You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Bode PlotDocument13 pagesBode PlotAbeer OwainehNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- EE610: CMOS Analog EE610: CMOS Analog Circuits: L2: MOS Models-2Document53 pagesEE610: CMOS Analog EE610: CMOS Analog Circuits: L2: MOS Models-2Mohit SharmaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- MBPTH Ce Amp PDFDocument7 pagesMBPTH Ce Amp PDFAthifah AnumNo ratings yet
- Linda Chapman: Senior Account ExecutiveDocument1 pageLinda Chapman: Senior Account ExecutiveMohit SharmaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Demystifying 5G RF AsicsDocument5 pagesDemystifying 5G RF AsicsMohit SharmaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- TcadDocument32 pagesTcadtaniostaniosNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Demystifying 5G RF Asics: Joint Summer Faculty Development Programmes 2020Document1 pageDemystifying 5G RF Asics: Joint Summer Faculty Development Programmes 2020Mohit SharmaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Step 1: Download Anaconda A. Visit The Anaconda Downloads PageDocument10 pagesStep 1: Download Anaconda A. Visit The Anaconda Downloads PageMohit SharmaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Unit 5 - Week 3: Assignment 3Document5 pagesUnit 5 - Week 3: Assignment 3Mohit SharmaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
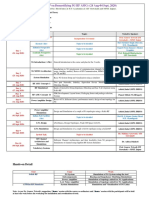
- Online FDP on Demystifying 5G RF ASICsDocument4 pagesOnline FDP on Demystifying 5G RF ASICsMohit SharmaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Unit 4 - Week 2Document5 pagesUnit 4 - Week 2Mohit SharmaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Lect01 PDFDocument3 pagesLect01 PDFMohit SharmaNo ratings yet
- Cadence Layout TipsDocument4 pagesCadence Layout TipsBhargav CoolNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Linda Chapman: Senior Account ExecutiveDocument1 pageLinda Chapman: Senior Account ExecutiveMohit SharmaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Unit 3 - Week 1: Assignment 1Document4 pagesUnit 3 - Week 1: Assignment 1Mohit SharmaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Unit 4 - Week 2Document5 pagesUnit 4 - Week 2Mohit SharmaNo ratings yet
- Unit 2 - Week 0: Assignment - 0Document5 pagesUnit 2 - Week 0: Assignment - 0Mohit SharmaNo ratings yet
- Phase Locked Loop Frequency SynthesizersDocument94 pagesPhase Locked Loop Frequency SynthesizersDebopam BanerjeeNo ratings yet
- StabilityDocument32 pagesStabilityMohit SharmaNo ratings yet
- Linear CircuitsDocument38 pagesLinear CircuitsMohit SharmaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Part1 2 MOSFET PDFDocument45 pagesPart1 2 MOSFET PDFMohit SharmaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Non Equlibrium Green Functions NEGF (Gerhard Klimeck)Document75 pagesNon Equlibrium Green Functions NEGF (Gerhard Klimeck)Mohit SharmaNo ratings yet
- Intro 326Document25 pagesIntro 326Mohit SharmaNo ratings yet
- AcloadDocument23 pagesAcloadMohit SharmaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- S ParametersDocument16 pagesS ParametersNaga LakshmaiahNo ratings yet
- Part1 2 MOSFET PDFDocument45 pagesPart1 2 MOSFET PDFMohit SharmaNo ratings yet
- Small Signal Analysis of A PMOS Transistor: V V V Cox IDocument6 pagesSmall Signal Analysis of A PMOS Transistor: V V V Cox IDuc DucNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
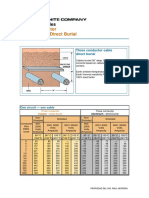
- Three Conductor Underground Direct Burial: Ampacity TablesDocument2 pagesThree Conductor Underground Direct Burial: Ampacity TablesalbertoNo ratings yet
- Ch5-Capacitance and DielectricsDocument46 pagesCh5-Capacitance and Dielectricsmehdii.heidary1366100% (3)
- 03-Physic F5 2018-ElectricityDocument32 pages03-Physic F5 2018-ElectricitySreedrannNo ratings yet
- Surge Propagation in Electrical SystemsDocument5 pagesSurge Propagation in Electrical SystemssamiNo ratings yet
- Hi-Rel-10 KVA UPS ManualDocument28 pagesHi-Rel-10 KVA UPS ManualAbdelwhab Elsafty100% (4)
- Data Sheet 6EP1436-3BA00: InputDocument3 pagesData Sheet 6EP1436-3BA00: InputAjdin BuljubasicNo ratings yet
- WEG Regulador Automatico de Tension Wrga 02 10001284080 Manual EspanolDocument97 pagesWEG Regulador Automatico de Tension Wrga 02 10001284080 Manual EspanolEstalin Ochoa100% (1)
- Alnico Celestion Ruby: General SpecificationsDocument1 pageAlnico Celestion Ruby: General SpecificationsDaniel MambuscayNo ratings yet
- Ge2151 Basic Electrical and Electronics Engineering L T P CDocument1 pageGe2151 Basic Electrical and Electronics Engineering L T P CKannan Kathiravan100% (1)
- Fundamentals of Fluid FlowDocument60 pagesFundamentals of Fluid Flowb4rfNo ratings yet
- Diode Characteristic Curve ExperimentDocument5 pagesDiode Characteristic Curve ExperimentAyeshaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Brochure For PhysicsDocument2 pagesBrochure For Physicsapi-24281927350% (2)
- Electric Basic Measure ExperimentDocument10 pagesElectric Basic Measure ExperimentselniNo ratings yet
- Is 3043 - 2018Document108 pagesIs 3043 - 2018Naimish Rathod100% (2)
- Load Test On High Current Low Voltage Inverters in Back-to-Back ConnectionDocument43 pagesLoad Test On High Current Low Voltage Inverters in Back-to-Back ConnectionSadie WilliamsonNo ratings yet
- Physics CHP 4 Test#3Document2 pagesPhysics CHP 4 Test#3parsaNo ratings yet
- SKFDocument56 pagesSKFsile8100% (1)
- Scattering of Waves by WedgesDocument231 pagesScattering of Waves by WedgesvpkvikasNo ratings yet
- K. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiDocument2 pagesK. S. R. College of Engineering, Tiruchengode - 637 215: Internal Assesement Test IiVeeramaniNo ratings yet
- Reactive Power Compensation Technologies PDFDocument21 pagesReactive Power Compensation Technologies PDFTovar ArmandoNo ratings yet
- 199 Unit-1 Quantum MechanicsDocument10 pages199 Unit-1 Quantum MechanicsSarath ChanduNo ratings yet
- Oscillations in Planar Dynamic Systems - Compress PDFDocument332 pagesOscillations in Planar Dynamic Systems - Compress PDF杨畅No ratings yet
- Development of An EV Drivetrain For A Small Car: Ambarish KulkarniDocument341 pagesDevelopment of An EV Drivetrain For A Small Car: Ambarish KulkarniSung Ryoung LimNo ratings yet
- Siemens: 1. General Data and InformationDocument2 pagesSiemens: 1. General Data and InformationDanish AfzalNo ratings yet
- Chapter 6 Power Factor Improvement (Compatibility Mode)Document53 pagesChapter 6 Power Factor Improvement (Compatibility Mode)katlegoNo ratings yet
- Assignment No 1Document8 pagesAssignment No 1Debajit MalakarNo ratings yet
- Bedini Simple Science Fair Motor Thanks ToDocument8 pagesBedini Simple Science Fair Motor Thanks ToYorsh TorresNo ratings yet
- Characteristics of PN Junction Diode and Zener DiodeDocument7 pagesCharacteristics of PN Junction Diode and Zener DiodeMegha UmeshaNo ratings yet
- Gyroscope and GyrocompassDocument26 pagesGyroscope and Gyrocompassdragonborn dragonbornNo ratings yet