CastilloNo ratings yet
- CS EsmDocument58 pagesCS EsmsriramrpselvamNo ratings yet
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- 36 - A New Microcontroller-Based MPPT Algorithm For Photovoltaic AplicationDocument102 pages36 - A New Microcontroller-Based MPPT Algorithm For Photovoltaic AplicationMartin TrujilloNo ratings yet
- Speed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0Document41 pagesSpeed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0subbanna100% (1)
- Direct Torque Control of Induction MotorsDocument6 pagesDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Faculty of Engineering Department of Aerospace Engineering: Lab InstructorDocument24 pagesFaculty of Engineering Department of Aerospace Engineering: Lab InstructorhishamwahidinNo ratings yet
- Lab 5 Reportgroup Name IdDocument16 pagesLab 5 Reportgroup Name IdMelaku DinkuNo ratings yet
- Group 4 Lab 5Document16 pagesGroup 4 Lab 5Melaku DinkuNo ratings yet
- DC Motor Modelling and Control Using Fuzzy Logic Controller (FLC)Document8 pagesDC Motor Modelling and Control Using Fuzzy Logic Controller (FLC)Hazar JojoNo ratings yet
- DC Motor LabviewDocument23 pagesDC Motor Labviewsara_ogl7No ratings yet
- Angular Position (FULL REPORT)Document19 pagesAngular Position (FULL REPORT)Farid AsyrafNo ratings yet
- AnotherDocument51 pagesAnotherRoopam AmborNo ratings yet
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Continental Experience PPT EEE-2018Document9 pagesContinental Experience PPT EEE-2018anushkaNo ratings yet
- Alltech Electronics and Services #42, 4 Cross KR Layout, JP Nagar 6 Phase, Bengaluru 560078Document3 pagesAlltech Electronics and Services #42, 4 Cross KR Layout, JP Nagar 6 Phase, Bengaluru 560078anushkaNo ratings yet
- Difficult Conceptions in EngineeringDocument3 pagesDifficult Conceptions in EngineeringanushkaNo ratings yet
- Automotive ElectronicsDocument100 pagesAutomotive ElectronicsanushkaNo ratings yet
- Prof Jyothi C PattenshettiDocument20 pagesProf Jyothi C PattenshettianushkaNo ratings yet
- Automotive Electronics Laboratory JournalDocument11 pagesAutomotive Electronics Laboratory JournalanushkaNo ratings yet
- Battery First Order PDFDocument16 pagesBattery First Order PDFanushkaNo ratings yet
- What Is An Activity Diagram?Document4 pagesWhat Is An Activity Diagram?Khalil AhmedNo ratings yet
- OSS Note 2658950 - How To Handle and Analyse Workflow Errors For Manage Supplier Invoice AppDocument2 pagesOSS Note 2658950 - How To Handle and Analyse Workflow Errors For Manage Supplier Invoice AppSundarKrishnaNo ratings yet
- Object Constraint Language PPT by MHMDocument15 pagesObject Constraint Language PPT by MHMMaham TahirNo ratings yet
- D80170GC20 sg1Document340 pagesD80170GC20 sg1Misc AccountNo ratings yet
- Airline Documentation FinalDocument86 pagesAirline Documentation FinalSuman RijalNo ratings yet
- Python Class On DebuggingDocument18 pagesPython Class On DebuggingKrishnaprasadNo ratings yet
- G-4 IceDocument12 pagesG-4 IceTejas SuratiNo ratings yet
- Writing Maintainable Unit Tests (Jan Van Ryswyck)Document183 pagesWriting Maintainable Unit Tests (Jan Van Ryswyck)trha at hnepiNo ratings yet
- 924-Article Text-1321-1-10-20180531Document16 pages924-Article Text-1321-1-10-20180531Nur AbdillahNo ratings yet
- 21SC1203 Computational Thinking For Object Oriented Design ModifiedDocument2 pages21SC1203 Computational Thinking For Object Oriented Design ModifiedSHAIK AMEER BABUNo ratings yet
- PDF 71561 ReadingDocument2 pagesPDF 71561 ReadingRavindra JillepalliNo ratings yet
- Athena OnesheeterDocument2 pagesAthena OnesheeterfabioxavNo ratings yet
- Fault Codes - Maxus-Ldv-LdvDocument6 pagesFault Codes - Maxus-Ldv-LdvВячеслав ГлушакNo ratings yet
- NZQN 62.01 62.02Document2 pagesNZQN 62.01 62.02David XueNo ratings yet
- B. Cyber AttackDocument4 pagesB. Cyber AttackDani DanialNo ratings yet
- Ilide - Info Java JSP and Mysql Project On Campus Recruitment System PRDocument201 pagesIlide - Info Java JSP and Mysql Project On Campus Recruitment System PRArvind KumarNo ratings yet
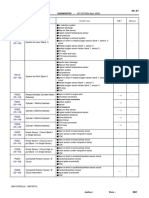
- DTC No. (See Page) Detection Item Trouble Area MIL Memory: DiagnosticsDocument1 pageDTC No. (See Page) Detection Item Trouble Area MIL Memory: DiagnosticsClodoaldo BiassioNo ratings yet
- Lecture Notes 5 SDN Challenges and Scalability - DTTMaiDocument57 pagesLecture Notes 5 SDN Challenges and Scalability - DTTMai20021595 Nguyễn Minh TuấnNo ratings yet
- Using Uipath Robotic Process Automation Adapter Oracle Integration PDFDocument22 pagesUsing Uipath Robotic Process Automation Adapter Oracle Integration PDFSai Deva AkkipalliNo ratings yet
- Principles of Sap Governance Risk and ComplianceDocument3 pagesPrinciples of Sap Governance Risk and ComplianceKandarpGuptaNo ratings yet
- Chapter 2 The Software Process. PressmanDocument38 pagesChapter 2 The Software Process. Pressmaneuros9450% (2)
- ALM Process Set-UpDocument9 pagesALM Process Set-UpPrashant KumarNo ratings yet
- MIS Question BankDocument3 pagesMIS Question BankSubhadeepti GantiNo ratings yet
- PDFDocument2 pagesPDFRAVIKANT100% (1)
- Palletpack 460: Function PackageDocument2 pagesPalletpack 460: Function PackagePrimanedyNo ratings yet
- RNAV Training Manual - Vasa Babic - 2008Document200 pagesRNAV Training Manual - Vasa Babic - 2008Aleš ŠtimecNo ratings yet
- Automating Purchasing Approval Release Strategy ImplementationDocument41 pagesAutomating Purchasing Approval Release Strategy Implementationasadshoaib0% (1)
- SAG WhatsNew LCM-NatONE Sum11 D4Document2 pagesSAG WhatsNew LCM-NatONE Sum11 D4acNo ratings yet
- Question Paper For Slot2Document13 pagesQuestion Paper For Slot2ujjwal kumar singhNo ratings yet