You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Deisel Strength Mass ReportDocument45 pagesThe Deisel Strength Mass ReportNic Prince91% (11)
- 1.4.4 Practice - Modeling - Solving InequalitiesDocument7 pages1.4.4 Practice - Modeling - Solving InequalitiesLyriq WootenNo ratings yet
- Finite Element Method 1. Basic DefinitionDocument18 pagesFinite Element Method 1. Basic Definitionkiran.7610075% (4)
- NewTiger5 SkillsTrainer TeachersbookDocument48 pagesNewTiger5 SkillsTrainer TeachersbookA Legría F DezNo ratings yet
- II.a. Cell The Basic Unit of LifeDocument27 pagesII.a. Cell The Basic Unit of LifeDarwin NoolNo ratings yet
- SFH GK 130222Document23 pagesSFH GK 130222rawandzgoldNo ratings yet
- Science 100: Science, Technology and Society: Lesson 2: Nature of TechnologyDocument9 pagesScience 100: Science, Technology and Society: Lesson 2: Nature of Technology이시연No ratings yet
- ESC 3104 - Course OutlineDocument4 pagesESC 3104 - Course OutlineParbattie DannyNo ratings yet
- Program Studi Profesi Ners Sekolah Tinggi Ilmu Kesehatan Muhammadiyah Samarinda 2017Document49 pagesProgram Studi Profesi Ners Sekolah Tinggi Ilmu Kesehatan Muhammadiyah Samarinda 2017Rhynii HasryyNo ratings yet
- Brand Management: Role of Brand ElementsDocument22 pagesBrand Management: Role of Brand ElementsChibi RajaNo ratings yet
- Improving Dainage System in Malappuram DistrictDocument2 pagesImproving Dainage System in Malappuram DistrictSANAD 20GCE37No ratings yet
- Webinar - Announcement and AgendaDocument2 pagesWebinar - Announcement and AgendaEzequiel RuizNo ratings yet
- Local Media5898135186409141041Document11 pagesLocal Media5898135186409141041Jopay ArorongNo ratings yet
- Design Analysis of An Underground Tunnel in Tamilnadu: Vanuvamalai.A, Jaya K PDocument19 pagesDesign Analysis of An Underground Tunnel in Tamilnadu: Vanuvamalai.A, Jaya K PAlwin AntonyNo ratings yet
- Math6 ST2 Q3Document2 pagesMath6 ST2 Q3mafeh caranogNo ratings yet
- Time Team - Brancaster Roman FortDocument95 pagesTime Team - Brancaster Roman FortWessex Archaeology100% (2)
- SOC101 Quiz 1 and Grand Quiz)Document5 pagesSOC101 Quiz 1 and Grand Quiz)Muhammad AnasNo ratings yet
- Left of BangDocument22 pagesLeft of Bangfirebase556No ratings yet
- (IJCT-V3I4P8) Authors: Mrs. Sangeetha Lakshmi .G, Ms. Arun Kumari .GDocument9 pages(IJCT-V3I4P8) Authors: Mrs. Sangeetha Lakshmi .G, Ms. Arun Kumari .GIjctJournalsNo ratings yet
- Tăng T V NG S D NG Cambridge Ielts 15 by NgocbachDocument3 pagesTăng T V NG S D NG Cambridge Ielts 15 by NgocbachThaiNguyenNo ratings yet
- Quartz VeinsDocument9 pagesQuartz Veinskanwaljeetsingh05No ratings yet
- DRV8243-Q1 Automotive H-Bridge Driver With Integrated Current Sense and DiagnosticsDocument78 pagesDRV8243-Q1 Automotive H-Bridge Driver With Integrated Current Sense and DiagnosticsRakesh SutharNo ratings yet
- PRUEBA YASKAWA ParametersDocument14 pagesPRUEBA YASKAWA ParametersJHONATAN GARCIA MENDEZNo ratings yet
- Peer Tutoring Survey QuestionnaireDocument1 pagePeer Tutoring Survey QuestionnairekcapuzNo ratings yet
- Units 1-3 Sec 3 Question Bank AnswersDocument15 pagesUnits 1-3 Sec 3 Question Bank AnswersMuhammad MaherNo ratings yet
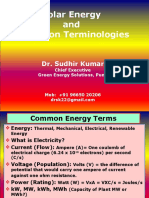
- Solar Energy and Radiation Terminologies: Dr. Sudhir KumarDocument24 pagesSolar Energy and Radiation Terminologies: Dr. Sudhir KumarAyman OsamaNo ratings yet
- Gabungan SemuaDocument38 pagesGabungan SemuaSawawa EgatyaNo ratings yet
- Formulating The HypothesisDocument18 pagesFormulating The HypothesisAnnRubyAlcaideBlandoNo ratings yet
- DLP VMVDocument4 pagesDLP VMVnoera angel montemayorNo ratings yet
- Asexual and Sexual ReproductionDocument14 pagesAsexual and Sexual ReproductionJazel SalesNo ratings yet