You might also like
- HKIMO Heat Round 2019 Primary 4 PDFDocument7 pagesHKIMO Heat Round 2019 Primary 4 PDFDoan Viet Hung100% (2)
- Pert Mathematics Formula SheetDocument16 pagesPert Mathematics Formula SheetNathan HurwitzNo ratings yet
- 小學一年級 Primary 1: 120 120 試題 Question PaperDocument9 pages小學一年級 Primary 1: 120 120 試題 Question PaperMartin Lewis Koa100% (2)
- AJC H2 Math 2013 Prelim P1 SolutionsDocument15 pagesAJC H2 Math 2013 Prelim P1 Solutionsnej200695No ratings yet
- Reteach RatiosDocument1 pageReteach Ratiosapi-323814079No ratings yet
- 4552 Cubic QuarticDocument6 pages4552 Cubic Quarticสนธยา เสนามนตรีNo ratings yet
- A Cyclotomic Contruction For Leech's LatticesDocument6 pagesA Cyclotomic Contruction For Leech's LatticesVictor MaximianoNo ratings yet
- Cardano's Method: Appendix 1Document10 pagesCardano's Method: Appendix 1Andrew ArahaNo ratings yet
- 2 Complex Numbers: 2.1 Historical Note)Document13 pages2 Complex Numbers: 2.1 Historical Note)shuaiyuan chenNo ratings yet
- The Hypergeometric Differential Equation With Cubic Curves As Schwarz ImagesDocument20 pagesThe Hypergeometric Differential Equation With Cubic Curves As Schwarz Images3873263No ratings yet
- IAS Mains Mathematics 2007Document6 pagesIAS Mains Mathematics 2007abhi_iitd20094668No ratings yet
- Pmath940-W2 Copy 7Document11 pagesPmath940-W2 Copy 7Annie LiNo ratings yet
- MSCBSE0002Document27 pagesMSCBSE0002milapdhruvcomputerworkNo ratings yet
- Baltic Way 2016 - SolutionsDocument10 pagesBaltic Way 2016 - SolutionsgeorgeNo ratings yet
- CBSE X 2009 Mathematics: Section BDocument4 pagesCBSE X 2009 Mathematics: Section Bapi-19808758No ratings yet
- Topics: Turbulence Prof. E.G. Tulapurkara Chapter-3Document10 pagesTopics: Turbulence Prof. E.G. Tulapurkara Chapter-3Noins1946No ratings yet
- Outline of Solutions To Homework 1Document3 pagesOutline of Solutions To Homework 1Michel AndradeNo ratings yet
- A Computational Introduction To Number Theory and Algebra - Victor ShoupsDocument60 pagesA Computational Introduction To Number Theory and Algebra - Victor ShoupshenrypattyNo ratings yet
- Straight Lines: DPP 08 (Of Lec 11) - Arjuna JEE 2024Document3 pagesStraight Lines: DPP 08 (Of Lec 11) - Arjuna JEE 2024jobjob2631No ratings yet
- 2013 Preliminary Examinations Question Compilation Complex NumbersDocument5 pages2013 Preliminary Examinations Question Compilation Complex NumbersChow Kim WanNo ratings yet
- Winter20MAT141 PSet1SolutionsDocument17 pagesWinter20MAT141 PSet1SolutionsJoy ReynonNo ratings yet
- Internet Supplement For Basic Complex Analysis: Third EditionDocument69 pagesInternet Supplement For Basic Complex Analysis: Third Editionclaudia albañilNo ratings yet
- K01603 - 20190413172609 - Lecture Note - Chapter 3 PDFDocument32 pagesK01603 - 20190413172609 - Lecture Note - Chapter 3 PDFSHARIFAH NUR ARISHIA WAN HAZAMINo ratings yet
- In Class, I Wrote This As X 3px + 2q To Simplify The Resulting FormulaDocument2 pagesIn Class, I Wrote This As X 3px + 2q To Simplify The Resulting FormulaElla Canonigo CanteroNo ratings yet
- On The Equation X: Florian LucaDocument6 pagesOn The Equation X: Florian LucaMircea_Guna_3852No ratings yet
- Math 1131 AssignmentDocument8 pagesMath 1131 Assignmenttalha3.choudharyNo ratings yet
- Macdougall Jim HeronapgpDocument7 pagesMacdougall Jim HeronapgpPerepePereNo ratings yet
- Ideal Theory: ! W W L Chen, 1984, 2013Document13 pagesIdeal Theory: ! W W L Chen, 1984, 2013Ehab AhmedNo ratings yet
- On The Inradius of A Tangential QuadrilateralDocument8 pagesOn The Inradius of A Tangential Quadrilateralcloz54No ratings yet
- Lec 12 WeekDocument6 pagesLec 12 WeekDaniel José KmitaNo ratings yet
- Pair of Straight LinesDocument5 pagesPair of Straight LinesAnant KumarNo ratings yet
- Mathematics Paper With Answer EveningDocument5 pagesMathematics Paper With Answer EveningDeepakNo ratings yet
- (Maximum Marks: 100) (Time Allowed: Three Hours) (Candidates Are Allowed Additional 15 Minutes For Only Reading The PaperDocument25 pages(Maximum Marks: 100) (Time Allowed: Three Hours) (Candidates Are Allowed Additional 15 Minutes For Only Reading The PaperchovvNo ratings yet
- JEE MainDocument12 pagesJEE MainsheenusdrNo ratings yet
- HW3Document10 pagesHW3nauthylusNo ratings yet
- Radial Viscous Flow Between Two Parallel Annular PlatesDocument12 pagesRadial Viscous Flow Between Two Parallel Annular PlatesKyi Htin PawNo ratings yet
- Chapter 3Document32 pagesChapter 3LEE LEE LAUNo ratings yet
- WeihoDocument2 pagesWeihomqtrinhNo ratings yet
- PM Fall2018SolutionsDocument9 pagesPM Fall2018SolutionsHamza ShafiqNo ratings yet
- PT-1 Paper and Its KeyDocument13 pagesPT-1 Paper and Its KeyTamanna Gupta VIIB 6No ratings yet
- Solutions CH 03Document10 pagesSolutions CH 03JoonKwonNo ratings yet
- Linear AlgebraDocument6 pagesLinear AlgebraPeterNo ratings yet
- Pre-RMO Major # SolutionDocument15 pagesPre-RMO Major # SolutionSapna AgrawalNo ratings yet
- Lecture3 PDFDocument19 pagesLecture3 PDFM Salman RyanNo ratings yet
- M InvestDocument21 pagesM InvestNinja MentroNo ratings yet
- Tarea Curvas El PticasDocument3 pagesTarea Curvas El PticasCamilo EscobarNo ratings yet
- Polynomial Transformations of Tschirnhaus, Bring and Jerrard4s++Document5 pagesPolynomial Transformations of Tschirnhaus, Bring and Jerrard4s++wlsvieiraNo ratings yet
- Special FunDocument10 pagesSpecial FunJHNo ratings yet
- On Finding Integer Solutions To Non-Homogeneous Ternary Bi-QuadraticDocument10 pagesOn Finding Integer Solutions To Non-Homogeneous Ternary Bi-QuadraticDr. J. kannanNo ratings yet
- Answering Counting Aggregate Queries Over Ontologies of DL-Lite Family (Proofs)Document7 pagesAnswering Counting Aggregate Queries Over Ontologies of DL-Lite Family (Proofs)anonymousaaai2013No ratings yet
- Iit, Review Final Examination, Math 333Document4 pagesIit, Review Final Examination, Math 333Quỳnh Trang TrầnNo ratings yet
- MathsDocument6 pagesMathsAnujGoyalNo ratings yet
- Test 3 MAT 1341C March 31, 2012 1Document5 pagesTest 3 MAT 1341C March 31, 2012 1examkillerNo ratings yet
- On Quaternary Quadratic Diophantine Equations PDFDocument5 pagesOn Quaternary Quadratic Diophantine Equations PDFhumejiasNo ratings yet
- 12 International Mathematics Competition For University StudentsDocument4 pages12 International Mathematics Competition For University StudentsMuhammad Al KahfiNo ratings yet
- 102HW5 09 SolDocument6 pages102HW5 09 SolShawn SagarNo ratings yet
- RHO Periodic PDFDocument4 pagesRHO Periodic PDFPrabhat NarangNo ratings yet
- Straight Line - DPP 02 (Of Lec 03) - (Prayas 2.0 2023 PW Star)Document3 pagesStraight Line - DPP 02 (Of Lec 03) - (Prayas 2.0 2023 PW Star)Deep SarkarNo ratings yet
- UntitledDocument6 pagesUntitledTeun SilviusNo ratings yet
- Solutions To Problems: Section 1.1Document11 pagesSolutions To Problems: Section 1.1Ahmed SamirNo ratings yet
- GATE Mathematics Paper-2007Document11 pagesGATE Mathematics Paper-2007RajkumarNo ratings yet
- Maths PDFDocument43 pagesMaths PDFDatta WakdeNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Department of Education: NAME - SCOREDocument5 pagesDepartment of Education: NAME - SCOREMarites James - LomibaoNo ratings yet
- Three Dimensional GeometryDocument12 pagesThree Dimensional GeometryPedro Flavio Silva OthecharNo ratings yet
- KAS 103 - Unit 3 - Lect - 5Document17 pagesKAS 103 - Unit 3 - Lect - 5sagar guptaNo ratings yet
- Buku Praktikum Pa 2015Document4 pagesBuku Praktikum Pa 2015Muhammad YushaNo ratings yet
- Polynomials Name: Ravishu Nagarwal Class: X Section: C Roll No.: 28 ADMISSION NO.: 14864Document13 pagesPolynomials Name: Ravishu Nagarwal Class: X Section: C Roll No.: 28 ADMISSION NO.: 14864Ravishu NagarwalNo ratings yet
- Factoring Polynomials PDFDocument2 pagesFactoring Polynomials PDFSofiaNo ratings yet
- Geometry Volall PDFDocument2 pagesGeometry Volall PDFMark Christian Dimson Galang100% (1)
- Pe 2 TrigonometryDocument10 pagesPe 2 TrigonometryJosuelle MadulaNo ratings yet
- Number Talk TimelineDocument5 pagesNumber Talk Timelineapi-260683323No ratings yet
- Congruence, Similarity and Enlargement Year 10: 2 MarksDocument4 pagesCongruence, Similarity and Enlargement Year 10: 2 Marksaqsa shahzadNo ratings yet
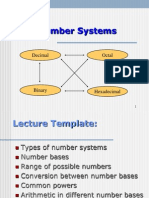
- Number Systems: Decimal OctalDocument89 pagesNumber Systems: Decimal Octalyagnasree_sNo ratings yet
- 11 - Trigonometric IdentitiesDocument6 pages11 - Trigonometric IdentitiesQwert RNo ratings yet
- Term 1 Maths 12THDocument4 pagesTerm 1 Maths 12THTrupti JadhaoNo ratings yet
- Chapter 3 DraftDocument6 pagesChapter 3 DraftPaopao MacalaladNo ratings yet
- 30 C 1 Mathematics StandardDocument23 pages30 C 1 Mathematics Standard131079kunjanNo ratings yet
- CHAPTER 3 Pythagoras and Trigonometry REVISIONDocument4 pagesCHAPTER 3 Pythagoras and Trigonometry REVISIONAbbygailNo ratings yet
- Pellissippi State Middle School Mathematics CompetitionDocument9 pagesPellissippi State Middle School Mathematics Competitionog levyNo ratings yet
- 55 ProblemsDocument56 pages55 ProblemsRizBrozNo ratings yet
- Triangle CongruenceDocument7 pagesTriangle CongruenceJay UsNo ratings yet
- Maths FullDocument1,487 pagesMaths FullShyamNo ratings yet
- Domain and Range of Inverse FunctionsDocument5 pagesDomain and Range of Inverse FunctionsLALITH NARAYANA RAO VELAGANo ratings yet
- Interactive QuizDocument63 pagesInteractive QuizKyla Canlas0% (1)
- Graphing Rational FunctionDocument33 pagesGraphing Rational FunctionLavigne EmphasisNo ratings yet
- MODULEMATH9999999final 17 PDFDocument138 pagesMODULEMATH9999999final 17 PDFRoby PadillaNo ratings yet
- Lecture 6Document91 pagesLecture 6SatyaNo ratings yet