You might also like
- Plumbing Material ListDocument7 pagesPlumbing Material Listhazihappy33% (6)
- (U221.Book) Free PDF MATLAB and SIMULINK For Engineers (Oxford Higher Education) by Agam Kumar Tyagi PDFDocument5 pages(U221.Book) Free PDF MATLAB and SIMULINK For Engineers (Oxford Higher Education) by Agam Kumar Tyagi PDFDrAurobinda BagNo ratings yet
- BARC Previous Year Question Paper 2 For ECEDocument3 pagesBARC Previous Year Question Paper 2 For ECEsai kumar vemparala100% (1)
- Riso RZ Series Error Codes ListDocument22 pagesRiso RZ Series Error Codes ListKhaled Alasfar80% (5)
- MFJFJDocument4 pagesMFJFJShiva Paddam25% (4)
- Linear Integrated Circuits - S. Salivahanan and V. S. K. Bhaaskaran PDFDocument79 pagesLinear Integrated Circuits - S. Salivahanan and V. S. K. Bhaaskaran PDFRaghav75% (4)
- Microcontroller Interview Questions and Answers PDFDocument8 pagesMicrocontroller Interview Questions and Answers PDFbalaji_446913478No ratings yet
- Jane - W - S - Liu - Real - Time - SystemsDocument409 pagesJane - W - S - Liu - Real - Time - Systemssltan_1200100% (2)
- BITS HD ECE QuestionsDocument10 pagesBITS HD ECE QuestionsLokesh Ceg100% (3)
- GATE CLOUD Network Analysis by R K KanodiaDocument126 pagesGATE CLOUD Network Analysis by R K KanodiaAmit150462% (13)
- Solution Manual For Switching and Finite Automata Theory PDFDocument3 pagesSolution Manual For Switching and Finite Automata Theory PDFEvelyn RM22% (9)
- Industrial Instrumentation - K. Krishnaswamy and S. VijayachitraDocument61 pagesIndustrial Instrumentation - K. Krishnaswamy and S. Vijayachitrakiran sagar0% (3)
- Fiber Optics and Optoelectronics - R. P. KhareDocument63 pagesFiber Optics and Optoelectronics - R. P. KhareVijay RajaNo ratings yet
- EI8073 BMI QN BankDocument8 pagesEI8073 BMI QN BankKeerthana SahadevanNo ratings yet
- RLC CircuitDocument47 pagesRLC Circuitbalgopalraju100% (1)
- Digital Signal P Ramesh BabuDocument148 pagesDigital Signal P Ramesh BabuGagan Hy50% (10)
- Switching and Finite Automata Theory - Z. KohaviDocument171 pagesSwitching and Finite Automata Theory - Z. Kohavichakri4740% (3)
- Elaine Rich Kevin Knight Artificial Intelligence SolutionsDocument4 pagesElaine Rich Kevin Knight Artificial Intelligence SolutionsmanimozhiNo ratings yet
- Ashfaq Hussain Electrical Machines PDF FreeDocument4 pagesAshfaq Hussain Electrical Machines PDF FreeShubham Oswal32% (25)
- Power Electronics NewDocument3 pagesPower Electronics NewParas PidurkarNo ratings yet
- PE&I questionbankIIIsemDocument2 pagesPE&I questionbankIIIsemSavita SomaNo ratings yet
- Complex Engineering Problem Problem StatementDocument2 pagesComplex Engineering Problem Problem StatementSyed Afnan GillaniNo ratings yet
- EE - Power Electronics Short NotesDocument34 pagesEE - Power Electronics Short NotesRavinder RangaNo ratings yet
- Digital Communication by Sanjay Sharma Ebook PDFDocument2 pagesDigital Communication by Sanjay Sharma Ebook PDFnikita0% (2)
- Lesson Plan Microprocessor and Micro COntrollerDocument7 pagesLesson Plan Microprocessor and Micro COntrollerRaja Pirian0% (2)
- Micro Controller Lab ManualDocument86 pagesMicro Controller Lab ManualKarthikeyan67% (3)
- Lab Reports-Vlsi LabDocument42 pagesLab Reports-Vlsi LabHuzaifa AhmedNo ratings yet
- Microprocessor 8085 B Ram PDFDocument2 pagesMicroprocessor 8085 B Ram PDFdeveshwar bansal0% (3)
- Ee1352 Electrical Machine Design 2 Marks Question Bank PDFDocument21 pagesEe1352 Electrical Machine Design 2 Marks Question Bank PDFvigneshwaran anguchamyNo ratings yet
- AssignmentsDocument5 pagesAssignments20EEE24 Balaji kanna MNo ratings yet
- Driving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverDocument12 pagesDriving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverAnonymous Nlaa5HNo ratings yet
- Industrial Automation PDFDocument5 pagesIndustrial Automation PDFPrashant KasarNo ratings yet
- Engineering Physics - K. RajagopalDocument68 pagesEngineering Physics - K. RajagopalRita RodriguesNo ratings yet
- Assembly Language ProgramsDocument33 pagesAssembly Language ProgramsPiyush chaudhariNo ratings yet
- Rr311901 Digital Systems DesignDocument8 pagesRr311901 Digital Systems DesignSrinivasa Rao GNo ratings yet
- Digital Controlled System Lab Manual PDFDocument43 pagesDigital Controlled System Lab Manual PDFsoumencha100% (3)
- Examination Based On RfidDocument62 pagesExamination Based On Rfidsudhakar5472100% (2)
- LAB-12 Aim:: Cyclomatic Complexity in Software Testing Is A Testing Metric Used For Measuring TheDocument3 pagesLAB-12 Aim:: Cyclomatic Complexity in Software Testing Is A Testing Metric Used For Measuring The2K19/CO/258 NISHCHAL AGRAWAL0% (1)
- Electronic Devices and CircuitsDocument198 pagesElectronic Devices and CircuitsRamyasri100% (2)
- Digital Electronics Lab Viva QuestionsDocument2 pagesDigital Electronics Lab Viva Questionspramodrp200750% (8)
- Analog Communication Viva QuestionDocument8 pagesAnalog Communication Viva Questionsujithmrinal100% (4)
- Series Resonant Inverter Matlab SimulationDocument15 pagesSeries Resonant Inverter Matlab SimulationGeorgeEdward100% (1)
- Viva Questions May Ask in Electrical Machines LabDocument1 pageViva Questions May Ask in Electrical Machines LabAshalatha2011No ratings yet
- In Circuit EmulatorDocument6 pagesIn Circuit EmulatorJeeva Bharathi0% (1)
- (WWW - Entrance-Exam - Net) - Tata ELXSI Placement Sample Paper 1Document9 pages(WWW - Entrance-Exam - Net) - Tata ELXSI Placement Sample Paper 1karthikNo ratings yet
- Control Systems - A Nagoor Kani PDFDocument60 pagesControl Systems - A Nagoor Kani PDFBalajiNo ratings yet
- Integrated Circuits - K. R. BotkarDocument68 pagesIntegrated Circuits - K. R. Botkarsanamdeep kaur khanguraNo ratings yet
- Modern Electronic Instrumentation and Measurement Techniques A D Helfrick and W D Cooper PDFDocument76 pagesModern Electronic Instrumentation and Measurement Techniques A D Helfrick and W D Cooper PDFXahid Yousaf100% (1)
- A Course in Mechanical Measurements and Instrumentation - A. K. Sawhney and P. SawhneyDocument60 pagesA Course in Mechanical Measurements and Instrumentation - A. K. Sawhney and P. Sawhneyyuva kasiNo ratings yet
- Scilab CompanionDocument74 pagesScilab CompanionHHOLINo ratings yet
- Elementary Numerical Analysis - An Algorithmic Approach - S. D. Conte and C. de BoorDocument51 pagesElementary Numerical Analysis - An Algorithmic Approach - S. D. Conte and C. de BoorAndhy Diaz100% (1)
- Control Systems Engineering - I. J. Nagrath and M. Gopal PDFDocument81 pagesControl Systems Engineering - I. J. Nagrath and M. Gopal PDFJanardhan GannigaNo ratings yet
- Scilab Files Control Systems Engineering by Madan GopalDocument81 pagesScilab Files Control Systems Engineering by Madan GopalGurucharan DasNo ratings yet
- Electrical Measurements and Measuring Instruments - J. B. Gupta PDFDocument265 pagesElectrical Measurements and Measuring Instruments - J. B. Gupta PDFRijit Chakraborty100% (1)
- Electrical Measurements and Measuring Instruments - J. B. Gupta PDFDocument265 pagesElectrical Measurements and Measuring Instruments - J. B. Gupta PDFAnony SNo ratings yet
- Introduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFDocument99 pagesIntroduction To Numerical Methods in Chemical Engineering - P. Ahuja PDFwreckiebNo ratings yet
- Integrated Circuits K. R. BotkarDocument67 pagesIntegrated Circuits K. R. Botkarabhishek799333% (6)
- Signals and Systems - P. R. Rao PDFDocument198 pagesSignals and Systems - P. R. Rao PDFjohnNo ratings yet
- Probability and Statistics For Engineers - Richard L. Scheaffer, Madhuri S. Mulekar, James T. McClaveDocument159 pagesProbability and Statistics For Engineers - Richard L. Scheaffer, Madhuri S. Mulekar, James T. McClaveAmish SharmaNo ratings yet
- Integrated Circuits - K. R. BotkarDocument67 pagesIntegrated Circuits - K. R. BotkarVishav VermaNo ratings yet
- Mechanical Vibration G K Grover PDFDocument58 pagesMechanical Vibration G K Grover PDFbunty25% (4)
- Chennai: July 27Document5 pagesChennai: July 27efasaravananNo ratings yet
- AvadiDocument3 pagesAvadiefasaravananNo ratings yet
- ThanjavurDocument21 pagesThanjavurefasaravananNo ratings yet
- Thanjore: July 30Document21 pagesThanjore: July 30efasaravananNo ratings yet
- ElectricianDocument3 pagesElectricianefasaravanan50% (2)
- Tamil Nadu Teacher Eligibility Test 2017: Attestation by The Gazetted Officer With Seal and DateDocument1 pageTamil Nadu Teacher Eligibility Test 2017: Attestation by The Gazetted Officer With Seal and DateefasaravananNo ratings yet
- Monitoring, Operation and Control of Ion Exchange Plant: Mel HallDocument73 pagesMonitoring, Operation and Control of Ion Exchange Plant: Mel HallefasaravananNo ratings yet
- RASNE Software ManualDocument15 pagesRASNE Software ManualefasaravananNo ratings yet
- Eurotherm 3200series Controllers Datasheet PDFDocument6 pagesEurotherm 3200series Controllers Datasheet PDFefasaravananNo ratings yet
- What Does This Block Diagram Mean?: Process ControlDocument20 pagesWhat Does This Block Diagram Mean?: Process ControlefasaravananNo ratings yet
- Type K Calibration EquationDocument1 pageType K Calibration EquationefasaravananNo ratings yet
- Furnace Atmosphere Control: Eurotherm ControlsDocument5 pagesFurnace Atmosphere Control: Eurotherm ControlsefasaravananNo ratings yet
- Thermocouples Colour Code ChartDocument1 pageThermocouples Colour Code ChartefasaravananNo ratings yet
- Heat/Cool With Carbon Potential or Oxygen Level Monitoring Using The Nanodac Recorder/ControllerDocument4 pagesHeat/Cool With Carbon Potential or Oxygen Level Monitoring Using The Nanodac Recorder/ControllerefasaravananNo ratings yet
- z204 206Document2 pagesz204 206efasaravananNo ratings yet
- CAL 400 4 CatalogueDocument1 pageCAL 400 4 CatalogueefasaravananNo ratings yet
- Diagnostic Trouble Code (DTC) Charts and Descriptions: Procedure Revision Date: 03/29/2006Document147 pagesDiagnostic Trouble Code (DTC) Charts and Descriptions: Procedure Revision Date: 03/29/2006efasaravananNo ratings yet
- Irt/C Irt/C Irt/C Irt/C Infrared Infrared Infrared Infrared Temperature Sensor Temperature Sensor Temperature Sensor Temperature SensorDocument7 pagesIrt/C Irt/C Irt/C Irt/C Infrared Infrared Infrared Infrared Temperature Sensor Temperature Sensor Temperature Sensor Temperature SensorefasaravananNo ratings yet
- Testing Direct Digital Controls (DDC)Document11 pagesTesting Direct Digital Controls (DDC)efasaravananNo ratings yet
- Metravi: Digital T-Rms Multimeter With Wireless Usb PC InterfaceDocument2 pagesMetravi: Digital T-Rms Multimeter With Wireless Usb PC InterfaceefasaravananNo ratings yet
- CAD of Engine Dynamic Test Bed Based On Hybrid Simulation: Zhang Junzhi Lu QingchunDocument6 pagesCAD of Engine Dynamic Test Bed Based On Hybrid Simulation: Zhang Junzhi Lu QingchunefasaravananNo ratings yet
- Compiling A ProjectDocument22 pagesCompiling A ProjectefasaravananNo ratings yet
- Hager Price ListDocument8 pagesHager Price ListSuvashis SahooNo ratings yet
- IRAM2073 Third Edition DHBDocument16 pagesIRAM2073 Third Edition DHBNicolas J Silberay PerezNo ratings yet
- MSC 120 ManualDocument100 pagesMSC 120 ManualEduardo J. KwiecienNo ratings yet
- Hanli Chiller User ManualDocument25 pagesHanli Chiller User ManualKien Nguyen TrungNo ratings yet
- List of Components: Components Working or FunctionDocument6 pagesList of Components: Components Working or FunctionDiyha ChoudhuryNo ratings yet
- Fire Pump SpecificationDocument5 pagesFire Pump SpecificationThiru AnanthNo ratings yet
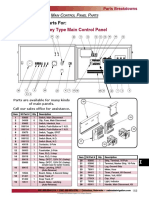
- p169 NI Main Control Panel PartsDocument1 pagep169 NI Main Control Panel PartsFRANCISCO JAVIER RUEDA LOPEZNo ratings yet
- Reed Relays: R56 & 57 SeriesDocument2 pagesReed Relays: R56 & 57 SeriestadilakshmikiranNo ratings yet
- Data Sheet 3VA2110-5MN32-0AA0: ModelDocument5 pagesData Sheet 3VA2110-5MN32-0AA0: Modelcipri1981No ratings yet
- TK 61454-5-Mm Rac 60 Bri Rev.1 Print Date 11-2016Document125 pagesTK 61454-5-Mm Rac 60 Bri Rev.1 Print Date 11-2016Adrian-Laurențiu RădulescuNo ratings yet
- Sensor Manual 1Document11 pagesSensor Manual 1Tame PcAddictNo ratings yet
- RDG100-110 Operating InstructionsDocument2 pagesRDG100-110 Operating Instructionsshahg9948No ratings yet
- Solar PV Installer - ElectricalDocument7 pagesSolar PV Installer - Electricaljaveeed0401100% (2)
- MUL1-R1 Installation Instructions: ACS150, ACS310, ACS320, ACS350 and ACS355Document4 pagesMUL1-R1 Installation Instructions: ACS150, ACS310, ACS320, ACS350 and ACS355Mani RichardNo ratings yet
- Class Xii Physics Practical Lab Manual NewDocument28 pagesClass Xii Physics Practical Lab Manual NewAditya jainNo ratings yet
- JBSS304 UsermanualDocument4 pagesJBSS304 UsermanualIskandar GhinaNo ratings yet
- Training: Pressure Settings of Anti - JammingDocument2 pagesTraining: Pressure Settings of Anti - JammingAlexis Leonardo Vega ReyesNo ratings yet
- Installation and Maintanence Manual PDFDocument36 pagesInstallation and Maintanence Manual PDFPrabhakaran GurunathanNo ratings yet
- Display Unit FHT 6020: Technical Specification ZT-091-0708EDocument12 pagesDisplay Unit FHT 6020: Technical Specification ZT-091-0708EHamzeh AbualrobNo ratings yet
- Actuated Ball Valve 357 D - BDKDocument5 pagesActuated Ball Valve 357 D - BDKfarhanakhtar ansariNo ratings yet
- A CatalogoDocument44 pagesA CatalogocelicamerNo ratings yet
- Technical Codes: Electric/Electronic System T Ath/AdhDocument1 pageTechnical Codes: Electric/Electronic System T Ath/AdhMihajloNo ratings yet
- BODY CONTROL MODULES - Saturn Vue Green Line 2008 - SYSTEM WIRING DIAGRAMSDocument2 pagesBODY CONTROL MODULES - Saturn Vue Green Line 2008 - SYSTEM WIRING DIAGRAMSFredyNo ratings yet
- 4.3 Electric Circuits & ElectricalSafetyDocument33 pages4.3 Electric Circuits & ElectricalSafetymlindigamedzeNo ratings yet
- Fujikura 70SDocument5 pagesFujikura 70SGodyNo ratings yet
- CWFL-2000ANW - BNW Manual - 20220512143626Document15 pagesCWFL-2000ANW - BNW Manual - 20220512143626luis dorantesNo ratings yet
- Avo Valve Data Manual (C)Document2 pagesAvo Valve Data Manual (C)Dejan GorišekNo ratings yet
- INV - ReportDocument88 pagesINV - ReportFincera Home Decor PakistanNo ratings yet