You might also like
- Geometry Formulas: Areas and Perimeters Sketch Area PerimeterDocument2 pagesGeometry Formulas: Areas and Perimeters Sketch Area PerimeterNomer MagnoNo ratings yet
- Geometry Formulas: Areas and Perimeters Sketch Area PerimeterDocument2 pagesGeometry Formulas: Areas and Perimeters Sketch Area PerimeterPrathap Kumar NNo ratings yet
- Geometry Formulas: Areas and Perimeters Sketch Area PerimeterDocument2 pagesGeometry Formulas: Areas and Perimeters Sketch Area PerimeterFrancis Nicole V. QuirozNo ratings yet
- Topic 6 - Vertical Parabolic Curves (Symmetrical)Document4 pagesTopic 6 - Vertical Parabolic Curves (Symmetrical)Nicholas Bonn SingNo ratings yet
- Group SymmetriesDocument2 pagesGroup SymmetriesOoi Zhi KhangNo ratings yet
- PolygonDocument46 pagesPolygonsheykrizzleNo ratings yet
- Geometry Formulas Sheet: S W L A LW L HDocument1 pageGeometry Formulas Sheet: S W L A LW L HJohn Carlo SantosNo ratings yet
- Chapter 10Document9 pagesChapter 10kdalavadi3905No ratings yet
- Engineering Mechanics: 1. Equations of Equilibrium and StaticsDocument21 pagesEngineering Mechanics: 1. Equations of Equilibrium and StaticsMayank KumarNo ratings yet
- 4.3 Rotations TextDocument10 pages4.3 Rotations TextXxShadowGamingNo ratings yet
- Week 9 - Planar KinematicsDocument10 pagesWeek 9 - Planar KinematicsTaoTao at NYCNo ratings yet
- Assignment No.4Document3 pagesAssignment No.4Abhishek NarwariyaNo ratings yet
- Square and RectangleDocument5 pagesSquare and RectangleVishnu PrasadNo ratings yet
- MoebiusDocument16 pagesMoebiussycomore74No ratings yet
- Rotation Solution: EXAMPLE 14: A 1200 LB Sled Is Pulled Along ADocument4 pagesRotation Solution: EXAMPLE 14: A 1200 LB Sled Is Pulled Along AJamael AbulaisNo ratings yet
- Wilmar Villanoche Assignment 3 Abstract AlgebraDocument3 pagesWilmar Villanoche Assignment 3 Abstract AlgebraShaira LopezNo ratings yet
- Circular MotionDocument25 pagesCircular MotionWong Yu Han Amelia (Yijc)No ratings yet
- Formulaes of AreasDocument12 pagesFormulaes of Areasssankar142No ratings yet
- Assignment P-11-09: Problem 7. Problem 8. Problem 9Document4 pagesAssignment P-11-09: Problem 7. Problem 8. Problem 9Jijo SagaiNo ratings yet
- CENG528-2-Projections Geodesy and Coordinate SystemsDocument49 pagesCENG528-2-Projections Geodesy and Coordinate SystemsdrdahmanNo ratings yet
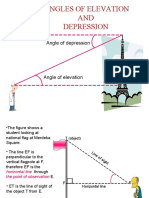
- Angles of Elevation AND DepressionDocument21 pagesAngles of Elevation AND DepressionPau BlasNo ratings yet
- Unit 5 SDDocument64 pagesUnit 5 SDGanapati Girish KamatNo ratings yet
- Definition of PotentialDocument3 pagesDefinition of PotentialIjaz TalibNo ratings yet
- 6 7Document1 page6 7mamhayelyaman elyamanNo ratings yet
- Angles and Tangents of Circles: Students Edition: Rmco StyleDocument31 pagesAngles and Tangents of Circles: Students Edition: Rmco StyleAdlina AdlanNo ratings yet
- LessonslidesCirclesGeometry - Lesson 5Document9 pagesLessonslidesCirclesGeometry - Lesson 5efendy malauNo ratings yet
- Chapter 2Document12 pagesChapter 2Max TNo ratings yet
- CEMKS3 E7 GM4 2 ItDocument3 pagesCEMKS3 E7 GM4 2 ItHan Yuan YapNo ratings yet
- Geometry Formulas: Areas and Perimeters Sketch Area PerimeterDocument2 pagesGeometry Formulas: Areas and Perimeters Sketch Area PerimeterPoppy HowellNo ratings yet
- Understanding Quadrilaterals: PolygonsDocument12 pagesUnderstanding Quadrilaterals: PolygonsBharatNo ratings yet
- 1.gyroscope UpdatedDocument50 pages1.gyroscope UpdatedSIDGURU ME100% (1)
- Work PowerDocument46 pagesWork PowerAnand patilNo ratings yet
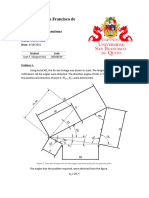
- Corrección Del Exámen - Juan VásquezDocument6 pagesCorrección Del Exámen - Juan VásquezJuan Francisco Vásquez RuizNo ratings yet
- Orbital MotionDocument8 pagesOrbital Motionsundry299No ratings yet
- Orbital MotionDocument8 pagesOrbital Motionsundry299No ratings yet
- Lines and AngleDocument20 pagesLines and AnglejohaanmkNo ratings yet
- Understanding QuadrilateralsDocument12 pagesUnderstanding QuadrilateralsWai MarNo ratings yet
- Sections-Dev-Intersection of Solids-KsrDocument8 pagesSections-Dev-Intersection of Solids-KsrK S ChalapathiNo ratings yet
- t6 GeneratorsDocument4 pagest6 Generatorsanas jawaidNo ratings yet
- (III.D) Linear Functionals II: The Dual Space: R Is Any Linear Transformation RDocument9 pages(III.D) Linear Functionals II: The Dual Space: R Is Any Linear Transformation RFethi BencherkiNo ratings yet
- Circle 02Document10 pagesCircle 02api-3724690No ratings yet
- Circular-Motion TEXTDocument56 pagesCircular-Motion TEXTAnshman SinghNo ratings yet
- Chapter05 Circular Motion SDocument9 pagesChapter05 Circular Motion SeltytanNo ratings yet
- Chapter 1 (Week 1)Document87 pagesChapter 1 (Week 1)Amirah AdlinaNo ratings yet
- Berry Phase PDFDocument53 pagesBerry Phase PDFbiprajit mondalNo ratings yet
- Geometrical ProofDocument4 pagesGeometrical ProofKristie CorpusNo ratings yet
- Aerial Robotics Week2Document150 pagesAerial Robotics Week2tiagosazevedoNo ratings yet
- SadsddsadwaddwdaDocument23 pagesSadsddsadwaddwdaredlegend606No ratings yet
- 2019 WTS 12 Euclidean GeometryDocument105 pages2019 WTS 12 Euclidean GeometryMaria-Regina UkatuNo ratings yet
- Locus of B: Results A' B' 66 MM, 48°, 2 8Document8 pagesLocus of B: Results A' B' 66 MM, 48°, 2 8K V SATHEESHKUMAR MECHNo ratings yet
- Math Resources Geometry FormulasDocument2 pagesMath Resources Geometry FormulasSabir Rahman SafaNo ratings yet
- Math Resources Geometry FormulasDocument2 pagesMath Resources Geometry FormulasMoslem GrimaldiNo ratings yet
- Ip DF PDFDocument19 pagesIp DF PDFJasraj SinghNo ratings yet
- Stresses On Inclined SectionsDocument13 pagesStresses On Inclined Sectionstuyisabe jean boscoNo ratings yet
- 3.1 2D TransformationsDocument6 pages3.1 2D TransformationsMuhammedNo ratings yet
- Jawapan Praktis Fizik T5 2021Document46 pagesJawapan Praktis Fizik T5 2021mamaNo ratings yet
- Review of Vector CalculusDocument53 pagesReview of Vector CalculusAhmed TayehNo ratings yet
- Circular Motion - Work Power EnergyDocument49 pagesCircular Motion - Work Power EnergyBeyond ur imaginationNo ratings yet
- NotaciónDocument4 pagesNotaciónEl Miki : Shitpost y masNo ratings yet