You might also like
- Mtr1a, B CR-2004-06750 12Document1 pageMtr1a, B CR-2004-06750 12davidalvarezsegNo ratings yet
- WEG Indústrias S.A.: Performance Curves Related To SpeedDocument1 pageWEG Indústrias S.A.: Performance Curves Related To SpeedidontlikeebooksNo ratings yet
- Progress MeetingDocument11 pagesProgress MeetingSampath KumarNo ratings yet
- Caracteristicas de Motor ff030pk PDFDocument1 pageCaracteristicas de Motor ff030pk PDFMelanie EstefaniaNo ratings yet
- Perno 2Document2 pagesPerno 2franklin.barrosNo ratings yet
- Prilog 2Document7 pagesPrilog 2Bojan PerovićNo ratings yet
- FC-280SC: Output: 0.1W 4.0W (Approx)Document1 pageFC-280SC: Output: 0.1W 4.0W (Approx)Jordi MarsàNo ratings yet
- FC 140rfsf PDFDocument1 pageFC 140rfsf PDFtomasykNo ratings yet
- Eb Ssep 1.1 13Document1 pageEb Ssep 1.1 13vandana sathishNo ratings yet
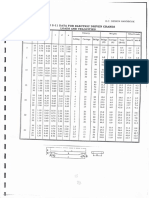
- Manufacturers Pump Curve Data Pump Curves For New ConditionsDocument1 pageManufacturers Pump Curve Data Pump Curves For New Conditionsanto3harrish3fdoNo ratings yet
- Catalogue DL55 North AmericaDocument56 pagesCatalogue DL55 North AmericaJuan Ernesto PerezNo ratings yet
- Document 3 - Stationnarity of DLCACDocument2 pagesDocument 3 - Stationnarity of DLCACjovana.mlnvNo ratings yet
- Development Constructions Ltd. Article IZE Istribution: ASTM D0422Document1 pageDevelopment Constructions Ltd. Article IZE Istribution: ASTM D0422Chowdhury PriodeepNo ratings yet
- Duval Pentagon Calc - MasterDocument1 pageDuval Pentagon Calc - MasterWendi MustafaNo ratings yet
- Des Tec SoniaDocument1 pageDes Tec SoniagalinaciaNo ratings yet
- SampleDocument1 pageSampleGokul VenugopalNo ratings yet
- Sewage Pump Performance CurveDocument5 pagesSewage Pump Performance CurveHossein ForouzanNo ratings yet
- Mtr1a, B CP-2004-06749 12Document1 pageMtr1a, B CP-2004-06749 12davidalvarezsegNo ratings yet
- Crane GirderDocument3 pagesCrane GirderMohamed Alaa ElsheriefNo ratings yet
- Homogenizer ShaftDocument1 pageHomogenizer ShaftNirbhayNo ratings yet
- Universitas MH - Thamrin Tugas PML Syahbuddin SW 110141124 No Absen:34Document7 pagesUniversitas MH - Thamrin Tugas PML Syahbuddin SW 110141124 No Absen:34Ridwan PermanaNo ratings yet
- Copia de MyM Endeudamiento OptimoDocument4 pagesCopia de MyM Endeudamiento OptimoStefany DoloresNo ratings yet
- Design Gudeline For Water Supply Projects (OWWDSE - 2010)Document71 pagesDesign Gudeline For Water Supply Projects (OWWDSE - 2010)AnduNo ratings yet
- FC-280PC SCDocument1 pageFC-280PC SCJerNo ratings yet
- FC4 Standard Units Pressure CurvesDocument12 pagesFC4 Standard Units Pressure CurvesTiago Karina ElisaNo ratings yet
- Ethiopia - Design Gudeline Final - OromiaDocument71 pagesEthiopia - Design Gudeline Final - OromiaEphrem Gizachew100% (15)
- Bus - R: RN - TRDocument1 pageBus - R: RN - TRJIMENEZPSNo ratings yet
- Strain Rosette ReganganDocument16 pagesStrain Rosette ReganganAnnisa Arifandita MifshellaNo ratings yet
- NP 3127 MT 3 Adaptive 439Document8 pagesNP 3127 MT 3 Adaptive 439Juan J SaizNo ratings yet
- Data SheetDocument1 pageData Sheetrosyadi28No ratings yet
- Axial Fan DELTAQFR1212GHEDocument1 pageAxial Fan DELTAQFR1212GHEJosé Edilson da PazNo ratings yet
- Raft Foundation Rigid Analysis - by WANDocument3 pagesRaft Foundation Rigid Analysis - by WANKAI CHUAN CHUNo ratings yet
- Apn 800 Lea137.e1.ed1 20190625Document8 pagesApn 800 Lea137.e1.ed1 20190625anganNo ratings yet
- Restaurante Congressista: D C E B A C DDocument1 pageRestaurante Congressista: D C E B A C DElaineNo ratings yet
- Marginal and Average Product of LaborDocument2 pagesMarginal and Average Product of LaborRudolph FelipeNo ratings yet
- Fuerzas InternasDocument85 pagesFuerzas InternascindyNo ratings yet
- E E E E: Chamfer 0.3 X 45° Any Dimond Knurling Knurling Dia 7.2 Section E-EDocument1 pageE E E E: Chamfer 0.3 X 45° Any Dimond Knurling Knurling Dia 7.2 Section E-EAyush NarangNo ratings yet
- Biconical Antenna 30MHz - 300MHzDocument2 pagesBiconical Antenna 30MHz - 300MHzdiptatokNo ratings yet
- Determination of Prony Series CoefficientDocument2 pagesDetermination of Prony Series CoefficientRith MakaraNo ratings yet
- All Centrilift Pump CURVE CATALOGUEDocument57 pagesAll Centrilift Pump CURVE CATALOGUERidwan PradityaNo ratings yet
- Volumetric Modulated Arc Therapy - Patient Specific QADocument40 pagesVolumetric Modulated Arc Therapy - Patient Specific QAJosé Manuel Lárraga GutiérrezNo ratings yet
- (4)Document1 page(4)Алексей ЗавгороднийNo ratings yet
- Grafik Logaritmik Respon Frekuensi HPF - 40dB: Frekuansi (HZ)Document3 pagesGrafik Logaritmik Respon Frekuensi HPF - 40dB: Frekuansi (HZ)syerlyNo ratings yet
- m19h Baja Net Power 1Document1 pagem19h Baja Net Power 1Srijan VermaNo ratings yet
- BC37 Cummins QSC8.3 600mHp D001Document1 pageBC37 Cummins QSC8.3 600mHp D001Thành DanhNo ratings yet
- Free Online Interactive Psychrometric Chart PDFDocument1 pageFree Online Interactive Psychrometric Chart PDFMayra SandovalNo ratings yet
- Estimated Vee Curves: 0.500 SCR 350 Volts Excitation 2 Pole 3000 RPM 162000 kVA 15000 Volts 0.850 PFDocument1 pageEstimated Vee Curves: 0.500 SCR 350 Volts Excitation 2 Pole 3000 RPM 162000 kVA 15000 Volts 0.850 PFXiangdongNo ratings yet
- Atlas Copco Air Hoists and Trolleys UK tcm795-1621198 PDFDocument8 pagesAtlas Copco Air Hoists and Trolleys UK tcm795-1621198 PDFUrip S. SetyadjiNo ratings yet
- 120 X 120 X 38 MM SERIES: Dimensions DrawingDocument1 page120 X 120 X 38 MM SERIES: Dimensions DrawingrseheNo ratings yet
- Flat Keys and KeywaysDocument1 pageFlat Keys and KeywaysBarNo ratings yet
- 20160919-HGI GL1b (H410) - 010Document1 page20160919-HGI GL1b (H410) - 010hamidbadyNo ratings yet
- Pg240128a DisplayDocument1 pagePg240128a Displaybancadasol03No ratings yet
- Secc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarDocument3 pagesSecc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarRonald Cornejo MarmanilloNo ratings yet
- Secc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarDocument3 pagesSecc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarRonald Cornejo MarmanilloNo ratings yet
- Secc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarDocument3 pagesSecc. Mayor (M) Secc. Menor (M) W/H W (M) H (M) R (Mpa) : Rpilar (Mpa) Ancho Pilar - FospilarRonald Cornejo MarmanilloNo ratings yet
- UPN Secpropsdimsprops Eurocode3 UK 4-24-2019Document8 pagesUPN Secpropsdimsprops Eurocode3 UK 4-24-2019harishram123456No ratings yet
- KBU4,6,8/RS6 SERIES: Single-Phase Silicon Bridge Reverse Voltage - Forward CurrentDocument3 pagesKBU4,6,8/RS6 SERIES: Single-Phase Silicon Bridge Reverse Voltage - Forward CurrentНиколайNo ratings yet
- Shunk Opr 176Document4 pagesShunk Opr 176Nick RivieraNo ratings yet
- Certificado Calibracion Meghometro Megabras 2 - 2018Document6 pagesCertificado Calibracion Meghometro Megabras 2 - 2018pasco pasco0% (1)
- Database Management Systems: Understanding and Applying Database TechnologyFrom EverandDatabase Management Systems: Understanding and Applying Database TechnologyRating: 4 out of 5 stars4/5 (8)
- Atuhp Tuning ProcedureDocument4 pagesAtuhp Tuning Proceduresandeep bagulNo ratings yet
- Cree 1 Watt Dome Led Specification PDFDocument18 pagesCree 1 Watt Dome Led Specification PDFsandeep bagulNo ratings yet
- Pll2068stsa PDFDocument1 pagePll2068stsa PDFsandeep bagulNo ratings yet
- Chaul Khadi Led Flasher Manual Final ManualDocument21 pagesChaul Khadi Led Flasher Manual Final Manualsandeep bagulNo ratings yet
- Manual Dac2202 Antenna Control UnitDocument94 pagesManual Dac2202 Antenna Control Unitsandeep bagulNo ratings yet
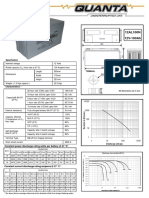
- 100ah-Amaron-Quanta-Battery SPECSDocument2 pages100ah-Amaron-Quanta-Battery SPECSsandeep bagulNo ratings yet
- Systelar Inovations MPPT Solar Charge Controller ManualDocument11 pagesSystelar Inovations MPPT Solar Charge Controller Manualsandeep bagulNo ratings yet
- OMRON OPTICAL SENSOR En-B5w - LB - Series - Users - ManualDocument13 pagesOMRON OPTICAL SENSOR En-B5w - LB - Series - Users - Manualsandeep bagulNo ratings yet
- CWT5002 - 4G Iot GSM Rtu Module PDFDocument6 pagesCWT5002 - 4G Iot GSM Rtu Module PDFsandeep bagulNo ratings yet
- R0110 Ed5.0 Rhythmic Characters of Lights On Aids To Navigation June 2021Document17 pagesR0110 Ed5.0 Rhythmic Characters of Lights On Aids To Navigation June 2021sandeep bagulNo ratings yet
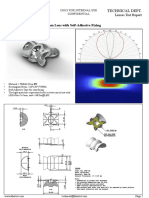
- Design and Evaluation of Uniform LED IlluminationDocument13 pagesDesign and Evaluation of Uniform LED Illuminationsandeep bagulNo ratings yet
- Sac Se125 Dual Treansmitter NDB 5 Nos Rajasthan Site Survey ReportDocument6 pagesSac Se125 Dual Treansmitter NDB 5 Nos Rajasthan Site Survey Reportsandeep bagulNo ratings yet
- Model Course L2.3.1 3 Lights and Marine Lanterns Ed2 Dec 2016 1Document11 pagesModel Course L2.3.1 3 Lights and Marine Lanterns Ed2 Dec 2016 1sandeep bagulNo ratings yet
- Manual NDB Nautel ND500II - Parte 2Document48 pagesManual NDB Nautel ND500II - Parte 2sandeep bagulNo ratings yet
- SYSTEM 4000 MF/HF 150W Operator's Manual: SailorDocument28 pagesSYSTEM 4000 MF/HF 150W Operator's Manual: SailorStas MNo ratings yet
- Bios ManualDocument3 pagesBios Manualsandeep bagulNo ratings yet
- ND500II: 125 WATT Radiobeacon TransmitterDocument134 pagesND500II: 125 WATT Radiobeacon Transmittersandeep bagulNo ratings yet
- Ome56350k4 Felcom15 PDFDocument234 pagesOme56350k4 Felcom15 PDFsandeep bagulNo ratings yet
- 1390-PS-0004 WindObserverII Manual Issue 25Document63 pages1390-PS-0004 WindObserverII Manual Issue 25sandeep bagulNo ratings yet
- Inspections and Audits For Boilers and Pressure VesselsDocument2 pagesInspections and Audits For Boilers and Pressure VesselsNDTInstructorNo ratings yet
- AT100 Series: 10m Marine Transmitting AntennaDocument3 pagesAT100 Series: 10m Marine Transmitting Antennasandeep bagulNo ratings yet
- KTD-00734-J BFlash User ManualDocument19 pagesKTD-00734-J BFlash User Manualsandeep bagulNo ratings yet
- RRE-GOI (Rev 2)Document1 pageRRE-GOI (Rev 2)sandeep bagulNo ratings yet
- KT965 Flex User ManualDocument90 pagesKT965 Flex User Manualsandeep bagulNo ratings yet
- JMA 5200mk2 Field Service Manual PDFDocument172 pagesJMA 5200mk2 Field Service Manual PDFsandeep bagulNo ratings yet
- Navitas EPC BrochureDocument4 pagesNavitas EPC Brochuresandeep bagulNo ratings yet
- ABS GMDSS Survey Check List-TECHDocument8 pagesABS GMDSS Survey Check List-TECHsandeep bagulNo ratings yet
- GMDSS-RPT (Rev.7)Document5 pagesGMDSS-RPT (Rev.7)sandeep bagulNo ratings yet
- ISO 90012015checklist - tcm14 57745 PDFDocument25 pagesISO 90012015checklist - tcm14 57745 PDFDaniela Muñoz SaldiasNo ratings yet
- A Study of Challenges For Fuse Link Protection in The New Generations of Environmentally Friendly VehiclesDocument9 pagesA Study of Challenges For Fuse Link Protection in The New Generations of Environmentally Friendly Vehiclesjk KimNo ratings yet
- Yamuna ExpresswayDocument7 pagesYamuna Expresswaybhagirathl50% (2)
- Matheri G 2013-06 Uon WebsiteDocument5 pagesMatheri G 2013-06 Uon WebsitePal D' ColloNo ratings yet
- Spesifications Forklift FD70Z8Document10 pagesSpesifications Forklift FD70Z8Dewi ElindaNo ratings yet
- VOLT E BYK Pitch DeckDocument13 pagesVOLT E BYK Pitch DeckVolt E BykNo ratings yet
- New AuraDocument8 pagesNew AuraTHARUN SNo ratings yet
- Introduction of Train 18Document80 pagesIntroduction of Train 18carriage drawingNo ratings yet
- NCHRP RPT 350-b PDFDocument113 pagesNCHRP RPT 350-b PDFfouad72No ratings yet
- SanskardhamDroneAcademy BrochureDocument11 pagesSanskardhamDroneAcademy BrochurePragnendra RahevarNo ratings yet
- AC2 Specification SheetDocument4 pagesAC2 Specification SheetWiwa Hernandez DonosoNo ratings yet
- I RRZ+ F) Invn Ix, - (S:: Ievn N . I Rns I Rez+Document3 pagesI RRZ+ F) Invn Ix, - (S:: Ievn N . I Rns I Rez+Lycv Montederamos Asis100% (1)
- Class: +2 Subject: Economics Part: Indian Economic Development Chapter-4 Industry: Features, Problems and Policies Assignment No.: 16-24Document17 pagesClass: +2 Subject: Economics Part: Indian Economic Development Chapter-4 Industry: Features, Problems and Policies Assignment No.: 16-24Harniazdeep SinghNo ratings yet
- ĐỀ CHUYÊN NGỮ 01Document8 pagesĐỀ CHUYÊN NGỮ 01Hieu NguyenNo ratings yet
- Manufacturer: Renault Model: Laguna II (01-05) 1,8 Engine Code: F4P 772 Output: 88 (120) 5750 Tuned For: R-Cat Year: 2001-05 Valid Forever. V8.500Document3 pagesManufacturer: Renault Model: Laguna II (01-05) 1,8 Engine Code: F4P 772 Output: 88 (120) 5750 Tuned For: R-Cat Year: 2001-05 Valid Forever. V8.500Dan DanielNo ratings yet
- Traffic Signal: Project Title:Assesment For Pre-TimedDocument54 pagesTraffic Signal: Project Title:Assesment For Pre-TimedMoses KaswaNo ratings yet
- 1964 US Army Vietnam War Military Police Traffic Control 203pDocument202 pages1964 US Army Vietnam War Military Police Traffic Control 203pwwwsurvivalebookscom100% (1)
- 2008 Mondeo Owner ManualDocument286 pages2008 Mondeo Owner Manualusa_400486% (7)
- Curriculum Vitae: Document Number Date of Issued Expired Date Place of IssuedDocument2 pagesCurriculum Vitae: Document Number Date of Issued Expired Date Place of IssuedalberioNo ratings yet
- Guide Public Parking RedmondDocument2 pagesGuide Public Parking Redmondvrp123No ratings yet
- Export Trade CycleDocument4 pagesExport Trade Cyclepankaj_desardaNo ratings yet
- Vtpi Online TDM EncyclopediaDocument7 pagesVtpi Online TDM EncyclopediaEric Britton (World Streets)No ratings yet
- BMW X6 (G06) .PDF - Asset.1573819832155Document23 pagesBMW X6 (G06) .PDF - Asset.1573819832155Vinko Lemi VidovićNo ratings yet
- Downtown Seattle Transit Capacity White Paper Final DraftDocument19 pagesDowntown Seattle Transit Capacity White Paper Final DraftThe UrbanistNo ratings yet
- File MR. PRADIPKUMAR DHOOTDocument1 pageFile MR. PRADIPKUMAR DHOOTex faplNo ratings yet
- Aitppermit25 Dec 2023 - 1703445967772Document1 pageAitppermit25 Dec 2023 - 1703445967772eprints51No ratings yet
- Compressed Natural GasDocument16 pagesCompressed Natural GasEr Dinesh TambeNo ratings yet
- Recamic A4 4page PDFDocument4 pagesRecamic A4 4page PDFLucky TraderNo ratings yet
- ICTSI Terminal Portfolio 2021 - 051021Document71 pagesICTSI Terminal Portfolio 2021 - 051021Mdjkt IctsiNo ratings yet
- St. Paul University Philippines: Tuguegarao City, Cagayan 3500Document11 pagesSt. Paul University Philippines: Tuguegarao City, Cagayan 3500trixiaNo ratings yet
- Carriage of Persons, Luggage, or Goods Performed by Aircraft For RewardDocument20 pagesCarriage of Persons, Luggage, or Goods Performed by Aircraft For RewardDONNIE RAY SOLONNo ratings yet