You might also like
- 7 - Embedded Application DevelopmentDocument52 pages7 - Embedded Application DevelopmentmmkayaNo ratings yet
- 9 - Pulse Width ModulationDocument56 pages9 - Pulse Width ModulationmmkayaNo ratings yet
- 8 - Fixed Point Arithmetic and FiltersDocument12 pages8 - Fixed Point Arithmetic and FiltersmmkayaNo ratings yet
- 10 - EncodersDocument11 pages10 - EncodersmmkayaNo ratings yet
- 12 - Inter-Integrated Circuit CommunicationDocument18 pages12 - Inter-Integrated Circuit CommunicationmmkayaNo ratings yet
- Jlin-Bdz4n6 R0 en SRC PDFDocument93 pagesJlin-Bdz4n6 R0 en SRC PDFmmkayaNo ratings yet
- Control Systems of Single-Phase Voltage Source Inverters For A UPSDocument6 pagesControl Systems of Single-Phase Voltage Source Inverters For A UPSmmkayaNo ratings yet
- Chapter 9Document25 pagesChapter 9mmkayaNo ratings yet
- Electronics IGBT Drivers Principles and Applications Rev03 EXPDocument79 pagesElectronics IGBT Drivers Principles and Applications Rev03 EXPmmkayaNo ratings yet
- Automated Degaussing of Optical Gyro: Baburao Kodavati, T.Apparao, J.M.Rao Malla, E.Ram Babu, R.VenkateswarluDocument9 pagesAutomated Degaussing of Optical Gyro: Baburao Kodavati, T.Apparao, J.M.Rao Malla, E.Ram Babu, R.VenkateswarlummkayaNo ratings yet
- Item Revision Naming SchemesDocument3 pagesItem Revision Naming SchemesmmkayaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ENSTO клеммыDocument92 pagesENSTO клеммыenstospbNo ratings yet
- Service Manual: LCI-100/200 Illumination and Imaging SystemDocument69 pagesService Manual: LCI-100/200 Illumination and Imaging SystemfugarisaNo ratings yet
- Special Project ReportDocument9 pagesSpecial Project ReportSangam PatariNo ratings yet
- Electronic Prepayment Meter6Document4 pagesElectronic Prepayment Meter6Sumitha SudevanNo ratings yet
- Courses To Study 13 X 2010Document96 pagesCourses To Study 13 X 2010hitmaaaccountNo ratings yet
- Synthesis Paper On Nuclear PPDocument3 pagesSynthesis Paper On Nuclear PPchristinekehyengNo ratings yet
- Design ParameterDocument13 pagesDesign ParameterkennysawegNo ratings yet
- Air Bag BleizerDocument88 pagesAir Bag BleizerEnrique Felipe Reveco BahamondesNo ratings yet
- Flexi Multiradio 10 Base Station Transmission DescriptionDocument27 pagesFlexi Multiradio 10 Base Station Transmission DescriptionMohamedNasser Gad El MawlaNo ratings yet
- C O P D: Hronic Bstructive Ulmonary IseaseDocument53 pagesC O P D: Hronic Bstructive Ulmonary IseaseLe KhoaNo ratings yet
- In-Situ AbstDocument5 pagesIn-Situ AbstFahim MunawarNo ratings yet
- Womens Basketball Spring Strength Training-2Document1 pageWomens Basketball Spring Strength Training-2api-548848665No ratings yet
- Krohne mfc300 Manual PDFDocument180 pagesKrohne mfc300 Manual PDFJorge GilNo ratings yet
- LSPU Self-Paced Learning Module (SLM) : CalculusDocument88 pagesLSPU Self-Paced Learning Module (SLM) : CalculusDharwyn Avy Advento CalmaNo ratings yet
- 7 140706224638 Phpapp01Document165 pages7 140706224638 Phpapp01Theodøros D' Spectrøøm0% (1)
- Epson C82 Service ManualDocument48 pagesEpson C82 Service ManualPablo RothNo ratings yet
- Prevalence of Diabetes Mellitus Amongst Antenatal Clinic Attendees at Booking in A Teaching Hospital in Rivers State, NigeriaDocument3 pagesPrevalence of Diabetes Mellitus Amongst Antenatal Clinic Attendees at Booking in A Teaching Hospital in Rivers State, NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Critec Transient Discriminating MOVTEC: FeaturesDocument2 pagesCritec Transient Discriminating MOVTEC: Featuresphu pham quocNo ratings yet
- 2 Stress-Strain-Axial (2022)Document66 pages2 Stress-Strain-Axial (2022)YAŞAR MERT DOĞANAYNo ratings yet
- Manual of Microbiological Culture Media - 9Document1 pageManual of Microbiological Culture Media - 9Amin TaleghaniNo ratings yet
- Wind PumpDocument6 pagesWind PumpCarlos Castillo PalmaNo ratings yet
- Types of ProductionDocument2 pagesTypes of ProductionromwamaNo ratings yet
- ENGR 260 - Circuits and Devices: COURSE SYLLABUS - Spring 2015Document4 pagesENGR 260 - Circuits and Devices: COURSE SYLLABUS - Spring 2015saintNo ratings yet
- HW 7Document3 pagesHW 7Khuram MaqsoodNo ratings yet
- Stories of Love and AdventureDocument24 pagesStories of Love and AdventureMargie HernandezNo ratings yet
- CC Assignments CurrentDocument53 pagesCC Assignments Currentranjeet100% (3)
- WWW - Racingmauritius.Mu: Jockey WGT Equip. R Start Index Finish Index Potential Ratings 5 Last Perf # HorseDocument2 pagesWWW - Racingmauritius.Mu: Jockey WGT Equip. R Start Index Finish Index Potential Ratings 5 Last Perf # HorseThe Kovalan 2018No ratings yet
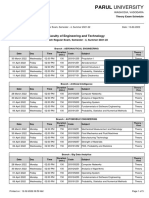
- Parul University: Faculty of Engineering and TechnologyDocument5 pagesParul University: Faculty of Engineering and TechnologySudhanshu SinghNo ratings yet
- The Beauty of HolinessDocument5 pagesThe Beauty of HolinessGrace Church Modesto100% (1)