You might also like
- Lec1 Intro PDFDocument41 pagesLec1 Intro PDFSandip BarikNo ratings yet
- Chapter 1 MechanismDocument82 pagesChapter 1 MechanismMohsan AbbasNo ratings yet
- Theory of Machines - I: Sunil BhilDocument9 pagesTheory of Machines - I: Sunil BhilDrew LadlowNo ratings yet
- MEC 203 Mechanics of Machines Course OverviewDocument48 pagesMEC 203 Mechanics of Machines Course OverviewYuvraj Singh100% (1)
- Degree of FreedomDocument8 pagesDegree of Freedommuddassir razzaqNo ratings yet
- TOM-Introduction to Theory of MachinesDocument8 pagesTOM-Introduction to Theory of MachinesOk SokNo ratings yet
- Lecture - 1 ME3401 ADocument20 pagesLecture - 1 ME3401 AMd. Osman AliNo ratings yet
- ME 3401 Mechanics of Machinery Lecture 1Document20 pagesME 3401 Mechanics of Machinery Lecture 1IH RubelNo ratings yet
- Kinematics of Mechanisms (ME-505) : Text BookDocument41 pagesKinematics of Mechanisms (ME-505) : Text BookAnkit AmbaniNo ratings yet
- MEC403 Theory of Machines Course OverviewDocument1 pageMEC403 Theory of Machines Course OverviewHoney SinghNo ratings yet
- Developmentanddynamicmodellingofaflexure Based PDFDocument22 pagesDevelopmentanddynamicmodellingofaflexure Based PDFDenise NelsonNo ratings yet
- Course OutlineDocument3 pagesCourse OutlineHaile SimachewNo ratings yet
- 081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFDocument99 pages081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFKrish NarayananNo ratings yet
- PUP Mechanical Engineering Quiz on Machine ElementsDocument16 pagesPUP Mechanical Engineering Quiz on Machine ElementsQuen CuestaNo ratings yet
- KMDocument120 pagesKMsady1967No ratings yet
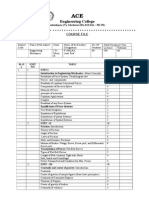
- Engineering College: Course FileDocument2 pagesEngineering College: Course Filevenkateshyadav2116No ratings yet
- ME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Document14 pagesME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Diala DurubiNo ratings yet
- 01 CHAPTER 1 IntroductionDocument17 pages01 CHAPTER 1 IntroductionJerome XaviorNo ratings yet
- Kinematic BasicDocument138 pagesKinematic BasicAkhil GeorgeNo ratings yet
- KOM SlidesDocument262 pagesKOM Slidesgurumahesh gNo ratings yet
- KMDocument120 pagesKMsankara25101991No ratings yet
- ME 301 Theory of Machines I ExamplesDocument12 pagesME 301 Theory of Machines I ExamplesDasai KamiNo ratings yet
- ME6505 Notes RejinpaulDocument51 pagesME6505 Notes Rejinpaulvikram kumarNo ratings yet
- Mechanism and Machine Theory: К. Bissembayev, Zh. IskakovDocument18 pagesMechanism and Machine Theory: К. Bissembayev, Zh. IskakovDennis AlexanderNo ratings yet
- Intoduction EMEDocument25 pagesIntoduction EMEgajendra yadavNo ratings yet
- Kinematics of Mechanisms: Motion Study and AnalysisDocument82 pagesKinematics of Mechanisms: Motion Study and AnalysisDharmesh PatelNo ratings yet
- Pro/E Mechanism: Introduction ClassDocument8 pagesPro/E Mechanism: Introduction ClassShasank PramodeNo ratings yet
- Machine Mechanics GuideDocument64 pagesMachine Mechanics GuideronaldoNo ratings yet
- Kinematics of Machinery Unit 1Document100 pagesKinematics of Machinery Unit 1Harinath GowdNo ratings yet
- MEC 403 Part 1 Fundamental of Kinematics & MechanismDocument24 pagesMEC 403 Part 1 Fundamental of Kinematics & MechanismFashipe OladapoNo ratings yet
- Syllabus (New2013 Pattern) - TOM-IDocument14 pagesSyllabus (New2013 Pattern) - TOM-IAkshayNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Course Objectives:: Me3262:Dynamics of MachinesDocument4 pagesCourse Objectives:: Me3262:Dynamics of Machinesgiriaj kokareNo ratings yet
- ELEM313 IntroductionDocument17 pagesELEM313 IntroductionJireh Raphael MoralesNo ratings yet
- Mechanism KinematicsDocument4 pagesMechanism KinematicsLuis OscarNo ratings yet
- 2 2mechanicalsystemsDocument4 pages2 2mechanicalsystemsapi-358875983No ratings yet
- Me6401 KomDocument128 pagesMe6401 KomThomas LafontaineNo ratings yet
- VCS REPORT FinalDocument7 pagesVCS REPORT Finalasd108533No ratings yet
- Mechanical Systems and Signal Processing: Robert Konowrocki, Tomasz Szolc, Andrzej Pochanke, Agnieszka PR ĘgowskaDocument17 pagesMechanical Systems and Signal Processing: Robert Konowrocki, Tomasz Szolc, Andrzej Pochanke, Agnieszka PR ĘgowskaAnita IonelaNo ratings yet
- Kinematics of MachineryDocument49 pagesKinematics of Machinerys953249No ratings yet
- Compliant Folded Beam Suspension MechanismDocument18 pagesCompliant Folded Beam Suspension Mechanismomer elaminNo ratings yet
- Research ArticleDocument20 pagesResearch Articlesuresh_501No ratings yet
- Mechanisms of Machinery Blue Print ObjectivesDocument9 pagesMechanisms of Machinery Blue Print Objectiveskidusabeje7No ratings yet
- AC Servo Motor-1Document6 pagesAC Servo Motor-1Tawhid Bin TarekNo ratings yet
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocument9 pagesPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentNo ratings yet
- Machine (Mechanical) - Wikipedia, The Free EncyclopediaDocument10 pagesMachine (Mechanical) - Wikipedia, The Free EncyclopediabmxengineeringNo ratings yet
- 03 Te Tom-IiDocument3 pages03 Te Tom-Iikiran_wakchaureNo ratings yet
- Advanced Flight Dynamics - Lec10Document34 pagesAdvanced Flight Dynamics - Lec10Davood AsadihendoustaniNo ratings yet
- KOM Final 13 May 2020Document5 pagesKOM Final 13 May 2020Nilesh GhugeNo ratings yet
- MECH3030 Mechanisms of Machinery Course SyllabusDocument59 pagesMECH3030 Mechanisms of Machinery Course SyllabusBillyNo ratings yet
- Mathematical Models of Systems and Control EngineeringDocument18 pagesMathematical Models of Systems and Control EngineeringAgung Dedi PratamaNo ratings yet
- Lab 01 by 0004Document7 pagesLab 01 by 0004Zohaib Arif MehmoodNo ratings yet
- Machine Tool Engineering DesignDocument34 pagesMachine Tool Engineering DesignAshok Kumar UppariNo ratings yet
- Kom Lecture NotesDocument163 pagesKom Lecture NotesgvnagamaniNo ratings yet
- Kinematic BasicDocument138 pagesKinematic BasicIshank Singh SandhuNo ratings yet
- 12101dep-notice_04242021Document104 pages12101dep-notice_04242021ahmed titoNo ratings yet
- ME 3507: Theory of Machines: Dr. Faraz JunejoDocument45 pagesME 3507: Theory of Machines: Dr. Faraz JunejoArsal AbbasNo ratings yet
- Transfer Matrix Method for Multibody Systems: Theory and ApplicationsFrom EverandTransfer Matrix Method for Multibody Systems: Theory and ApplicationsNo ratings yet
- TS4F01-1 Unit 4 - Document ControlDocument66 pagesTS4F01-1 Unit 4 - Document ControlLuki1233332No ratings yet
- Airfoil DesignDocument18 pagesAirfoil Designapi-269373691No ratings yet
- Customer Satisfaction Romania URTPDocument16 pagesCustomer Satisfaction Romania URTPGajanan PatilNo ratings yet
- Katalog Ag-700 To Ag-800Document1 pageKatalog Ag-700 To Ag-800Iqbal AbugindaNo ratings yet
- Quality Assurance AnalystDocument2 pagesQuality Assurance AnalystMalikNo ratings yet
- SD Card Formatter 5.01 User's Manual: July 15, 2021Document11 pagesSD Card Formatter 5.01 User's Manual: July 15, 2021Alexis GutierrezNo ratings yet
- Part IIDocument281 pagesPart IILeng SovannarithNo ratings yet
- Handbook Valve Technology 03.04.2020Document132 pagesHandbook Valve Technology 03.04.2020Ramazan YaşarNo ratings yet
- Yearly Lesson Plan LK Form 5Document26 pagesYearly Lesson Plan LK Form 5Nur'ain Abd RahimNo ratings yet
- Cars and Trucks With Mitsubishi TD04 TurbochargerDocument17 pagesCars and Trucks With Mitsubishi TD04 TurbochargersampapaNo ratings yet
- A Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorDocument13 pagesA Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorJack WenNo ratings yet
- hts336555 Philips Manual PDFDocument35 pageshts336555 Philips Manual PDFSalomão SouzaNo ratings yet
- Walsh, S. (2006)Document10 pagesWalsh, S. (2006)ratu erlindaNo ratings yet
- TUDelft Clay Suction PDFDocument8 pagesTUDelft Clay Suction PDFDing LiuNo ratings yet
- Practical Research 2: Quarter 1 - Module 1Document35 pagesPractical Research 2: Quarter 1 - Module 1Alvin Sinel Belejerdo90% (10)
- Harmonic Excitation and Response Spectrum AnalysisDocument54 pagesHarmonic Excitation and Response Spectrum AnalysisAayisha S AHAMED100% (1)
- Business Communication - Module 3 - Org. 2015Document41 pagesBusiness Communication - Module 3 - Org. 2015Smriti MehtaNo ratings yet
- 2.3 Motion and SafetyDocument13 pages2.3 Motion and SafetyGeorge TongNo ratings yet
- Unleashing Learner PowerDocument188 pagesUnleashing Learner PowerEka MeilinaNo ratings yet
- Ilang - Ilang LP g7Document6 pagesIlang - Ilang LP g7custodiokeizelNo ratings yet
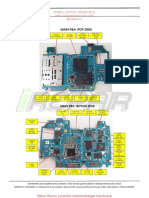
- SM-A102N Manual de Servicio Anibal Garcia IrepaiDocument37 pagesSM-A102N Manual de Servicio Anibal Garcia IrepaiJoaquin Koki Ventura100% (1)
- B.Tech (ECE) Course Scheme & Syllabus as per CBCSDocument168 pagesB.Tech (ECE) Course Scheme & Syllabus as per CBCSRatsihNo ratings yet
- HXPM8XBBYY19065T2CDocument1 pageHXPM8XBBYY19065T2CЕвгений ГрязевNo ratings yet
- Organization Management and LeadershipDocument26 pagesOrganization Management and LeadershipOtilia BadeaNo ratings yet
- Chapter 4 1 Indefinite IntegralDocument21 pagesChapter 4 1 Indefinite IntegralMinh Huỳnh LêNo ratings yet
- MyITLab Access Grader Real Estate Case SolutionDocument3 pagesMyITLab Access Grader Real Estate Case SolutionShivaani Aggarwal0% (1)
- COMPUTER NETWORKS-3, Nitheesh.T, 21MIS0401Document23 pagesCOMPUTER NETWORKS-3, Nitheesh.T, 21MIS0401nitheeshNo ratings yet
- Distance ProtectionDocument21 pagesDistance Protectiondesilvatharindu1No ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- ReLu Heuristics For Avoiding Local Bad MinimaDocument10 pagesReLu Heuristics For Avoiding Local Bad MinimaShanmuganathan V (RC2113003011029)100% (1)