You might also like
- Rammed Earth: Design and Construction Guidelines: Peter Walker, Rowland Keable, Joe Martin, Vasilios ManiatidisDocument11 pagesRammed Earth: Design and Construction Guidelines: Peter Walker, Rowland Keable, Joe Martin, Vasilios Maniatidisrishav paul50% (2)
- The Ackerman Steering PrincipleDocument4 pagesThe Ackerman Steering PrincipleDeb Pradhan100% (1)
- How Car Engines Work PDFDocument3 pagesHow Car Engines Work PDFMiguel Campusano RodriguezNo ratings yet
- CFD of Clubman Roll CagesDocument18 pagesCFD of Clubman Roll CagesJoel ForbesNo ratings yet
- Sufferfest Comparison Chart NEWDocument3 pagesSufferfest Comparison Chart NEWyusuf ravatNo ratings yet
- SOPs Food@work by ZomatoDocument15 pagesSOPs Food@work by ZomatoAMITAVA ROYNo ratings yet
- Automatic Transmision ISUZUDocument258 pagesAutomatic Transmision ISUZUDaniel DiazNo ratings yet
- Calculations For Springs and DampersDocument3 pagesCalculations For Springs and DampersDheeraj SirimallaNo ratings yet
- R.J. Gayler - BG Tuning ManualDocument68 pagesR.J. Gayler - BG Tuning ManualRajat NanchahalNo ratings yet
- Suspension Design ReportDocument4 pagesSuspension Design ReportMeet MehtaNo ratings yet
- Piper Cams Technical AdviceDocument4 pagesPiper Cams Technical AdviceBruno BinNo ratings yet
- Automotive Differentials, ReleaseDocument30 pagesAutomotive Differentials, Releasestefanovicana1No ratings yet
- Flowbench Design2 PDFDocument15 pagesFlowbench Design2 PDFsandy0% (1)
- Fsae Exhaust ReportDocument8 pagesFsae Exhaust ReportGodwin JerryNo ratings yet
- Top Down ScVENGINGDocument20 pagesTop Down ScVENGINGshunmugeshNo ratings yet
- Puma Race Engines - Cylinder Head Modifications - Part 1: Valve SeatsDocument4 pagesPuma Race Engines - Cylinder Head Modifications - Part 1: Valve SeatsRobert DennisNo ratings yet
- Dynojet Research Motorcycle Accessories 250Document31 pagesDynojet Research Motorcycle Accessories 250cesarNo ratings yet
- 3 Automotive - Chassis Design v2 PDFDocument62 pages3 Automotive - Chassis Design v2 PDFAnshul KothariNo ratings yet
- Intake NBSP N NBSP Exhaust+Part1-2Document16 pagesIntake NBSP N NBSP Exhaust+Part1-2Ankit KumarNo ratings yet
- Chapter - 11 - Forced Vibration Single Degree of Freedom SystemsDocument19 pagesChapter - 11 - Forced Vibration Single Degree of Freedom SystemsRakesh BhaskerNo ratings yet
- Chapter 6Document66 pagesChapter 6Arkew Bogale50% (2)
- FSAE Stab Rig DataDocument37 pagesFSAE Stab Rig DataahmadNo ratings yet
- Presentation FatigueDocument22 pagesPresentation FatigueRavi Kiran MeesalaNo ratings yet
- Turbine Engine Lubrication SystemDocument55 pagesTurbine Engine Lubrication SystemAkmal FitriNo ratings yet
- 1RV18ME008Document21 pages1RV18ME008FOODIE USNo ratings yet
- Picanto Suspension SystemDocument38 pagesPicanto Suspension SystemAgus YuliantoNo ratings yet
- Manufacturing Process of The PistonsDocument10 pagesManufacturing Process of The PistonsIvan Muñoz100% (1)
- SAE Measurement j1287 - 199807Document7 pagesSAE Measurement j1287 - 199807Sport moteurNo ratings yet
- Suspension Design by Ravi DeshmukhDocument11 pagesSuspension Design by Ravi DeshmukhsonirocksNo ratings yet
- Turbocharging of Ic EnginesDocument5 pagesTurbocharging of Ic EnginesKrishna MurthyNo ratings yet
- Journal BearingDocument7 pagesJournal BearingFarhan TalibNo ratings yet
- Suspension SubsystemDocument29 pagesSuspension SubsystemAkhilesh KatdareNo ratings yet
- Geometry and Dimensional Tolerances of Engine BearingsDocument8 pagesGeometry and Dimensional Tolerances of Engine BearingsAnonymous K3FaYFlNo ratings yet
- 10 Easy Ways To Increase Engine PerformanceDocument9 pages10 Easy Ways To Increase Engine PerformanceRajes SaraNo ratings yet
- FSAE Data Analysis Day 2 To PrintDocument55 pagesFSAE Data Analysis Day 2 To PrintJorge CorderoNo ratings yet
- VDHS 2 Accl BrakingDocument115 pagesVDHS 2 Accl BrakingSivateja NallamothuNo ratings yet
- Flow in The CylinderDocument24 pagesFlow in The CylinderFernando AndradeNo ratings yet
- Sbs Motorcycle Brake Pads Complete Catalog Moto D RacingDocument636 pagesSbs Motorcycle Brake Pads Complete Catalog Moto D RacingC sNo ratings yet
- 2017 Catalog Compressed PDFDocument140 pages2017 Catalog Compressed PDFDaniel DonosoNo ratings yet
- Cam MechDocument24 pagesCam MechmarcglebNo ratings yet
- 2011 FSAE Design Spec Sheet: Car No. SchoolDocument5 pages2011 FSAE Design Spec Sheet: Car No. SchoolMohammad Parvez RazaNo ratings yet
- KoenigseggDocument11 pagesKoenigseggAzizul Anwar0% (1)
- Car Chassis Dimensions - Dimensions GuideDocument4 pagesCar Chassis Dimensions - Dimensions GuideKarthikeyan NavaneethakrishnanNo ratings yet
- Motor Test InstructionsDocument2 pagesMotor Test Instructionssender2000No ratings yet
- Tech110 PDFDocument4 pagesTech110 PDFPrasetyo AdiNo ratings yet
- Rally 200 ManualDocument35 pagesRally 200 ManualmarineatamNo ratings yet
- Export BrochureDocument30 pagesExport Brochureagustinmisaza100% (1)
- Springs&Dampers Tech Tip 1Document4 pagesSprings&Dampers Tech Tip 1Sankhadeep BhattacharyyaNo ratings yet
- SKF GreaseDocument3 pagesSKF GreaseKumar SwamiNo ratings yet
- ChassisDocument21 pagesChassisphamxuannam2002No ratings yet
- Design and Analysis of Air Intake System For Single Cylinder EngineDocument23 pagesDesign and Analysis of Air Intake System For Single Cylinder EngineEditor IJTSRD100% (1)
- Ten Must Have BooksDocument14 pagesTen Must Have BooksSuyash TandonNo ratings yet
- MotorcycleHelmet ImpactResponse IRCOBI 15 91Document11 pagesMotorcycleHelmet ImpactResponse IRCOBI 15 91deny ponimanNo ratings yet
- Adjustment of The HD-8 Carburetors For The BJ8 Courtesy of Steve ByersDocument13 pagesAdjustment of The HD-8 Carburetors For The BJ8 Courtesy of Steve ByersJ.d. LangleyNo ratings yet
- OvalCrewChief101 v5Document7 pagesOvalCrewChief101 v5darakof258No ratings yet
- SEMINAR REPORT On Rotary EngineDocument43 pagesSEMINAR REPORT On Rotary EngineDhaval Amrutiya100% (6)
- Green Engine: Presented BY: Akshay Kumar 1203240019Document19 pagesGreen Engine: Presented BY: Akshay Kumar 1203240019Mukhil RajasekaranNo ratings yet
- Bus Suspension SystemDocument28 pagesBus Suspension SystemNor Diyana AhmadNo ratings yet
- Steering Geometry and Caster Measurement PDFDocument18 pagesSteering Geometry and Caster Measurement PDFVinayChikNo ratings yet
- Piston Rings and Rider BandsDocument20 pagesPiston Rings and Rider BandsJose Luis RattiaNo ratings yet
- Upgradation and Relocation of Karakorum Highway For Basha Diamer Dam ProjectDocument14 pagesUpgradation and Relocation of Karakorum Highway For Basha Diamer Dam ProjectkuttakhaoNo ratings yet
- Exam Possible Questions: Velocity at HDocument31 pagesExam Possible Questions: Velocity at HJake FryNo ratings yet
- VDHS-0 Vehicle Dynamics PDFDocument109 pagesVDHS-0 Vehicle Dynamics PDFAngeloMaggioNetoNo ratings yet
- PC Rotary - Oil Free NirvanaDocument1 pagePC Rotary - Oil Free NirvanaBùi ViệtNo ratings yet
- Airbus A380 Vs Boeing 747-8Document1 pageAirbus A380 Vs Boeing 747-8Laugh GeneratorNo ratings yet
- Phillip Island: UnderstandDocument3 pagesPhillip Island: UnderstandMeiyappan MuniandyNo ratings yet
- CosmetologyDocument29 pagesCosmetologyLeo Loven LumacangNo ratings yet
- Script For UptDocument9 pagesScript For UptJohn CayabyabNo ratings yet
- 2B Crystallographic Points Directions and PlanesDocument19 pages2B Crystallographic Points Directions and PlanesAhmed AliNo ratings yet
- STATE of The Art Design FrancisDocument11 pagesSTATE of The Art Design FrancisearizabalNo ratings yet
- ELS Quarter2 OrganSystemsDocument28 pagesELS Quarter2 OrganSystemsJustineNo ratings yet
- Chapter 1 Physics and MeasurementDocument54 pagesChapter 1 Physics and MeasurementVănHồ NguyễnNo ratings yet
- Di Dumalo Wala: Mitigation/PreventionDocument1 pageDi Dumalo Wala: Mitigation/PreventionIndradeva Mobby Dick VelitarioNo ratings yet
- Astronomy Unit Resources SchoolpointeDocument17 pagesAstronomy Unit Resources SchoolpointeShekel DeninoNo ratings yet
- 03 SFM Data Processing ExplorationDocument29 pages03 SFM Data Processing ExplorationTegar FauziNo ratings yet
- Savage Worlds - World of The Dead - Player's GuideDocument67 pagesSavage Worlds - World of The Dead - Player's GuideJulio100% (4)
- API 5L Pipes For Pipelines Explained - ProjectmaterialsDocument21 pagesAPI 5L Pipes For Pipelines Explained - ProjectmaterialsMehrshad ShakibNo ratings yet
- The Complexity of Environmental Protection in Sub-Saharan Africa and Reduction of Poverty Kalemba MwambazambiDocument8 pagesThe Complexity of Environmental Protection in Sub-Saharan Africa and Reduction of Poverty Kalemba MwambazambiPearl Irene Joy NiLoNo ratings yet
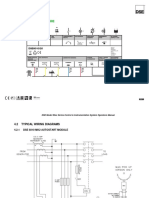
- Dse601020 Wiring Diagram PDFDocument3 pagesDse601020 Wiring Diagram PDFNasredine AlainNo ratings yet
- IG3 Chapter 2Document39 pagesIG3 Chapter 2Dishita AgrawalNo ratings yet
- 40 Item Test Science 6with Key To CorrectionDocument5 pages40 Item Test Science 6with Key To CorrectionvinnNo ratings yet
- Delair DT26 Open Payload Brochure en 201904Document10 pagesDelair DT26 Open Payload Brochure en 201904Wahyu PriyantonoNo ratings yet
- Sheldon Cooper - Quotes - The Big Bang TheoryDocument15 pagesSheldon Cooper - Quotes - The Big Bang TheoryV4RUNNo ratings yet
- F10 - Pvcexcon 2LR8 W20 U0v05 FaDocument1 pageF10 - Pvcexcon 2LR8 W20 U0v05 FaCustomer ServiceNo ratings yet
- Cancoes em LadinoDocument53 pagesCancoes em LadinoAmós Ferreira Barbosa100% (3)
- E84 in TN CMBR GVRD NB 0001 502Document35 pagesE84 in TN CMBR GVRD NB 0001 502Balaji SowrirajanNo ratings yet
- OD2e L5 Tests Unit 2Document2 pagesOD2e L5 Tests Unit 2gilbert silva0% (1)
- Archaeological Survey of Egypt. Part 2Document200 pagesArchaeological Survey of Egypt. Part 2Marek KurkierewiczNo ratings yet
- 0808FT191040 - PCC - FT301Document20 pages0808FT191040 - PCC - FT301Ayush BarskerNo ratings yet