You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Ohm's Law and Electric CurrentDocument34 pagesOhm's Law and Electric CurrentSaravanan T YNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Ee105 6Document28 pagesEe105 6Saravanan T YNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ee105 5Document32 pagesEe105 5Saravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Introduction to Basic Principles of Electricity and Ohm's LawDocument26 pagesIntroduction to Basic Principles of Electricity and Ohm's LawSaravanan T YNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Control of Induction MotorsDocument80 pagesControl of Induction MotorsSaravanan T YNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Department of Technical Education Andhra PradeshDocument36 pagesDepartment of Technical Education Andhra PradeshSaravanan T YNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
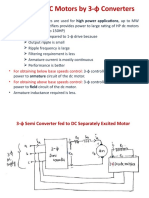
- Control of DC Motors by 3-φ ConvertersDocument16 pagesControl of DC Motors by 3-φ ConvertersSaravanan T YNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ee105 1Document32 pagesEe105 1Saravanan T YNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Control of DC Motors by 1-φ ConvertersDocument6 pagesControl of DC Motors by 1-φ ConvertersSaravanan T YNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Electric Power Systems: An OverviewDocument29 pagesElectric Power Systems: An OverviewSaravanan T YNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Circuit WorkSheet ChallengeDocument9 pagesCircuit WorkSheet ChallengeSaravanan T YNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Speed Control of Synchronous MotorsDocument12 pagesSpeed Control of Synchronous MotorsSaravanan T YNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDocument18 pagesInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YNo ratings yet
- Electrical Machine 1Document10 pagesElectrical Machine 1Irfan NaqviNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- Unit-1 - DC & AC Circuits PDFDocument60 pagesUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Ii. Iii I: AcademicDocument1 pageIi. Iii I: AcademicSaravanan T YNo ratings yet
- 4 - Control of Induction MotorDocument23 pages4 - Control of Induction MotorSaravanan T YNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Narayana Engineering College Power Semiconductor Drives SubjectiveDocument7 pagesNarayana Engineering College Power Semiconductor Drives SubjectiveSaravanan T YNo ratings yet
- Synchronous Generators NotesDocument75 pagesSynchronous Generators NotesSaravanan T Y100% (1)
- Arm7 Scrib1Document72 pagesArm7 Scrib1Saravanan T YNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- TimersDocument51 pagesTimersSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Document9 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Saravanan T YNo ratings yet
- Model P282 With PD Sensor For 40 To 80 NBDocument1 pageModel P282 With PD Sensor For 40 To 80 NBGanesh MulyaNo ratings yet
- Eim Diagnostic1Document2 pagesEim Diagnostic1Michael Angelo ChuaNo ratings yet
- Bare Copper Conductor: Standards / Testing SpecificationsDocument4 pagesBare Copper Conductor: Standards / Testing SpecificationskjkljkljlkjljlkNo ratings yet
- TLE ELECTRONICS With AnswersDocument1 pageTLE ELECTRONICS With AnswersCOA DSWD7No ratings yet
- SDD Series AC Servo Driver ManualDocument99 pagesSDD Series AC Servo Driver ManualAntonio PassosNo ratings yet
- Gef 4647aDocument8 pagesGef 4647aGabrielaNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product Specificationcarlos eduardo peçanhaNo ratings yet
- 255 275 W Output Power: 60 CellsDocument2 pages255 275 W Output Power: 60 CellsDavid Alessandro EspinosaNo ratings yet
- Rigid Conduit Locknut Bushing GuideDocument4 pagesRigid Conduit Locknut Bushing Guidesieged_rj3165No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- LossesDocument14 pagesLossesNANDHAKUMAR ANo ratings yet
- 1030365249373-Mvax12-91 en 0902Document8 pages1030365249373-Mvax12-91 en 0902s_shresthaNo ratings yet
- Senzor OpticDocument4 pagesSenzor Opticaaaa2234100% (1)
- 2017 Code Changes SummaryDocument17 pages2017 Code Changes SummaryKim LucenaNo ratings yet
- Nexans XT Medium Voltage Single Core...Document15 pagesNexans XT Medium Voltage Single Core...Mathias CanalesNo ratings yet
- Irfi 3205 Power MosfetDocument9 pagesIrfi 3205 Power MosfetAndy WilsonNo ratings yet
- Voltage Shunt Feedback AmplifierDocument18 pagesVoltage Shunt Feedback AmplifierHimanshu Singh100% (1)
- Assembling The Arduino Sun Harvester Electronics SystemDocument6 pagesAssembling The Arduino Sun Harvester Electronics SystemBunPământNo ratings yet
- Contactor de Barrote SerieR - BRDocument8 pagesContactor de Barrote SerieR - BRVictor TaveraNo ratings yet
- Ke300a 01 Ae300 01 Ke300p Solar Pump Inverter User Manual v5Document73 pagesKe300a 01 Ae300 01 Ke300p Solar Pump Inverter User Manual v5ابو حمزةNo ratings yet
- Masterpact NT and NW Universal Power Circuit Breakers: Catalog 0613CT0001R09/10Document10 pagesMasterpact NT and NW Universal Power Circuit Breakers: Catalog 0613CT0001R09/10Gaurav MaithilNo ratings yet
- CD40174BC - CD40175BC Hex D-Type Flip-Flop - Quad D-Type Flip-FlopDocument7 pagesCD40174BC - CD40175BC Hex D-Type Flip-Flop - Quad D-Type Flip-FlopCristian MancholaNo ratings yet
- ING-ABB-GE-BAWER-CCM-PTAP-BateriaColon-Planos - Tipicos-BomReport-LA-MCC BowellDocument5 pagesING-ABB-GE-BAWER-CCM-PTAP-BateriaColon-Planos - Tipicos-BomReport-LA-MCC BowellCarla MaldonadoNo ratings yet
- Model CP 35 Control Panel Data Sheet A6V10238722 Us enDocument4 pagesModel CP 35 Control Panel Data Sheet A6V10238722 Us enSalley BukhariNo ratings yet
- CAPACITORS in PARALLELDocument18 pagesCAPACITORS in PARALLELJennifer MagangoNo ratings yet
- Guide RoHS Exemption List PC GD 180717Document32 pagesGuide RoHS Exemption List PC GD 180717AimanWaliNo ratings yet
- BD540, BD540A, BD540B, BD540C PNP Silicon Power TransistorsDocument6 pagesBD540, BD540A, BD540B, BD540C PNP Silicon Power TransistorsClaudinei BarbosaNo ratings yet
- SMPS TutorialDocument18 pagesSMPS TutorialUmasankar Peri100% (1)
- EP-107 Infrared Finger Clip Sensor SpecsDocument1 pageEP-107 Infrared Finger Clip Sensor SpecstapoiuNo ratings yet
- FSB-200 (A) and FSB-200S (A) : Single-Ended, Reflector-Type Addressable Beam Smoke DetectorDocument4 pagesFSB-200 (A) and FSB-200S (A) : Single-Ended, Reflector-Type Addressable Beam Smoke DetectorGustavo Márquez TorresNo ratings yet
- Revised Schematic (C) Copyright 1994-2004 PDFDocument1 pageRevised Schematic (C) Copyright 1994-2004 PDFAlex CardenasNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)