You might also like
- HW4 PDFDocument11 pagesHW4 PDFJonathan MorNo ratings yet
- Optimize Your Gear Drive Design with Proper Material SelectionDocument8 pagesOptimize Your Gear Drive Design with Proper Material SelectionLovely BalajiNo ratings yet
- Me 463-Machine Design 2: Instructor: Engr. Danielle D. Cabana, MengDocument21 pagesMe 463-Machine Design 2: Instructor: Engr. Danielle D. Cabana, MengChristian Breth BurgosNo ratings yet
- Bevel GearDocument1 pageBevel GearAngielou SialanaNo ratings yet
- Design ProblemsDocument13 pagesDesign ProblemsAristotle RiveraNo ratings yet
- Helical Gearing Design Calculations and Stress AnalysisDocument3 pagesHelical Gearing Design Calculations and Stress AnalysisJason CanoNo ratings yet
- 4.1 Question 1: Analysis of Four-Bar Linkage (12 Marks Total)Document2 pages4.1 Question 1: Analysis of Four-Bar Linkage (12 Marks Total)Sh Younus QreshiNo ratings yet
- Table of ContentsDocument2 pagesTable of ContentsSheree Nichole GuillerganNo ratings yet
- Gears: Classification, profiles, advantagesDocument18 pagesGears: Classification, profiles, advantagesSharthak GhoshNo ratings yet
- 2 Flywheel PDFDocument10 pages2 Flywheel PDFMohammed Safuvan KazhungilNo ratings yet
- Design of Helical Springs for Railway Wagon BumperDocument2 pagesDesign of Helical Springs for Railway Wagon BumperBharath PolNo ratings yet
- Chapter 8 - Kinematics of GearsDocument37 pagesChapter 8 - Kinematics of GearskbashokNo ratings yet
- Inverted PendulumDocument9 pagesInverted PendulumMahmoud Samir MahmoudNo ratings yet
- Aços Carbono Construção CivilDocument5 pagesAços Carbono Construção CivilIrvin WilliamNo ratings yet
- Types of Cams GuideDocument21 pagesTypes of Cams GuideHarikrishna ShenoyNo ratings yet
- Centrifugal Compressor Discharge TemperaturesDocument15 pagesCentrifugal Compressor Discharge TemperaturesKenneth SablayNo ratings yet
- Dynamics 1:: SolutionDocument3 pagesDynamics 1:: SolutionJamael AbulaisNo ratings yet
- Shaft Design and Flywheel DimensioningDocument13 pagesShaft Design and Flywheel DimensioningihtishamuddNo ratings yet
- V-Belt Faires Charts and TablesDocument6 pagesV-Belt Faires Charts and TablesChristian Breth BurgosNo ratings yet
- Tutorial Sheet No 1 On Spur GearDocument3 pagesTutorial Sheet No 1 On Spur GearChirayuNo ratings yet
- Chapter 3Document11 pagesChapter 3bernabasNo ratings yet
- Instantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodDocument61 pagesInstantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodKarthikeyanRamanujamNo ratings yet
- Nitc Mechanical Btech Syllabus and CurriculumDocument110 pagesNitc Mechanical Btech Syllabus and Curriculumpikasoc1No ratings yet
- Problems Paired T-TestDocument14 pagesProblems Paired T-TestArghya BoseNo ratings yet
- Gas Turbine Performance CalculationsDocument3 pagesGas Turbine Performance Calculationsumer JuttNo ratings yet
- Belt Tension Steady State CalculationDocument1 pageBelt Tension Steady State CalculationMary Antoinette C. MadoloraNo ratings yet
- Bevel GearsDocument22 pagesBevel GearsNisarg MistryNo ratings yet
- Lab Activity 2Document13 pagesLab Activity 2Kyle GuarinNo ratings yet
- Problem Set MD Day 3Document5 pagesProblem Set MD Day 3DE GUZMAN, MELVIN CARLO A.No ratings yet
- Chapter 9 - Suggested ProblemsDocument10 pagesChapter 9 - Suggested Problemschanmyae toeyeeNo ratings yet
- DME - Anup GoelDocument297 pagesDME - Anup GoelRaghav NagpalNo ratings yet
- Module 1 Sptopics PDFDocument48 pagesModule 1 Sptopics PDFSha SibayanNo ratings yet
- Assignment 4 Reciprocating Air CompressorsDocument8 pagesAssignment 4 Reciprocating Air CompressorsAkshay A KumarNo ratings yet
- AGMA Pitting Geometry FactorDocument1 pageAGMA Pitting Geometry FactormgualdiNo ratings yet
- Scott Russell Mechanism-1 HJKDocument7 pagesScott Russell Mechanism-1 HJKSenthil Selvam0% (1)
- ME306-Fall 2013 - Chapter (3) - Velocities Analysis of Mechanisms PDFDocument13 pagesME306-Fall 2013 - Chapter (3) - Velocities Analysis of Mechanisms PDFmurad_ashourNo ratings yet
- Apolakai Macdes ProblemDocument18 pagesApolakai Macdes Problempablo valorantNo ratings yet
- ME 308: Machine Design II: Second Semester (151) Problem Set # 5 (Section 12-1 To 12-9)Document6 pagesME 308: Machine Design II: Second Semester (151) Problem Set # 5 (Section 12-1 To 12-9)ashutosh pathakNo ratings yet
- Theory of Machines and Mechanisms 4th Edition Solution ManualDocument3 pagesTheory of Machines and Mechanisms 4th Edition Solution Manualعبدالله الخبشNo ratings yet
- Rolling Contact BearingDocument29 pagesRolling Contact BearingBimlendra RayNo ratings yet
- Lab Exercise #4Document12 pagesLab Exercise #4John Glenn Lausin MaticNo ratings yet
- CHAPTER 6: Threaded Members: Bolts ScrewsDocument3 pagesCHAPTER 6: Threaded Members: Bolts ScrewsJohnNo ratings yet
- Stresses & Machine Elements: PROBLEM SET (Topic 1)Document7 pagesStresses & Machine Elements: PROBLEM SET (Topic 1)Elisif DeFairNo ratings yet
- Machine Design 1 HandoutsDocument9 pagesMachine Design 1 HandoutsKenn Earl Bringino VillanuevaNo ratings yet
- MD ShaftDocument18 pagesMD Shaftiftikhar ahmedNo ratings yet
- Assignment 2Document2 pagesAssignment 2Venkitaraj K PNo ratings yet
- Mechanism Design: Quick Return, Timing ChartsDocument6 pagesMechanism Design: Quick Return, Timing ChartsAsim AshrafNo ratings yet
- Assignment 8Document1 pageAssignment 8Ayush NarayanNo ratings yet
- Chapter02 PDFDocument74 pagesChapter02 PDFedis666100% (3)
- Physics Problems on Mechanics and DynamicsDocument34 pagesPhysics Problems on Mechanics and DynamicsHatsady ThonginNo ratings yet
- Rolling Contact BearingsDocument11 pagesRolling Contact BearingsritNo ratings yet
- Kinematics and Dynamics of Machinery SOLUTION MANUAL 8-22Document4 pagesKinematics and Dynamics of Machinery SOLUTION MANUAL 8-22Adnan KhaldunNo ratings yet
- Chapter7 Rev4Document46 pagesChapter7 Rev4PoPoNo ratings yet
- Assignment MSE 3002 - Diffusion and ActivityDocument3 pagesAssignment MSE 3002 - Diffusion and Activityhg lg jhgNo ratings yet
- Chapter 4. Inverse Manipulator KinematicsDocument10 pagesChapter 4. Inverse Manipulator KinematicsSaad Ikram CheemaNo ratings yet
- Everything About PermutationDocument4 pagesEverything About PermutationMohamed MassoudNo ratings yet
- Introduction To Cam Design: Source: Norton, Design of MachineryDocument34 pagesIntroduction To Cam Design: Source: Norton, Design of MachinerySankar SubbiahNo ratings yet
- Solution Manual for The Elements of Polymer Science and EngineeringFrom EverandSolution Manual for The Elements of Polymer Science and EngineeringRating: 4 out of 5 stars4/5 (3)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Arduino Based Autonomous Fire Fighting RobotDocument3 pagesArduino Based Autonomous Fire Fighting RobotVampirul29No ratings yet
- HW 10Document2 pagesHW 10Adnan KhaldunNo ratings yet
- Fuel EconomyDocument19 pagesFuel EconomyAdnan KhaldunNo ratings yet
- Office Supply Request Model 2Document1 pageOffice Supply Request Model 2Adnan KhaldunNo ratings yet
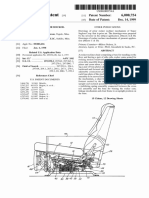
- US006000754ARocker Assembly for Rocker-Recliner ChairsDocument16 pagesUS006000754ARocker Assembly for Rocker-Recliner ChairsAdnan KhaldunNo ratings yet
- 03 17 24Document8 pages03 17 24Adnan KhaldunNo ratings yet
- Binder1 PDFDocument28 pagesBinder1 PDFAdnan KhaldunNo ratings yet
- FileDocument34 pagesFileAdnan KhaldunNo ratings yet
- Install SolidWorks and related appsDocument6 pagesInstall SolidWorks and related appsAdnan KhaldunNo ratings yet
- Kinematics and Dynamics of Machinery SOLUTION MANUAL 8-22Document4 pagesKinematics and Dynamics of Machinery SOLUTION MANUAL 8-22Adnan KhaldunNo ratings yet
- Hazardous Area ClassificationDocument100 pagesHazardous Area Classificationcherif yahyaouiNo ratings yet
- Oil & Gas Rig Roles Functions ProcessesDocument5 pagesOil & Gas Rig Roles Functions ProcessesAnant Ramdial100% (1)
- 18.443 MIT Stats CourseDocument139 pages18.443 MIT Stats CourseAditya JainNo ratings yet
- Physics 8 - EnergyDocument54 pagesPhysics 8 - EnergyHakim AbbasNo ratings yet
- Pressure Variation in Tunnels Sealed Trains PDFDocument258 pagesPressure Variation in Tunnels Sealed Trains PDFsivasankarNo ratings yet
- Four Golden RuleDocument6 pagesFour Golden RulerundyudaNo ratings yet
- Substation Automation HandbookDocument454 pagesSubstation Automation HandbookGiancarloEle100% (6)
- John Constantine Rouge Loner Primordial Orphan Paranormal DetectiveDocument4 pagesJohn Constantine Rouge Loner Primordial Orphan Paranormal DetectiveMirko PrćićNo ratings yet
- RCC Chimneys - CICIND Code PDFDocument23 pagesRCC Chimneys - CICIND Code PDFVasanth KumarNo ratings yet
- Digital Banking in Vietnam: A Guide To MarketDocument20 pagesDigital Banking in Vietnam: A Guide To MarketTrang PhamNo ratings yet
- Next Generation Mobile Network PosterDocument1 pageNext Generation Mobile Network PosterTarik Kazaz100% (2)
- PROPOSED ARFF BUILDINGDocument27 pagesPROPOSED ARFF BUILDINGDale Bryan S DalmacioNo ratings yet
- StuffIt Deluxe Users GuideDocument100 pagesStuffIt Deluxe Users Guidesergio vieiraNo ratings yet
- Adobe Scan 25 Dec 202Document1 pageAdobe Scan 25 Dec 202Jimit ShahNo ratings yet
- Driven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Document15 pagesDriven by Passion. Eager To Grow. If That'S You, Join Bearingpoint!Ana Maria PetreNo ratings yet
- Latihan Soal ADS Bab 14-16Document1 pageLatihan Soal ADS Bab 14-16nadea06_20679973No ratings yet
- BPSM Strategic Management ProcessDocument4 pagesBPSM Strategic Management ProcessFaiyaz panchbhayaNo ratings yet
- Cause and Effect Diagram for Iron in ProductDocument2 pagesCause and Effect Diagram for Iron in ProductHungNo ratings yet
- Eugene A. Nida - Theories of TranslationDocument15 pagesEugene A. Nida - Theories of TranslationYohanes Eko Portable100% (2)
- Dcs Ict2113 (Apr22) - LabDocument6 pagesDcs Ict2113 (Apr22) - LabMarwa NajemNo ratings yet
- Questions Related To Open Channel Flow.Document3 pagesQuestions Related To Open Channel Flow.Mohd AmirNo ratings yet
- Glover 5e SI - Chapter 05Document30 pagesGlover 5e SI - Chapter 05novakiNo ratings yet
- Distributed Oracle EAM - A White PaperDocument38 pagesDistributed Oracle EAM - A White PaperrpgudlaNo ratings yet
- CRT 48-35L PS EuDocument35 pagesCRT 48-35L PS Eujose alvaradoNo ratings yet
- Lecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar AryaDocument9 pagesLecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar Aryaaadesh kumar aryaNo ratings yet
- ARP 598, D, 2016, Microscopic SizingDocument17 pagesARP 598, D, 2016, Microscopic SizingRasoul gholinia kiviNo ratings yet
- Spray Up MoldingDocument2 pagesSpray Up MoldingneelagaantanNo ratings yet
- Microorganisms Friend or Foe Part-5Document28 pagesMicroorganisms Friend or Foe Part-5rajesh duaNo ratings yet
- 1 Shane Fitzsimons - TATA SonsDocument8 pages1 Shane Fitzsimons - TATA Sonsvikashs srivastavaNo ratings yet
- ST5DB Skylake U Platform Block Diagram TitleDocument82 pagesST5DB Skylake U Platform Block Diagram TitleJOSE PAZNo ratings yet