You might also like
- Pocketsphinx: A Free, Real-Time Continuous Speech Recognition System For Hand-Held DevicesDocument4 pagesPocketsphinx: A Free, Real-Time Continuous Speech Recognition System For Hand-Held Devicesenaam1977No ratings yet
- Deep Speech 2: End-to-End Speech Recognition in English and MandarinDocument10 pagesDeep Speech 2: End-to-End Speech Recognition in English and MandarinJose Luis Rojas ArandaNo ratings yet
- Google Wakeword Detection 1 PDFDocument5 pagesGoogle Wakeword Detection 1 PDFÖzgür Bora GevrekNo ratings yet
- Experimental Study On Extreme Learning Machine Applications For Speech EnhancementDocument13 pagesExperimental Study On Extreme Learning Machine Applications For Speech EnhancementJBNo ratings yet
- EHaCON - 2019 Paper 8Document20 pagesEHaCON - 2019 Paper 8Himadri Sekhar DuttaNo ratings yet
- S E A T - S: Ample Fficient Daptive EXT TO PeechDocument15 pagesS E A T - S: Ample Fficient Daptive EXT TO PeechGerardo Meza GómezNo ratings yet
- ssw9 PS2-13 WuDocument6 pagesssw9 PS2-13 Wujavilm500No ratings yet
- Automatic Speech Recognition For Launch Control Center Communication Using Recurrent Neural Networks With Data Augmentation and Custom Language ModelDocument7 pagesAutomatic Speech Recognition For Launch Control Center Communication Using Recurrent Neural Networks With Data Augmentation and Custom Language ModelMarcio De Andrade VogtNo ratings yet
- Odyssey 2018 Speaker and Language Recognition WorkshopDocument6 pagesOdyssey 2018 Speaker and Language Recognition Workshopmoodle teacher4No ratings yet
- Lexicon-Free Conversational Speech Recognition With Neural NetworksDocument10 pagesLexicon-Free Conversational Speech Recognition With Neural NetworksNah Mate-pleaseNo ratings yet
- 2018 Interspeech DihardDocument5 pages2018 Interspeech DihardCool NameNo ratings yet
- Improving Speech Intelligibility in Noise Using Environment-Optimized AlgorithmsDocument11 pagesImproving Speech Intelligibility in Noise Using Environment-Optimized AlgorithmsUma ThayaNo ratings yet
- Speaker Recognition System - v1Document7 pagesSpeaker Recognition System - v1amardeepsinghseeraNo ratings yet
- (IJCST-V10I3P32) :rizwan K Rahim, Tharikh Bin Siyad, Muhammed Ameen M.A, Muhammed Salim K.T, Selin MDocument6 pages(IJCST-V10I3P32) :rizwan K Rahim, Tharikh Bin Siyad, Muhammed Ameen M.A, Muhammed Salim K.T, Selin MEighthSenseGroupNo ratings yet
- Paper SpecAugment A Simple Data Augmentation Technique For ASRDocument6 pagesPaper SpecAugment A Simple Data Augmentation Technique For ASRgupnaval2473No ratings yet
- AllenNLP: A Deep Learning Platform for Natural Language ProcessingDocument6 pagesAllenNLP: A Deep Learning Platform for Natural Language ProcessingGiang TừNo ratings yet
- Deep Learning for Speech Emotion Recognition Achieves 96.97% AccuracyDocument5 pagesDeep Learning for Speech Emotion Recognition Achieves 96.97% AccuracyHari HaranNo ratings yet
- Convolutional Recurrent Neural Networks For Small-Footprint Keyword SpottingDocument5 pagesConvolutional Recurrent Neural Networks For Small-Footprint Keyword SpottingViet NguyenNo ratings yet
- An Experimental Study On Speech Enhancement Based On Deep Neural NetworksDocument4 pagesAn Experimental Study On Speech Enhancement Based On Deep Neural NetworksSuleiman ShamasnehNo ratings yet
- ICASSP_2021_DNS_challengeDocument5 pagesICASSP_2021_DNS_challengemeeamitechs20noteNo ratings yet
- Targeted Voice SeparationDocument4 pagesTargeted Voice SeparationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Computer Speech & Language: Gueorgui Pironkov, Sean UN Wood, ST Ephane DupontDocument13 pagesComputer Speech & Language: Gueorgui Pironkov, Sean UN Wood, ST Ephane DupontsridharchandrasekarNo ratings yet
- Computer Speech & Language: Gueorgui Pironkov, Sean UN Wood, ST Ephane DupontDocument13 pagesComputer Speech & Language: Gueorgui Pironkov, Sean UN Wood, ST Ephane DupontsridharchandrasekarNo ratings yet
- Listen, Attend and SpellDocument16 pagesListen, Attend and Spellletthereberock448No ratings yet
- Efficient Classification of Noisy Speech Using Neural NetworksDocument4 pagesEfficient Classification of Noisy Speech Using Neural NetworksBharath ykNo ratings yet
- DeepFilterNet2205 05474Document5 pagesDeepFilterNet2205 05474灯火No ratings yet
- Pocketsphinx: A Free, Real-Time Continuous Speech Recognition System For Hand-Held DevicesDocument4 pagesPocketsphinx: A Free, Real-Time Continuous Speech Recognition System For Hand-Held DevicesThần SấmNo ratings yet
- A Convolutional Recurrent Neural Network for Real-Time Speech EnhancementDocument5 pagesA Convolutional Recurrent Neural Network for Real-Time Speech EnhancementVasanth YannamNo ratings yet
- Easychair Preprint: Adnene Noughreche, Sabri Boulouma and Mohammed BenbaghdadDocument8 pagesEasychair Preprint: Adnene Noughreche, Sabri Boulouma and Mohammed BenbaghdadTran Quang Thai B1708908No ratings yet
- A Comparative Study On Selecting Acoustic Modeling Units in Deep Neural Networks Based Large Vocabulary Chinese Speech RecognitionDocument6 pagesA Comparative Study On Selecting Acoustic Modeling Units in Deep Neural Networks Based Large Vocabulary Chinese Speech RecognitionGalaa GantumurNo ratings yet
- A 1000-Word Vocabulary, Speaker-Independent, Continuous Live-Mode Speech Recognizer Implemented in A Single FPGADocument9 pagesA 1000-Word Vocabulary, Speaker-Independent, Continuous Live-Mode Speech Recognizer Implemented in A Single FPGAGanzorig ChakiNo ratings yet
- Processing Background Noise in Neural Speech Generation: (Domain: Machine Learning)Document12 pagesProcessing Background Noise in Neural Speech Generation: (Domain: Machine Learning)MadhuriNo ratings yet
- Deep Audio-Visual Speech RecognitionDocument13 pagesDeep Audio-Visual Speech RecognitionholissonNo ratings yet
- Google PDFDocument23 pagesGoogle PDFNeurodriverNo ratings yet
- A Neural Attention Model For Speech Command Recognition: A B C CDocument18 pagesA Neural Attention Model For Speech Command Recognition: A B C Cগাজী আব্দুর রাকিবNo ratings yet
- Robust Speaker Recognition Using Speech Enhancement and Attention ModelDocument8 pagesRobust Speaker Recognition Using Speech Enhancement and Attention ModellgaleanocNo ratings yet
- Whisper OpenaiDocument28 pagesWhisper OpenaiChris HeNo ratings yet
- Whisper PDFDocument28 pagesWhisper PDFzakariNo ratings yet
- Robust Processing of Spoken Situated Dialogue: A Study in Human-Robot InteractionFrom EverandRobust Processing of Spoken Situated Dialogue: A Study in Human-Robot InteractionNo ratings yet
- Online Embedding Compression For Text Classification Using Low Rank Matrix FactorizationDocument9 pagesOnline Embedding Compression For Text Classification Using Low Rank Matrix FactorizationHfhdjdNo ratings yet
- 2302.1271Document5 pages2302.1271994132768No ratings yet
- CNN For Phoneme RecognitionDocument6 pagesCNN For Phoneme RecognitionCarlangaslangasNo ratings yet
- Applsci 12 09000 v3 PDFDocument14 pagesApplsci 12 09000 v3 PDFRaviShankar PrasadNo ratings yet
- Se 4Document5 pagesSe 4pravin2275767No ratings yet
- Deep learning in NLP semDocument26 pagesDeep learning in NLP semKevin Raj SNo ratings yet
- Speech Recognition Key Word Spotting Through Image Recognition PDFDocument9 pagesSpeech Recognition Key Word Spotting Through Image Recognition PDFÖzgür Bora GevrekNo ratings yet
- Sequence to Sequence Learning with Neural NetworksDocument9 pagesSequence to Sequence Learning with Neural NetworkssaraNo ratings yet
- Survey On Speech Imitation Using Machine Learning: Rahul Kumar, Jaybrata Chakraborty and Bappaditya ChakrabortyDocument5 pagesSurvey On Speech Imitation Using Machine Learning: Rahul Kumar, Jaybrata Chakraborty and Bappaditya ChakrabortyBappaditya ChakrabortyNo ratings yet
- An Audio Classification Approach Using Feature Extraction Neural Network Classification ApprochDocument6 pagesAn Audio Classification Approach Using Feature Extraction Neural Network Classification Approchks09anoopNo ratings yet
- Easy Over Hard: A Case Study On Deep Learning: Wei Fu, Tim MenziesDocument12 pagesEasy Over Hard: A Case Study On Deep Learning: Wei Fu, Tim MenziesMou SahNo ratings yet
- French To English Translator in PyTorchDocument30 pagesFrench To English Translator in PyTorchDivyanshu NandwaniNo ratings yet
- Toward Multilingual Neural Machine Translation With Universal Encoder and DecoderDocument10 pagesToward Multilingual Neural Machine Translation With Universal Encoder and Decoderspandan guntiNo ratings yet
- Recognizing Speech Commands Using Recurrent Neural Networks with Attention _ by Douglas Coimbra de Andrade _ Towards Data ScienceDocument9 pagesRecognizing Speech Commands Using Recurrent Neural Networks with Attention _ by Douglas Coimbra de Andrade _ Towards Data SciencefcbolarinNo ratings yet
- Challenges in NMT - 1706.03872Document12 pagesChallenges in NMT - 1706.03872Aparajita AggarwalNo ratings yet
- WaveGlow A Flow-Based Generative Network For Speech SynthesisDocument5 pagesWaveGlow A Flow-Based Generative Network For Speech SynthesisEdgar Santos GomesNo ratings yet
- Waveglow: A Flow-Based Generative Network For Speech Synthesis Ryan Prenger, Rafael Valle, Bryan Catanzaro NVIDIA CorporationDocument5 pagesWaveglow: A Flow-Based Generative Network For Speech Synthesis Ryan Prenger, Rafael Valle, Bryan Catanzaro NVIDIA CorporationAbu SufiunNo ratings yet
- Speech Recognition Using Neural Networks: A Review: Dhavale Dhanashri, S.B. DhondeDocument4 pagesSpeech Recognition Using Neural Networks: A Review: Dhavale Dhanashri, S.B. Dhondextfr2215hNo ratings yet
- Este Es 1 Make 01 00031 PDFDocument17 pagesEste Es 1 Make 01 00031 PDFlgaleanocNo ratings yet
- Summary Extraction 4Document12 pagesSummary Extraction 4Sabbir AhmedNo ratings yet
- Deep Speech 2 - End-to-End Speech Recognition in English and MandarinDocument28 pagesDeep Speech 2 - End-to-End Speech Recognition in English and MandarinSubhankar ChakrabortyNo ratings yet
- 1810 04805Document16 pages1810 04805Shubham ChaudharyNo ratings yet
- Attention Is All You NeedDocument15 pagesAttention Is All You NeedShubhamNo ratings yet
- Hybrid CTC/Attention Architecture For End-to-End Speech RecognitionDocument16 pagesHybrid CTC/Attention Architecture For End-to-End Speech RecognitionMEHAK PIPLANINo ratings yet
- A Decomposable Attention Model For Natural Language InferenceDocument7 pagesA Decomposable Attention Model For Natural Language InferenceSubhankar ChakrabortyNo ratings yet
- Discussion Iit Madras Image ProcessingDocument1 pageDiscussion Iit Madras Image ProcessingSubhankar ChakrabortyNo ratings yet
- Deep Learning ApplicationsDocument11 pagesDeep Learning ApplicationsSubhankar ChakrabortyNo ratings yet
- Efficient 3D Object Detection Framework Using Monocular RGB ImagesDocument10 pagesEfficient 3D Object Detection Framework Using Monocular RGB ImagesSubhankar ChakrabortyNo ratings yet
- Galoa Proceedings Pibic 2015 37171 Comparison of THDocument1 pageGaloa Proceedings Pibic 2015 37171 Comparison of THSubhankar ChakrabortyNo ratings yet
- Is the electrostatic force between a point charge and a metallic object always attractiveDocument7 pagesIs the electrostatic force between a point charge and a metallic object always attractiveSatyaki ChowdhuryNo ratings yet
- Assignment 7Document8 pagesAssignment 7Subhankar ChakrabortyNo ratings yet
- Ieee Proof: Signal Processing For Sound Synthesis: Computer-Generated Sounds and Music For AllDocument2 pagesIeee Proof: Signal Processing For Sound Synthesis: Computer-Generated Sounds and Music For AllSubhankar ChakrabortyNo ratings yet
- Klueber Summit Varnasolv FG 050017 PI GB enDocument2 pagesKlueber Summit Varnasolv FG 050017 PI GB enRodrigo Augusto TeixeiraNo ratings yet
- Experiment 5Document8 pagesExperiment 5rastgonikoNo ratings yet
- John Petrucci Touring Rack System: Mesa Mesa MesaDocument1 pageJohn Petrucci Touring Rack System: Mesa Mesa MesaJose AGNo ratings yet
- AAD Lab ManualDocument85 pagesAAD Lab ManualSwastik SinghNo ratings yet
- REV Description Date Originated BY Checked BY Approved BY: 01B IFR - Issued For ReviewDocument10 pagesREV Description Date Originated BY Checked BY Approved BY: 01B IFR - Issued For ReviewAbdur RehmanNo ratings yet
- Kyambogo University: Examination PermitDocument1 pageKyambogo University: Examination PermitAmuronNo ratings yet
- Cellular ManufacturingDocument25 pagesCellular ManufacturingApoorv Mathur100% (1)
- Consolidation Test - Lab ManualDocument5 pagesConsolidation Test - Lab ManualAmira SyazanaNo ratings yet
- UN Manual of Test and Criteria PDFDocument83 pagesUN Manual of Test and Criteria PDFNicolasNo ratings yet
- SpecificationDocument100 pagesSpecificationSUSOVAN BISWASNo ratings yet
- Control M PDFDocument608 pagesControl M PDFlrcapoNo ratings yet
- 7 Area ComputationDocument22 pages7 Area Computationsajid khanNo ratings yet
- Zagi Uav PDFDocument120 pagesZagi Uav PDFFajobi Abeeb100% (1)
- CZ-USA 2011 Product CatalogDocument60 pagesCZ-USA 2011 Product CatalogMario Lopez100% (1)
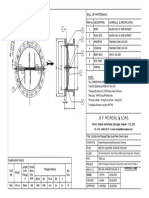
- Dual Plate 800 NB-ModelDocument1 pageDual Plate 800 NB-ModelTanmoy DuttaNo ratings yet
- Pacific Pride F-19 Finished Plan For Flutek-Kawasaki Type Steering Gear Hull No - s059Document215 pagesPacific Pride F-19 Finished Plan For Flutek-Kawasaki Type Steering Gear Hull No - s059htetmyaung5331No ratings yet
- Ultralow-Noise, High PSRR, Fast RF 1-A Low-Dropout Linear RegulatorsDocument18 pagesUltralow-Noise, High PSRR, Fast RF 1-A Low-Dropout Linear RegulatorskarkeraNo ratings yet
- Evc20 Manual en R20160905Document10 pagesEvc20 Manual en R20160905Khiareddine KadhemNo ratings yet
- Solomon Nigatu 0859/16 2. Getawa Melese ..... .0427/16Document32 pagesSolomon Nigatu 0859/16 2. Getawa Melese ..... .0427/16عبدالقادر مكونن سعيدNo ratings yet
- Infiniti G37-09-Coupe5Document612 pagesInfiniti G37-09-Coupe5seregap84100% (1)
- User Manual: Opening Using The Opening Code Generally StructureDocument1 pageUser Manual: Opening Using The Opening Code Generally StructurePetre LeahNo ratings yet
- Blender 3D: Clouds: ExampleDocument5 pagesBlender 3D: Clouds: ExamplemariaNo ratings yet
- Table of Contents: IV 2012 9th & 9th - 12th 2012Document7 pagesTable of Contents: IV 2012 9th & 9th - 12th 2012ali_raza117No ratings yet
- ASTM International Standards Committee On Homeland Security Applications Response Robots (E54.09)Document28 pagesASTM International Standards Committee On Homeland Security Applications Response Robots (E54.09)Namelezz ShadowwNo ratings yet
- Swagelok TubingDocument1 pageSwagelok TubingMmstevens00No ratings yet
- In-Situ Gas AnalyzrDocument4 pagesIn-Situ Gas AnalyzrMuhammad AwaisNo ratings yet
- International Standard: Brazing - Filler MetalsDocument11 pagesInternational Standard: Brazing - Filler Metalsanish nairNo ratings yet
- #9. Sherman - The Contrarian - S Guide To SAG Mill OptimisationDocument12 pages#9. Sherman - The Contrarian - S Guide To SAG Mill OptimisationManolo Sallo ValenzuelaNo ratings yet
- WER6567 TMP AppcompatDocument20 pagesWER6567 TMP AppcompatDuyet MaiNo ratings yet
- 1302 FF6SF6DosingMachine 0Document3 pages1302 FF6SF6DosingMachine 0Fawzi ChakirNo ratings yet