You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Ohm's Law and Electric CurrentDocument34 pagesOhm's Law and Electric CurrentSaravanan T YNo ratings yet
- Ee105 6Document28 pagesEe105 6Saravanan T YNo ratings yet
- Ee105 5Document32 pagesEe105 5Saravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Introduction to Basic Principles of Electricity and Ohm's LawDocument26 pagesIntroduction to Basic Principles of Electricity and Ohm's LawSaravanan T YNo ratings yet
- Control of Induction MotorsDocument80 pagesControl of Induction MotorsSaravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Department of Technical Education Andhra PradeshDocument36 pagesDepartment of Technical Education Andhra PradeshSaravanan T YNo ratings yet
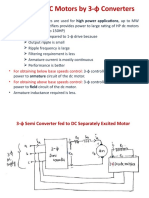
- Control of DC Motors by 3-φ ConvertersDocument16 pagesControl of DC Motors by 3-φ ConvertersSaravanan T YNo ratings yet
- Ee105 1Document32 pagesEe105 1Saravanan T YNo ratings yet
- Control of DC Motors by 1-φ ConvertersDocument6 pagesControl of DC Motors by 1-φ ConvertersSaravanan T YNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Electric Power Systems: An OverviewDocument29 pagesElectric Power Systems: An OverviewSaravanan T YNo ratings yet
- Circuit WorkSheet ChallengeDocument9 pagesCircuit WorkSheet ChallengeSaravanan T YNo ratings yet
- Speed Control of Synchronous MotorsDocument12 pagesSpeed Control of Synchronous MotorsSaravanan T YNo ratings yet
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDocument18 pagesInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YNo ratings yet
- Electrical Machine 1Document10 pagesElectrical Machine 1Irfan NaqviNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Ii. Iii I: AcademicDocument1 pageIi. Iii I: AcademicSaravanan T YNo ratings yet
- Unit-1 - DC & AC Circuits PDFDocument60 pagesUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- Narayana Engineering College Power Semiconductor Drives SubjectiveDocument7 pagesNarayana Engineering College Power Semiconductor Drives SubjectiveSaravanan T YNo ratings yet
- Synchronous Generators NotesDocument75 pagesSynchronous Generators NotesSaravanan T Y100% (1)
- Arm7 Scrib1Document72 pagesArm7 Scrib1Saravanan T YNo ratings yet
- TimersDocument51 pagesTimersSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Document9 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Saravanan T YNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Homwork - 1Document15 pagesHomwork - 1TimoNo ratings yet
- Control of MicrogridsDocument14 pagesControl of MicrogridsabhijithNo ratings yet
- Power Flex 7000Document25 pagesPower Flex 7000Felipe Rene AucailleNo ratings yet
- Panasonic Microwave Manual NNSE792-ST762Document38 pagesPanasonic Microwave Manual NNSE792-ST762Ishmael Wooloo100% (4)
- Pulse Motor Free Energy Generator For Electric Car Charging SystemDocument5 pagesPulse Motor Free Energy Generator For Electric Car Charging Systemرشيد بن صغيرNo ratings yet
- Schrack Power PCB Relay RT Inrush Power: General Purpose Rt-IpowerDocument4 pagesSchrack Power PCB Relay RT Inrush Power: General Purpose Rt-IpowerDeepak D PillaiNo ratings yet
- Rr211001 Electrical TechnologyDocument8 pagesRr211001 Electrical TechnologySrinivasa Rao GNo ratings yet
- Electrical layout and specifications for municipal buildingDocument1 pageElectrical layout and specifications for municipal buildingJopheth RelucioNo ratings yet
- vivaraZON HCP 170 171 EngDocument1 pagevivaraZON HCP 170 171 EngMocanu Romeo-CristianNo ratings yet
- PN JunctionDocument4 pagesPN JunctionJohn Raymart CostalesNo ratings yet
- Design and Assembly According To IEC 61439 / EN 61439: GuideDocument36 pagesDesign and Assembly According To IEC 61439 / EN 61439: GuideTanveer ShahriarNo ratings yet
- EE3011Document1 pageEE3011Shreeyank SinghviNo ratings yet
- 2 SK 4096Document5 pages2 SK 4096aldo_suviNo ratings yet
- 194u td001 - en PDocument12 pages194u td001 - en Pmishka123No ratings yet
- Sigma II Servo System Product Catalog Supplement 2009Document202 pagesSigma II Servo System Product Catalog Supplement 2009Trí ChốtNo ratings yet
- Pressure Relief Device Messko-Data SheetDocument6 pagesPressure Relief Device Messko-Data Sheetrasheed313No ratings yet
- Excitation SystemDocument31 pagesExcitation Systemsrza100% (1)
- CD40106BE DatasheetDocument10 pagesCD40106BE DatasheetOscar GonzalesNo ratings yet
- 12577667Document2 pages12577667Minh VienNo ratings yet
- Operating Principle of A Contactor:: Holds The Moving and Fixed Contacts Together. in The ProcessDocument15 pagesOperating Principle of A Contactor:: Holds The Moving and Fixed Contacts Together. in The ProcessAnand JainNo ratings yet
- 2011 NEC Code Changes HandbookDocument33 pages2011 NEC Code Changes HandbookBlackie KnightNo ratings yet
- Protection of Substation: 3.1. Lightning ArrestorsDocument4 pagesProtection of Substation: 3.1. Lightning ArrestorsMuhammad Asif IqbalNo ratings yet
- Lista de Precios Nexxt Infrastructure-MINIMOSDocument13 pagesLista de Precios Nexxt Infrastructure-MINIMOSMarco Antonio RubinaNo ratings yet
- CD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionDocument10 pagesCD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionWillianNo ratings yet
- MOSFET vs BJT vs FET ComparisonDocument6 pagesMOSFET vs BJT vs FET ComparisonJade JoseNo ratings yet
- FSB-200 (A) and FSB-200S (A) : Single-Ended, Reflector-Type Addressable Beam Smoke DetectorDocument4 pagesFSB-200 (A) and FSB-200S (A) : Single-Ended, Reflector-Type Addressable Beam Smoke DetectorGustavo Márquez TorresNo ratings yet
- Task 1 - Critical Review Between Conventional and Unconventional Lightning Protection SystemsDocument4 pagesTask 1 - Critical Review Between Conventional and Unconventional Lightning Protection SystemsVishal BharathNo ratings yet
- BD540, BD540A, BD540B, BD540C PNP Silicon Power TransistorsDocument6 pagesBD540, BD540A, BD540B, BD540C PNP Silicon Power TransistorsClaudinei BarbosaNo ratings yet
- STR5A464x Series Data Sheet: For Non-Isolated Off-Line PWM Controllers With Integrated Power MOSFETDocument23 pagesSTR5A464x Series Data Sheet: For Non-Isolated Off-Line PWM Controllers With Integrated Power MOSFETHeru susantoNo ratings yet
- Design of DC Machines and TransformerDocument3 pagesDesign of DC Machines and Transformermanish_iitrNo ratings yet