You might also like
- M.Arch Synopsis Structure PDFDocument5 pagesM.Arch Synopsis Structure PDFTeja VedulaNo ratings yet
- Geometry NotesDocument135 pagesGeometry NotesNAVEEN NELLINo ratings yet
- Geometry BasicsDocument136 pagesGeometry Basicsmrs raamNo ratings yet
- Lab Report - Roof Truss ApparatusDocument6 pagesLab Report - Roof Truss ApparatusAltaf100% (2)
- Activity 2: in and Out Objective:: Table 1. Volcano Model and SlopeDocument2 pagesActivity 2: in and Out Objective:: Table 1. Volcano Model and Slopeaurie minnieNo ratings yet
- Coordinate and Trigonometry BashingDocument9 pagesCoordinate and Trigonometry BashingAayush BorkarNo ratings yet
- GE 105 Lecture 5 (STRENGTH OF FIGURE) By: Broddett Bello AbatayoDocument18 pagesGE 105 Lecture 5 (STRENGTH OF FIGURE) By: Broddett Bello AbatayoBroddett Bello Abatayo50% (2)
- Set Pt3 Zon Keramat TerkiniDocument24 pagesSet Pt3 Zon Keramat TerkiniChe Mohd SaribuwanNo ratings yet
- Review GeometryDocument1 pageReview GeometryGabby LabsNo ratings yet
- Tut 3Document6 pagesTut 3NVNo ratings yet
- Vector Calculations in KinematicsDocument36 pagesVector Calculations in KinematicsKarthikeyanRamanujamNo ratings yet
- Kinematic Analysis of Mechanisms (9 Hours) : Theory of Mechanism and MachinesDocument33 pagesKinematic Analysis of Mechanisms (9 Hours) : Theory of Mechanism and MachinesRameshNo ratings yet
- Vectors - Part 2: Products: AB ABDocument4 pagesVectors - Part 2: Products: AB ABnisairfanNo ratings yet
- TG GeometryDocument135 pagesTG GeometryVivekRajuNo ratings yet
- Abhay Mahajan: B.Tech. IIT RoorkeeDocument41 pagesAbhay Mahajan: B.Tech. IIT RoorkeeLakshya SehgalNo ratings yet
- Cambridge O Level: Mathematics (Syllabus D) 4024/02Document21 pagesCambridge O Level: Mathematics (Syllabus D) 4024/02adeelthegr8No ratings yet
- Contents of Mathematics Capsule For RRB NTPC With 100 + Prevous Year Questions by ADDA247Document47 pagesContents of Mathematics Capsule For RRB NTPC With 100 + Prevous Year Questions by ADDA247bharath devasothNo ratings yet
- L10Document4 pagesL10Srushti AgarwalNo ratings yet
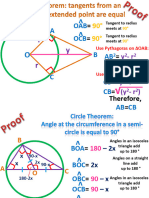
- Circle Theorems Explaining Their Existence (Proofs)Document9 pagesCircle Theorems Explaining Their Existence (Proofs)RNo ratings yet
- 03-01 Lecture Notes Compilation - Vectors and ScalarsDocument6 pages03-01 Lecture Notes Compilation - Vectors and ScalarsElaine BarrosNo ratings yet
- Wilmar Villanoche Assignment 3 Abstract AlgebraDocument3 pagesWilmar Villanoche Assignment 3 Abstract AlgebraShaira LopezNo ratings yet
- Cambridge International General Certificate of Secondary EducationDocument8 pagesCambridge International General Certificate of Secondary EducationChryssa EconomouNo ratings yet
- Vektor: Mathematics For EngineeringDocument17 pagesVektor: Mathematics For EngineeringSyeihan S SyahNo ratings yet
- Kinematic of Machines - Gear 3Document5 pagesKinematic of Machines - Gear 3Safdar Ali NiaziNo ratings yet
- Engineering Mechanics: StaticsDocument44 pagesEngineering Mechanics: StaticsDaya AhmadNo ratings yet
- Vector & 3DDocument50 pagesVector & 3DPRAHLAD BHAKATNo ratings yet
- For Entry at XI STDDocument40 pagesFor Entry at XI STDnikhbiradarNo ratings yet
- Geometry FinalDocument5 pagesGeometry FinalPeter V DatoyNo ratings yet
- 12 Periodic Relationships: Trigonometric FunctionsDocument6 pages12 Periodic Relationships: Trigonometric FunctionsSıla DenizNo ratings yet
- Complementary of Resection Methods: By: Dr. Farsat HeetoDocument16 pagesComplementary of Resection Methods: By: Dr. Farsat HeetoWassan IdreesNo ratings yet
- Quadrilaterals - MATHS - PRACHIDocument15 pagesQuadrilaterals - MATHS - PRACHIPalakNo ratings yet
- Physics 124 Module 1 Introduction 1Document12 pagesPhysics 124 Module 1 Introduction 1G09 Manalo, Jashmine CateNo ratings yet
- Quadrilaterals: Important PointsDocument18 pagesQuadrilaterals: Important PointsyugiNo ratings yet
- Unit No: F3HW 11: 4 Trigonometry Sine and Cosine RulesDocument13 pagesUnit No: F3HW 11: 4 Trigonometry Sine and Cosine RulesBrain SquadNo ratings yet
- A REPORT ON SOLVING TRUSSES USING MATLAB Group 1Document6 pagesA REPORT ON SOLVING TRUSSES USING MATLAB Group 1STOCK MSOWOYANo ratings yet
- Mech3030 T3 2019Document28 pagesMech3030 T3 2019女孩們拆電腦No ratings yet
- HW10Document10 pagesHW10Canji CanjiNo ratings yet
- Circles - Inscribed AnglesDocument18 pagesCircles - Inscribed AnglesJessa M. Certeza25% (4)
- Statics JeffDocument60 pagesStatics JeffssjeyadNo ratings yet
- ME 121: Engineering MechanicsDocument26 pagesME 121: Engineering MechanicsMuhammad FahadNo ratings yet
- JCSF - Mathematics - Trigonometry & Solid Mensuration With SolutionsDocument30 pagesJCSF - Mathematics - Trigonometry & Solid Mensuration With SolutionsEJ Llaneta DimanarigNo ratings yet
- LessonslidesCirclesGeometry - Lesson 4Document9 pagesLessonslidesCirclesGeometry - Lesson 4efendy malauNo ratings yet
- Kinematics of Machines Compiled HariraoDocument94 pagesKinematics of Machines Compiled HariraoUpender DhullNo ratings yet
- Surveying FormulaDocument50 pagesSurveying Formulabro nawalibmat100% (2)
- Term1 GR9 Im P4Document8 pagesTerm1 GR9 Im P4hitarth shahNo ratings yet
- VectorDocument34 pagesVectorImam HossainNo ratings yet
- Vectors WorkbookDocument10 pagesVectors WorkbookElaine zhuNo ratings yet
- The Common-Collector Amplifier Basic Circuit: + 2 1 1 2 BB 1 2 EE E CC + CC C BE BB EE C BB BE C EEDocument9 pagesThe Common-Collector Amplifier Basic Circuit: + 2 1 1 2 BB 1 2 EE E CC + CC C BE BB EE C BB BE C EEdominggoNo ratings yet
- Mathematics I Reference SheetDocument4 pagesMathematics I Reference SheetRaneem DardasNo ratings yet
- Advanced Math 1 Principles and Sample ProblemsDocument5 pagesAdvanced Math 1 Principles and Sample ProblemsKrisha Jean MacalinoNo ratings yet
- Definition of PotentialDocument3 pagesDefinition of PotentialIjaz TalibNo ratings yet
- Scalars and VectorsDocument10 pagesScalars and VectorsNilar LwinNo ratings yet
- The Common-Emitter Amplifier: Basic CircuitDocument9 pagesThe Common-Emitter Amplifier: Basic Circuitmtanveer2008No ratings yet
- Formula SurveyingDocument44 pagesFormula SurveyingStephen Megs Booh MantizaNo ratings yet
- 09 VectorsDocument10 pages09 VectorsCrystal x365No ratings yet
- Circles ProjectDocument4 pagesCircles ProjectKANISHK SajankarNo ratings yet
- Cambridge International General Certificate of Secondary EducationDocument8 pagesCambridge International General Certificate of Secondary EducationKrishiv NandaNo ratings yet
- Barycentric CoordinatesDocument17 pagesBarycentric Coordinatesmszlazak4179No ratings yet
- Parts of A CircleDocument28 pagesParts of A Circlejonathan.casisNo ratings yet
- Corrección Del Exámen - Juan VásquezDocument2 pagesCorrección Del Exámen - Juan VásquezJuan Francisco Vásquez RuizNo ratings yet
- Final Exam Net Present ValueDocument2 pagesFinal Exam Net Present ValueJuan Francisco Vásquez RuizNo ratings yet
- Kaya EquationDocument2 pagesKaya EquationJuan Francisco Vásquez RuizNo ratings yet
- Homework #1 - Juan VásquezDocument9 pagesHomework #1 - Juan VásquezJuan Francisco Vásquez RuizNo ratings yet
- Deber 5 - Juan VásquezDocument2 pagesDeber 5 - Juan VásquezJuan Francisco Vásquez RuizNo ratings yet
- Classwork1 Juanvasquez HTDocument2 pagesClasswork1 Juanvasquez HTJuan Francisco Vásquez RuizNo ratings yet
- DC - Unidades y Dimensiones - Juan VásquezDocument4 pagesDC - Unidades y Dimensiones - Juan VásquezJuan Francisco Vásquez RuizNo ratings yet
- IME4003 Lab01 Group04Document32 pagesIME4003 Lab01 Group04Juan Francisco Vásquez RuizNo ratings yet
- Reporte Ensayo de TracciónDocument20 pagesReporte Ensayo de TracciónJuan Francisco Vásquez RuizNo ratings yet
- Aranceles Puce Quito 2019Document4 pagesAranceles Puce Quito 2019Juan Francisco Vásquez RuizNo ratings yet
- Biovia Materials Studio Dmol: DatasheetDocument3 pagesBiovia Materials Studio Dmol: DatasheettonymailinatorNo ratings yet
- AAMS2203 Make Good AssignmentDocument2 pagesAAMS2203 Make Good AssignmentDekwei YongNo ratings yet
- Krauss, R., Hollier, D., Michelson, A., Foster, H., Kolbowski, S., Buskirk, M., & Buchloh, B. (1994) - The Reception of The Sixties. October, 69, 3.Document20 pagesKrauss, R., Hollier, D., Michelson, A., Foster, H., Kolbowski, S., Buskirk, M., & Buchloh, B. (1994) - The Reception of The Sixties. October, 69, 3.jkNo ratings yet
- Impulse Hammer TechniqueDocument13 pagesImpulse Hammer TechniqueBaraNo ratings yet
- Sma 2201Document35 pagesSma 2201Andrew MutungaNo ratings yet
- BD Solutions PDFDocument31 pagesBD Solutions PDFLoya Yang100% (3)
- National Institute of Technology, DelhiDocument2 pagesNational Institute of Technology, DelhiAdhiraj choudharyNo ratings yet
- PP - PsionicsDocument8 pagesPP - PsionicsLoic DuigouNo ratings yet
- Astrovision May 2020Document81 pagesAstrovision May 2020Poornima100% (1)
- Cambridge IGCSE (9-1) : Physics 0972/12Document20 pagesCambridge IGCSE (9-1) : Physics 0972/12Tristan GrahamNo ratings yet
- High-Quality Performance: Envg-B Enhanced Night Vision Goggle-BinocularDocument2 pagesHigh-Quality Performance: Envg-B Enhanced Night Vision Goggle-BinocularKyle YangNo ratings yet
- GAIL (India) Limited Recruitment of Executive Trainee (By Using GATE-2022 Marks) Frequently Asked Questions Sl. No. Query ReplyDocument7 pagesGAIL (India) Limited Recruitment of Executive Trainee (By Using GATE-2022 Marks) Frequently Asked Questions Sl. No. Query ReplyKaushik PatelNo ratings yet
- First Periodical Test in Science 7 2022 2023Document4 pagesFirst Periodical Test in Science 7 2022 2023Ma. Elizabeth CusiNo ratings yet
- Me8781 MCTDocument2 pagesMe8781 MCTSiva RamanNo ratings yet
- Focus4 2E Vocabulary Quiz Unit5 GroupBDocument1 pageFocus4 2E Vocabulary Quiz Unit5 GroupBТарас ОлейніковNo ratings yet
- Biology by Carvan SSEDocument112 pagesBiology by Carvan SSETayyaba SaeedNo ratings yet
- East Asian ArtDocument4 pagesEast Asian ArtMenchie PaynorNo ratings yet
- What Is Consciousness?Document3 pagesWhat Is Consciousness?Lucia BeatrizNo ratings yet
- Processes of Ideal GasesDocument20 pagesProcesses of Ideal Gasesemmarie llantinoNo ratings yet
- The United Nations in A NutshellDocument8 pagesThe United Nations in A Nutshellfatimkbrova5No ratings yet
- Student Brag Sheet For Letter of RecommendationDocument4 pagesStudent Brag Sheet For Letter of RecommendationBatukaNo ratings yet
- Unit 1 Measurement and Vectors PDFDocument27 pagesUnit 1 Measurement and Vectors PDFSharneet ChettyNo ratings yet
- Week 011-Understanding Data and Ways To Systematically Collect DataDocument13 pagesWeek 011-Understanding Data and Ways To Systematically Collect DataLeona April DarriguezNo ratings yet
- FTIR 7800: SpectrophotometerDocument8 pagesFTIR 7800: SpectrophotometerAfzal SarfarazNo ratings yet
- 09 Runtime-ScriptingDocument11 pages09 Runtime-ScriptingEngenheiro AmoedoNo ratings yet
- Model Regression Interaction - What Is?Document31 pagesModel Regression Interaction - What Is?BHRENO HENRIQUE RIBEIRO VIEIRANo ratings yet
- Daily Lesson PlanDocument15 pagesDaily Lesson PlanNur MaizanNo ratings yet
- D & E - Module 4Document43 pagesD & E - Module 4vivekNo ratings yet