You might also like
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo ratings yet
- Autonomous Docking and Battery Swapping for DronesDocument7 pagesAutonomous Docking and Battery Swapping for DronesAnis SariNo ratings yet
- Conceptual and Preliminary Design of A Long Endurance Electric UAVDocument10 pagesConceptual and Preliminary Design of A Long Endurance Electric UAVumunera2997No ratings yet
- Salim 2010Document20 pagesSalim 2010Mohamed ElkumatiNo ratings yet
- Design and Study of Data and Power Wireless Transfer System For UAVDocument6 pagesDesign and Study of Data and Power Wireless Transfer System For UAVrajaram huptaNo ratings yet
- Improving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptDocument12 pagesImproving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptEsa Bagus Setyo NNo ratings yet
- UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy OptimizationDocument15 pagesUAV-Enabled Wireless Power Transfer: Trajectory Design and Energy OptimizationamarkaswanNo ratings yet
- Inverted_Docking_Station_A_Conceptual_Design_for_aDocument25 pagesInverted_Docking_Station_A_Conceptual_Design_for_akunalNo ratings yet
- EEN 443 Power Distribution Research Assignment Comparing InstallationsDocument4 pagesEEN 443 Power Distribution Research Assignment Comparing InstallationsMohammed ShifulNo ratings yet
- AtlantikSolar ICRA 2015 VFinalDocument8 pagesAtlantikSolar ICRA 2015 VFinalشعاع الخيرNo ratings yet
- Drones y Celdas de HidrogenoDocument11 pagesDrones y Celdas de HidrogenoJalcamNo ratings yet
- CF17 Blimp ShortDocument12 pagesCF17 Blimp ShortPrescoe LungreeNo ratings yet
- Paper #37CDocument6 pagesPaper #37CDrAdel A. ElbasetNo ratings yet
- Smoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemDocument6 pagesSmoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemDrAdel A. ElbasetNo ratings yet
- Design and Implementation of A Tether Powered Hexacopter For Long Endurance MissionsDocument13 pagesDesign and Implementation of A Tether Powered Hexacopter For Long Endurance MissionsSawThet PhyoeNo ratings yet
- Grupo 05-LECTURADocument11 pagesGrupo 05-LECTURAJanon MitnickNo ratings yet
- Design Procedure of A Low-Cost System For Energy Replenishment in A Quadrotor UAV Through A Battery Exchange MechanismDocument22 pagesDesign Procedure of A Low-Cost System For Energy Replenishment in A Quadrotor UAV Through A Battery Exchange MechanismChanaka ChathurangaNo ratings yet
- An Integrated Dynamic Voltage Restorer-Ultracapacitor Design For Improving Power Quality of The Distribution GridDocument9 pagesAn Integrated Dynamic Voltage Restorer-Ultracapacitor Design For Improving Power Quality of The Distribution GridDIVYA PRASOONA CNo ratings yet
- Berkeley Solar DroneDocument1 pageBerkeley Solar DroneAviation/Space History LibraryNo ratings yet
- Experimental Characterization of High Tolerance ToDocument17 pagesExperimental Characterization of High Tolerance Tojhle01394No ratings yet
- Aerial Base Stations Deployment in 6G-kishk_20Document16 pagesAerial Base Stations Deployment in 6G-kishk_20mahmoueddiaaNo ratings yet
- Short-Circuit Modeling of A Wind Power PlantDocument9 pagesShort-Circuit Modeling of A Wind Power Plantamir yazdanNo ratings yet
- Solar Charging Station for E-BikesDocument5 pagesSolar Charging Station for E-BikesDriss OuladabbouNo ratings yet
- IET Renewable Power Gen - 2022 - Timmers - All DC Offshore Wind Farms When Are They More Cost Effective Than AC DesignsDocument13 pagesIET Renewable Power Gen - 2022 - Timmers - All DC Offshore Wind Farms When Are They More Cost Effective Than AC DesignsRianfatah M.No ratings yet
- Wind Turbines With Doubly-Fed Induction Generator SystemDocument8 pagesWind Turbines With Doubly-Fed Induction Generator SystemRicardo Marques DutraNo ratings yet
- Power Devices of Solar AircraftDocument20 pagesPower Devices of Solar AircraftHasnain RezaNo ratings yet
- Automatic Wireless Drone Charging Station Creating Essential Environment For Continuos Drone OperationDocument6 pagesAutomatic Wireless Drone Charging Station Creating Essential Environment For Continuos Drone OperationFrancisco Jose TorreglosaNo ratings yet
- AswdDocument2 pagesAswdShubham KalbandeNo ratings yet
- On The Black Start of Offshore Wind Power Plants With Diode Rectifier BasedDocument10 pagesOn The Black Start of Offshore Wind Power Plants With Diode Rectifier Basednabilhoque601No ratings yet
- An Implementation of Solar PV Array Based Multifunctional EV ChargerDocument13 pagesAn Implementation of Solar PV Array Based Multifunctional EV Chargerltve20ee142No ratings yet
- Reactive Power Sharing Study of An Islanded Microgrid in Digsilent PowerfactoryDocument6 pagesReactive Power Sharing Study of An Islanded Microgrid in Digsilent Powerfactoryali didebanNo ratings yet
- Wits 2019 8723851Document5 pagesWits 2019 8723851sayantikaNo ratings yet
- Landing Pad - 3Document6 pagesLanding Pad - 3stealthcenaNo ratings yet
- Studying of Wind Farm Performance at Zafarana EgyptDocument10 pagesStudying of Wind Farm Performance at Zafarana EgyptmjimenezgNo ratings yet
- Ultra-Lightweight Autonomous Solar Airplane for Continuous FlightDocument12 pagesUltra-Lightweight Autonomous Solar Airplane for Continuous FlightAndrei BadulescuNo ratings yet
- Fuck OffDocument5 pagesFuck Offshyam SaravananNo ratings yet
- Zulfaqar: Journal of Defence Science, Engineering & TechnologyDocument15 pagesZulfaqar: Journal of Defence Science, Engineering & TechnologyOlga OliveiraNo ratings yet
- Paper171 I.banuDocument6 pagesPaper171 I.banuIoan-Viorel BanuNo ratings yet
- Cost Analysis of Electricity Transmission From Offshore Wind Farm by HVDC and Hydrogen Pipeline SystemsDocument5 pagesCost Analysis of Electricity Transmission From Offshore Wind Farm by HVDC and Hydrogen Pipeline SystemsAlexandra DanuNo ratings yet
- Fuzzy controlled crowbar in DFIGDocument5 pagesFuzzy controlled crowbar in DFIGasmelashmebrahtuNo ratings yet
- Lopez RoldanDocument7 pagesLopez RoldanEnriqueGDNo ratings yet
- Chapter 4 - Vehicle To Grid ConnectionDocument13 pagesChapter 4 - Vehicle To Grid ConnectionFrancisco MichelenaNo ratings yet
- ... HVDC Networks For Offshore Wind PowerDocument22 pages... HVDC Networks For Offshore Wind Powerzorlu.elginNo ratings yet
- Performance Validation of A Novel High Speed, eVTOL Compound Helicopter DemonstratorDocument10 pagesPerformance Validation of A Novel High Speed, eVTOL Compound Helicopter DemonstratorOliver RailaNo ratings yet
- Yuan Et AlDocument8 pagesYuan Et AlVicente EstradaNo ratings yet
- La Investigación Sobre Los Sistemas Fotovoltaicos Conectados A La Red Despachables A Gran EscalaDocument8 pagesLa Investigación Sobre Los Sistemas Fotovoltaicos Conectados A La Red Despachables A Gran EscalaserafinNo ratings yet
- Very Long Distance Connection of Gigawattsize Offshore Wind Farms - Extra High-VoltageDocument8 pagesVery Long Distance Connection of Gigawattsize Offshore Wind Farms - Extra High-Voltagemohon_eee03No ratings yet
- Flywheel With Induction MotorDocument6 pagesFlywheel With Induction MotorAndre RangelNo ratings yet
- AC Electrical System1Document26 pagesAC Electrical System1Yadana1No ratings yet
- ReviewDocument10 pagesReview416Angga FadhilNo ratings yet
- Optimal Control of Underwater Kite Power Systems: Lu Is Tiago Paiva Fernando A.C.C. FontesDocument6 pagesOptimal Control of Underwater Kite Power Systems: Lu Is Tiago Paiva Fernando A.C.C. FontesJohn DoeNo ratings yet
- Catapult SystemDocument7 pagesCatapult Systemandrew munyiva0% (1)
- Design, Development, and Initial Testing of A Computationally-Intensive, Long-Endurance Solar-Powered Unmanned AircraftDocument18 pagesDesign, Development, and Initial Testing of A Computationally-Intensive, Long-Endurance Solar-Powered Unmanned Aircraft이재국No ratings yet
- A Review of Power Electronics For Nearshore Wave Energy Converter ApplicationsDocument11 pagesA Review of Power Electronics For Nearshore Wave Energy Converter ApplicationsSreeNo ratings yet
- Powering Aerial Surveillance DronesDocument4 pagesPowering Aerial Surveillance DronesPunyashlok MahapatraNo ratings yet
- GATE Power Systems BookDocument12 pagesGATE Power Systems BookFaniAli100% (1)
- Implementation of A Solid-State Power Controller FDocument6 pagesImplementation of A Solid-State Power Controller FWilliam Jaldin CorralesNo ratings yet
- Paper Ewec06 PDFDocument9 pagesPaper Ewec06 PDFLavanya ChandranNo ratings yet
- Hydro Quebec Large-Scale Real-Time Simulation FINALDocument8 pagesHydro Quebec Large-Scale Real-Time Simulation FINALOsman Berat ÇelebiNo ratings yet
- The Effect of Ethanol Blending On Combustion and Soot Formation in An Optical DISI Engine Using High-Speed ImagingDocument4 pagesThe Effect of Ethanol Blending On Combustion and Soot Formation in An Optical DISI Engine Using High-Speed Imagingفایلجو پروژه و مقالهNo ratings yet
- Selective Extraction of Copper, Mercury, Silver, and Palladium Ions From Water Using Hydrophobic Ionic LiquidsDocument7 pagesSelective Extraction of Copper, Mercury, Silver, and Palladium Ions From Water Using Hydrophobic Ionic Liquidsفایلجو پروژه و مقالهNo ratings yet
- Functionalized IRMOF-3 An Efficient Heterogeneous Catalyst For The Cycloaddition of Allyl Glycidyl Ether and CO2Document6 pagesFunctionalized IRMOF-3 An Efficient Heterogeneous Catalyst For The Cycloaddition of Allyl Glycidyl Ether and CO2فایلجو پروژه و مقالهNo ratings yet
- Developments in Electric Power Supply Configurations For Electrical-Discharge-Machining (EDM)Document6 pagesDevelopments in Electric Power Supply Configurations For Electrical-Discharge-Machining (EDM)فایلجو پروژه و مقالهNo ratings yet
- Tough, Structurally Colored Fabrics Produced by PhotopolymerizationDocument8 pagesTough, Structurally Colored Fabrics Produced by Photopolymerizationفایلجو پروژه و مقالهNo ratings yet
- The Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ MethodDocument6 pagesThe Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ Methodفایلجو پروژه و مقالهNo ratings yet
- Developments in Electric Power Supply Configurations For Electrical-Discharge-Machining (EDM) PDFDocument6 pagesDevelopments in Electric Power Supply Configurations For Electrical-Discharge-Machining (EDM) PDFفایلجو پروژه و مقالهNo ratings yet
- Vaezzadeh 2007Document7 pagesVaezzadeh 2007فایلجو پروژه و مقالهNo ratings yet
- FeNPsReview2016 PDFDocument19 pagesFeNPsReview2016 PDFفایلجو پروژه و مقالهNo ratings yet
- Vaezzadeh2009 PDFDocument7 pagesVaezzadeh2009 PDFفایلجو پروژه و مقالهNo ratings yet
- Vaezzadeh 2007Document7 pagesVaezzadeh 2007فایلجو پروژه و مقالهNo ratings yet
- Vaezzadeh 2007Document7 pagesVaezzadeh 2007فایلجو پروژه و مقالهNo ratings yet
- Fe NPs Review 2016Document19 pagesFe NPs Review 2016فایلجو پروژه و مقالهNo ratings yet
- Catalytic Cracking of Heavy Oil Over A Complex Metal Oxide Catalyst in A Steam AtmosphereDocument11 pagesCatalytic Cracking of Heavy Oil Over A Complex Metal Oxide Catalyst in A Steam Atmosphereفایلجو پروژه و مقالهNo ratings yet
- Activation Energy For The Reverse Eutectoid Reaction in Hypo-Eutectoid Cu-Al AlloysDocument7 pagesActivation Energy For The Reverse Eutectoid Reaction in Hypo-Eutectoid Cu-Al Alloysفایلجو پروژه و مقالهNo ratings yet
- Ultrasonido PaperDocument9 pagesUltrasonido PaperAnonymous jaiyl8iFhBNo ratings yet
- The Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ Method PDFDocument6 pagesThe Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ Method PDFفایلجو پروژه و مقالهNo ratings yet
- A Switched Stiffness Approach For Structural Vibration Control Theory and Real-Time Implementation. Journal of Sound and VibrationDocument17 pagesA Switched Stiffness Approach For Structural Vibration Control Theory and Real-Time Implementation. Journal of Sound and Vibrationفایلجو پروژه و مقالهNo ratings yet
- Catalytic Cracking of Heavy Oil Over A Complex Metal Oxide Catalyst in A Steam AtmosphereDocument11 pagesCatalytic Cracking of Heavy Oil Over A Complex Metal Oxide Catalyst in A Steam Atmosphereفایلجو پروژه و مقالهNo ratings yet
- Aaaaaaa PDFDocument1 pageAaaaaaa PDFفایلجو پروژه و مقالهNo ratings yet
- Ultrasonido PaperDocument9 pagesUltrasonido PaperAnonymous jaiyl8iFhBNo ratings yet
- Selective Extraction of Copper, Mercury, Silver, and Palladium Ions From Water Using Hydrophobic Ionic LiquidsDocument7 pagesSelective Extraction of Copper, Mercury, Silver, and Palladium Ions From Water Using Hydrophobic Ionic Liquidsفایلجو پروژه و مقالهNo ratings yet
- Mesenchymal Stem CellsDocument1 pageMesenchymal Stem Cellsفایلجو پروژه و مقالهNo ratings yet
- The Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ MethodDocument1 pageThe Comparative Studies of Titanium Dioxide in Gas-Phase Ethanol Photocatalytic Oxidation by The FTIR in Situ Methodفایلجو پروژه و مقالهNo ratings yet
- Trunked CapacityDocument7 pagesTrunked CapacityCarlos CortesNo ratings yet
- Model 260 BrochureDocument7 pagesModel 260 BrochureasdsNo ratings yet
- DIY circuit controls BLDC motor without sensorsDocument1 pageDIY circuit controls BLDC motor without sensorsbahriun syahriNo ratings yet
- BLDC MotorsDocument45 pagesBLDC Motorswicked_not_meNo ratings yet
- Maxon EC20 Flat 5wattDocument1 pageMaxon EC20 Flat 5wattElectromateNo ratings yet
- Kollmorgen CatalogDocument202 pagesKollmorgen CatalogZhen Nan WangNo ratings yet
- Adaptive Neural Network Speed Control BLDC MotorDocument13 pagesAdaptive Neural Network Speed Control BLDC Motorvijay coolNo ratings yet
- BLDC Trpezoidal Control PDFDocument35 pagesBLDC Trpezoidal Control PDFAlei El Din AliNo ratings yet
- Motion Technology MotorDocument8 pagesMotion Technology Motorsanu420No ratings yet
- VIT Power Electronics and Drives Syllabus 2012Document18 pagesVIT Power Electronics and Drives Syllabus 2012LinuNo ratings yet
- Speed Control of BLDC Motor Using Adaptive Fuzzy Pid ControllerDocument27 pagesSpeed Control of BLDC Motor Using Adaptive Fuzzy Pid ControllerUgwu ArinzeNo ratings yet
- De WaltDocument52 pagesDe WalttheBlueLightNo ratings yet
- Security System Based On Stepper Motor Control Using Micro ControllerDocument6 pagesSecurity System Based On Stepper Motor Control Using Micro ControllerARVINDNo ratings yet
- Solar Water Pumping Using Zeta Converter and BLDC MotorDocument8 pagesSolar Water Pumping Using Zeta Converter and BLDC MotorSanu SaravanaNo ratings yet
- Solid Works EMS TutorialsDocument353 pagesSolid Works EMS TutorialsAnonymous sAmJfcV100% (1)
- Rotork CMA50Document62 pagesRotork CMA50Doc_LAC100% (1)
- Universal Brushless Servo Driver User Manual enDocument8 pagesUniversal Brushless Servo Driver User Manual enjaimeasisaNo ratings yet
- What Is The Strategic Direction of The Company Over The Last 3 Years? Is The Strategic Direction Likely To Last Till 2025?Document9 pagesWhat Is The Strategic Direction of The Company Over The Last 3 Years? Is The Strategic Direction Likely To Last Till 2025?Prince JoshiNo ratings yet
- Agricultural InformaticsDocument304 pagesAgricultural InformaticsJon London0% (1)
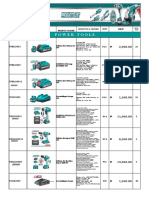
- 20V Power Tool Price ListDocument119 pages20V Power Tool Price ListRochelle SelorioNo ratings yet
- MEEID 204 Special Electrical Machines and DrivesDocument1 pageMEEID 204 Special Electrical Machines and DrivesMani Vannan SoundarapandiyanNo ratings yet
- Horizon Drucker Spectra ManualDocument12 pagesHorizon Drucker Spectra ManualService BlockNo ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- Woodsmith Magazine Guild Edition - June - July 2015Document68 pagesWoodsmith Magazine Guild Edition - June - July 2015OsairManassan100% (9)
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC MotorArif KusumaNo ratings yet
- Exlar Catalog 2008Document140 pagesExlar Catalog 2008TheVagabond HarshalNo ratings yet
- MDS-C1 Series SPECIFICATIONS MANUAL bnp-c3040 (Eng) DDocument265 pagesMDS-C1 Series SPECIFICATIONS MANUAL bnp-c3040 (Eng) DEdimilson RodriguesNo ratings yet
- 48-V, 10-A, High-Frequency PWM, 3-Phase Gan Inverter Reference Design For High-Speed Motor DrivesDocument44 pages48-V, 10-A, High-Frequency PWM, 3-Phase Gan Inverter Reference Design For High-Speed Motor DrivesRatik MittalNo ratings yet
- UNIT7L1 - 2S - Electronically Controlled Fuel SystemsDocument10 pagesUNIT7L1 - 2S - Electronically Controlled Fuel SystemsEbied Yousif AlyNo ratings yet
- Brushless DC Electric MotorDocument8 pagesBrushless DC Electric MotorankitNo ratings yet
- Electrical Motors and Variable Frequency Drives Energy Efficiency Reference GuideDocument257 pagesElectrical Motors and Variable Frequency Drives Energy Efficiency Reference GuideFelipe Gustavo100% (1)