You might also like
- Mit PDFDocument62 pagesMit PDFFernando RosalesNo ratings yet
- Ce 297 HW PDFDocument6 pagesCe 297 HW PDFLuis Ariel MorilloNo ratings yet
- Generation Requirements Shape FunctDocument34 pagesGeneration Requirements Shape FunctyohplalaNo ratings yet
- Hydroelectric and Dam Engineering Library of General ResourcesDocument14 pagesHydroelectric and Dam Engineering Library of General ResourcesLuis Ariel MorilloNo ratings yet
- Beams 3SRB JPILAR BUL 20200311Document24 pagesBeams 3SRB JPILAR BUL 20200311Luis Ariel MorilloNo ratings yet
- Ce 297 HW PDFDocument6 pagesCe 297 HW PDFLuis Ariel MorilloNo ratings yet
- Ce 297 HW PDFDocument6 pagesCe 297 HW PDFLuis Ariel MorilloNo ratings yet
- Additional Footing ChecksDocument2 pagesAdditional Footing ChecksLuis Ariel MorilloNo ratings yet
- NCHRP RPT 611appendixDocument163 pagesNCHRP RPT 611appendixguillermoNo ratings yet
- AASHTO BEAMS Standard DimentionsDocument16 pagesAASHTO BEAMS Standard Dimentionsjedidestroyer100% (1)
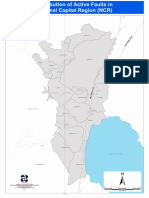
- Distribution of Active Faults in National Capital Region - 2015Document1 pageDistribution of Active Faults in National Capital Region - 2015Luis Ariel MorilloNo ratings yet
- Red Hot Chili Lyrics - V2Document2 pagesRed Hot Chili Lyrics - V2Luis Ariel MorilloNo ratings yet
- Additional Footing ChecksDocument2 pagesAdditional Footing ChecksLuis Ariel MorilloNo ratings yet
- Concrete Beam DesignDocument12 pagesConcrete Beam DesignLuis Ariel MorilloNo ratings yet
- Udayanandan, Notes On Tensors PDFDocument56 pagesUdayanandan, Notes On Tensors PDFhristos314No ratings yet
- ASTM D4630-96 Standard Test Method For Determining Transmissivity and Storage Coefficient of Low Permeability Rocks by in Situ Measurements Using The Constant Head Injection Test (WITHDRAWN)Document6 pagesASTM D4630-96 Standard Test Method For Determining Transmissivity and Storage Coefficient of Low Permeability Rocks by in Situ Measurements Using The Constant Head Injection Test (WITHDRAWN)Luis Ariel Morillo100% (1)
- ASTM E494-15 Standard Practice For Measuring Ultrasonice Velocity in MaterialsDocument14 pagesASTM E494-15 Standard Practice For Measuring Ultrasonice Velocity in MaterialsLuis Ariel Morillo100% (1)
- SP ColumnDocument2 pagesSP ColumnMazharYasinNo ratings yet
- Solutions Manual Continuum Mechanics Lai 4th EdittionDocument246 pagesSolutions Manual Continuum Mechanics Lai 4th Edittiondiego_dave89% (18)
- D7400 29032-1 PDFDocument11 pagesD7400 29032-1 PDFRaul Armando Acho QuispeNo ratings yet
- 6100Document9 pages6100Luis Ariel MorilloNo ratings yet
- Proposed Updates To The ASCE 41 Nonlinear Modeling Parameters For Wide-Flange Steel Columns in Support of Performance-Based Seismic EngineeringDocument13 pagesProposed Updates To The ASCE 41 Nonlinear Modeling Parameters For Wide-Flange Steel Columns in Support of Performance-Based Seismic EngineeringLuis Ariel MorilloNo ratings yet
- Proposed Updates To The ASCE 41 Nonlinear Modeling Parameters For Wide-Flange Steel Columns in Support of Performance-Based Seismic EngineeringDocument13 pagesProposed Updates To The ASCE 41 Nonlinear Modeling Parameters For Wide-Flange Steel Columns in Support of Performance-Based Seismic EngineeringLuis Ariel MorilloNo ratings yet
- Bridge Inspection Form General Information: Dimension (M)Document1 pageBridge Inspection Form General Information: Dimension (M)Luis Ariel MorilloNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Math 120 FinalDocument13 pagesMath 120 FinalAtif ZaheerNo ratings yet
- MC SimulatorDocument12 pagesMC Simulatorrogue8No ratings yet
- (Finance and Accounts)Document79 pages(Finance and Accounts)jorzfandnessNo ratings yet
- Deep Kernel Learning: Mackay 1998Document19 pagesDeep Kernel Learning: Mackay 1998Jane DaneNo ratings yet
- CasioDocument1 pageCasioGary SynthosNo ratings yet
- Linear Analysis of StructureDocument105 pagesLinear Analysis of StructureYasir SiddiqNo ratings yet
- Advanced SRV ManualDocument46 pagesAdvanced SRV ManualEric Duane Scott0% (1)
- The Analytic Hierarchy Process: 1 How The AHP WorksDocument6 pagesThe Analytic Hierarchy Process: 1 How The AHP WorksHelza O. BarlinaNo ratings yet
- Multicriteria Decision: AHP MethodDocument4 pagesMulticriteria Decision: AHP MethodLouis LaiNo ratings yet
- Homogeneous TransformDocument12 pagesHomogeneous TransformharshNo ratings yet
- Python For Science and EngineeringDocument304 pagesPython For Science and Engineeringzimo80100% (5)
- Excel Ahp ProcessDocument2 pagesExcel Ahp Processdc080888100% (1)
- Project ReportDocument62 pagesProject ReportPulkit ChauhanNo ratings yet
- Lab Session 08: Relational and Logical OperatorsDocument5 pagesLab Session 08: Relational and Logical OperatorsShahansha HumayunNo ratings yet
- 2018 03 08 10 45 38Document31 pages2018 03 08 10 45 38Abin Satheesh Manu100% (1)
- Length Is 2 or More and The First and Last Character Are Same From A Given List of StringsDocument6 pagesLength Is 2 or More and The First and Last Character Are Same From A Given List of StringsAnuj RuhelaNo ratings yet
- Problems Using ScilabDocument28 pagesProblems Using Scilabdeepika snehiNo ratings yet
- Mathematics (51) : Class XDocument5 pagesMathematics (51) : Class XdhruvNo ratings yet
- Us Syllabus For Electric EngineeringDocument13 pagesUs Syllabus For Electric EngineeringThiaga RajanNo ratings yet
- Linear Algebra NotesDocument17 pagesLinear Algebra Notesv3869dj0gNo ratings yet
- 1521090661Document114 pages1521090661Sachin ChakradharNo ratings yet
- Introduction To Matlab Application To Electrical Engineering Part IDocument99 pagesIntroduction To Matlab Application To Electrical Engineering Part ITrương ĐứcNo ratings yet
- MMPO 001 23-24 @assignment - Solved - IGNOUDocument21 pagesMMPO 001 23-24 @assignment - Solved - IGNOUprincemehra1313No ratings yet
- Matrix Data Analysis ChartDocument6 pagesMatrix Data Analysis ChartMeng Arnold100% (1)
- Additional MathematicsDocument8 pagesAdditional MathematicsStanleyNo ratings yet
- Projection MatricesDocument31 pagesProjection MatricesJasper LuNo ratings yet
- Computational Geomechanics Course Notes: Brice Lecampion Geo-Energy Lab - EPFL September 17, 2021Document137 pagesComputational Geomechanics Course Notes: Brice Lecampion Geo-Energy Lab - EPFL September 17, 2021youceftliNo ratings yet
- P21-M SC - PHYSICSDocument120 pagesP21-M SC - PHYSICSRADHAKRISHNANNo ratings yet
- COMSATS Institute of Information Technology Abbottabad: Course Plan - Semester SP-17Document3 pagesCOMSATS Institute of Information Technology Abbottabad: Course Plan - Semester SP-17Ahsan AliNo ratings yet
- (Universitext) Elmer G. Rees (Auth.) - Notes On Geometry-Springer-Verlag Berlin Heidelberg (1983)Document118 pages(Universitext) Elmer G. Rees (Auth.) - Notes On Geometry-Springer-Verlag Berlin Heidelberg (1983)library gcpeshawar0% (3)