You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Atv32 Ats22 2010-06-10Document192 pagesAtv32 Ats22 2010-06-10pocetak1100% (1)
- Magnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersDocument9 pagesMagnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersGurinder SinghNo ratings yet
- Solar Bottle Bulb Small ReportDocument3 pagesSolar Bottle Bulb Small ReportAshok KumarNo ratings yet
- Jennifer New Project (Correction)Document25 pagesJennifer New Project (Correction)HASTINGS EMURASHENo ratings yet
- Catalog Appleton Atx Pre Series 16 Amp Plugs Sockets CoverDocument5 pagesCatalog Appleton Atx Pre Series 16 Amp Plugs Sockets CoverAhmed GhreebNo ratings yet
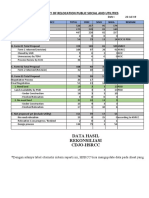
- Rekap Data Fasos Fasum Utilitas r40Document142 pagesRekap Data Fasos Fasum Utilitas r40Vincent EliandiNo ratings yet
- A Finite State Machine Read-Out Chip For Integrated Surface Acoustic Wave SensorsDocument2 pagesA Finite State Machine Read-Out Chip For Integrated Surface Acoustic Wave SensorsDebdeep BanerjeeNo ratings yet
- All About Printed Circuit Board (PCB)Document8 pagesAll About Printed Circuit Board (PCB)Aspire_TechnologyNo ratings yet
- Base Magnetica 6306-1020Document1 pageBase Magnetica 6306-1020Martin Andre AlburquequeNo ratings yet
- Quartz Crystal Oscillator Circuits Design HandbookDocument528 pagesQuartz Crystal Oscillator Circuits Design HandbookAdamNo ratings yet
- Soj Om 2015-09 en PDFDocument70 pagesSoj Om 2015-09 en PDFbaharNo ratings yet
- Service Manual: Ewm RCDocument30 pagesService Manual: Ewm RCRiza AkbarNo ratings yet
- Meglev New1Document19 pagesMeglev New1Thejeswara ReddyNo ratings yet
- Universal CGPA Calculator For EEEDocument16 pagesUniversal CGPA Calculator For EEEG2zapper gamingNo ratings yet
- Simulating A DC DC Boost Converter Using Matlab Part 2Document13 pagesSimulating A DC DC Boost Converter Using Matlab Part 2electrotehnica0% (2)
- Panasonic CS-HZ9RKE-HZ12RKE Sevice Manual EngDocument113 pagesPanasonic CS-HZ9RKE-HZ12RKE Sevice Manual EngVõ Văn DũngNo ratings yet
- Raman SpectrosDocument10 pagesRaman SpectrosSruthiNo ratings yet
- 53K1C7 C08N1Document2 pages53K1C7 C08N1Bao Quoc MaiNo ratings yet
- Magnetic Induction and Electric Potential Solvers For Incompressible MD FlowsDocument32 pagesMagnetic Induction and Electric Potential Solvers For Incompressible MD FlowsaryamesaNo ratings yet
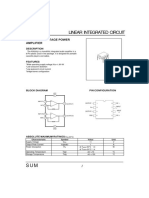
- KA2209Document3 pagesKA2209Charbel TadrosNo ratings yet
- Miniature Aluminum Electrolytic Capacitors: NRSA Series NrsaDocument3 pagesMiniature Aluminum Electrolytic Capacitors: NRSA Series NrsaMinh VuNo ratings yet
- RTMNU-CAPACITOR-DIELECTRICS - B.Sc.-IDocument32 pagesRTMNU-CAPACITOR-DIELECTRICS - B.Sc.-IAhmdNo ratings yet
- 30 Years of Radionics (Kelly) PDFDocument6 pages30 Years of Radionics (Kelly) PDFevandrojsilvaNo ratings yet
- A Guide To Flyback Transformers - CoilcraftDocument5 pagesA Guide To Flyback Transformers - Coilcraftjit genesisNo ratings yet
- Unit 2: Electromagnetic SpectrumDocument8 pagesUnit 2: Electromagnetic SpectrumJoshua SanepaNo ratings yet
- LCD Monitor TV: Service ManualDocument45 pagesLCD Monitor TV: Service ManualIvanLugoNo ratings yet
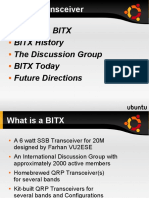
- Bitx Qrpacificon.Document25 pagesBitx Qrpacificon.mario61marioNo ratings yet
- SlideDocument76 pagesSlideAnamiya BhattacharyaNo ratings yet
- Modern PhysicsDocument89 pagesModern PhysicsSammed Khot100% (3)
- ESB-Earthing and Lightning ProtectionDocument13 pagesESB-Earthing and Lightning Protectiondinesh_kp7647No ratings yet