You might also like
- BASICS OF MECHANISMSDocument9 pagesBASICS OF MECHANISMSNagendrababu VasaNo ratings yet
- LAB 09 Oscillating Cylinder MechanismDocument11 pagesLAB 09 Oscillating Cylinder Mechanismmehtab ul hassanNo ratings yet
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocument43 pagesPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNo ratings yet
- Machines and Mechanisms GuideDocument38 pagesMachines and Mechanisms GuideMudit MaheshwariNo ratings yet
- Lecture 3 merchDocument66 pagesLecture 3 merchMuhammad Amir TajNo ratings yet
- MECHANICS OF VEHICLES: Simple Mechanisms to Vehicle ControlDocument18 pagesMECHANICS OF VEHICLES: Simple Mechanisms to Vehicle ControlRufi RizwanNo ratings yet
- Bbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesDocument41 pagesBbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesThi KumarNo ratings yet
- INVERSIONS of MECHANISMSDocument39 pagesINVERSIONS of MECHANISMSDibakar ThakurNo ratings yet
- Inversion of MechanismsDocument15 pagesInversion of MechanismsAkunwa GideonNo ratings yet
- Table of Contents:-: - o o o o o o Singal Slider Mechanisms o Double Slider MechanismsDocument12 pagesTable of Contents:-: - o o o o o o Singal Slider Mechanisms o Double Slider MechanismsRajesh PowerNo ratings yet
- Theory of Machine - Kme 603 Question BankDocument11 pagesTheory of Machine - Kme 603 Question BankPrabal SinghNo ratings yet
- Kinematics Lab Manual GuideDocument18 pagesKinematics Lab Manual Guideshailendra_236No ratings yet
- Mechanisms of Machines Questions BankDocument30 pagesMechanisms of Machines Questions BankSathis KumarNo ratings yet
- Tutorial-1 Sub:-Kinematics of MachineDocument11 pagesTutorial-1 Sub:-Kinematics of MachineParth JadavNo ratings yet
- Inversion of Mechanisms for Changing Motion TypesDocument78 pagesInversion of Mechanisms for Changing Motion TypesQasim AliNo ratings yet
- Mechanisms BasicsDocument64 pagesMechanisms BasicsarulmuruganNo ratings yet
- KOM Unit-1 PDFDocument18 pagesKOM Unit-1 PDFpuneethNo ratings yet
- MECHANICAL ENGINEERING QUESTION BANKDocument34 pagesMECHANICAL ENGINEERING QUESTION BANKbalajimetturNo ratings yet
- UNIT-I_TOMDocument37 pagesUNIT-I_TOMBandi KumarreddyNo ratings yet
- Kinematics of MachinesDocument40 pagesKinematics of MachinesAravind MuddebihalNo ratings yet
- Lec 6Document101 pagesLec 6Murugan NadarajanNo ratings yet
- Theory of Machine ReportDocument10 pagesTheory of Machine ReportABDULREHMAN RASHEEDNo ratings yet
- Kinematics and Theory of MachinesDocument109 pagesKinematics and Theory of MachinesSachin BahugunaNo ratings yet
- Lecturer Notes - Kinematics of MachineryDocument65 pagesLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Me6401 Kom Notes RejinpaulDocument64 pagesMe6401 Kom Notes RejinpaulkjsdjsdaNo ratings yet
- Fundamentals of MechanismsDocument10 pagesFundamentals of MechanismsEG209/108489/21 ISAAC DUNCAN MWENDWANo ratings yet
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- Bme Lab Manual FeDocument37 pagesBme Lab Manual FeArpit PangariaNo ratings yet
- Kinematics of Machinery All Units MaterialDocument77 pagesKinematics of Machinery All Units Materialuma deviNo ratings yet
- Six Bar Slider Crank PowerDocument6 pagesSix Bar Slider Crank Powersuraj dhulannavarNo ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Note 1440423033Document17 pagesNote 1440423033Siva GaneshNo ratings yet
- Unit IDocument33 pagesUnit IThe sky BlueNo ratings yet
- Mechanisms & Machines: Direction Irrespective of The Direction of Force Applied. ExampleDocument12 pagesMechanisms & Machines: Direction Irrespective of The Direction of Force Applied. ExampleSyed RoshanNo ratings yet
- TOM Exp.Document9 pagesTOM Exp.Aneesh KumarNo ratings yet
- Kinematics of Machinery NotesDocument25 pagesKinematics of Machinery Notesnishanth87No ratings yet
- Introduction to Kinematic Chains and InversionsDocument41 pagesIntroduction to Kinematic Chains and InversionsB03Kavya MNo ratings yet
- TOM EME-653 lAB MANUAL1Document41 pagesTOM EME-653 lAB MANUAL1kotika_somarajuNo ratings yet
- Planar Linkages: Looking For GATE Preparation Material? Join & Get Here Now!Document9 pagesPlanar Linkages: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- Inversion of MechanismDocument6 pagesInversion of MechanismAakuchikuNo ratings yet
- Inversion of The MechanismDocument5 pagesInversion of The MechanismRanjit Rajendran100% (1)
- Lecture - 2 - Inversion of MechanismDocument34 pagesLecture - 2 - Inversion of MechanismGorkha EngineeringNo ratings yet
- Tom ImpDocument27 pagesTom Impcorruptmail760No ratings yet
- Planar Linkages Mechanism GuideDocument8 pagesPlanar Linkages Mechanism GuideAlbert ArominNo ratings yet
- Experiment No. 5 Objective: Four Bar Mechanism (Fig 5.1)Document6 pagesExperiment No. 5 Objective: Four Bar Mechanism (Fig 5.1)Waqas IbrahimNo ratings yet
- Kinematic Link ClassificationDocument18 pagesKinematic Link ClassificationBiswajeet MaharanaNo ratings yet
- KinematicsDocument25 pagesKinematicsjsph021603No ratings yet
- 2marks With AnswerDocument17 pages2marks With AnswerMECH HODNo ratings yet
- Chapter 2 HandoutDocument12 pagesChapter 2 HandoutRobel Metiku100% (1)
- Kom Unit 1 Notes: Types of Constrained MotionsDocument7 pagesKom Unit 1 Notes: Types of Constrained MotionsParkunam RandyNo ratings yet
- Theory of Machines - Module 1 NotesDocument25 pagesTheory of Machines - Module 1 NotesrrcsdocsNo ratings yet
- Module 1 & First Half of 2 - Two Marks Q & ADocument8 pagesModule 1 & First Half of 2 - Two Marks Q & AMOHAMMED ZAHID BNo ratings yet
- Chapter Two 2. Linkages MechanismsDocument41 pagesChapter Two 2. Linkages Mechanismssamuel mechNo ratings yet
- Mechanics of Machines Part 1Document27 pagesMechanics of Machines Part 1kimosave99No ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Square Wave Generator Using Op Amp - WaveformsDocument5 pagesSquare Wave Generator Using Op Amp - WaveformsNagendrababu VasaNo ratings yet
- Square Wave Generator Using Op Amp - WaveformsDocument5 pagesSquare Wave Generator Using Op Amp - WaveformsNagendrababu VasaNo ratings yet
- Triangular Wave Generator Using Op Amp - WaveformsDocument6 pagesTriangular Wave Generator Using Op Amp - WaveformsNagendrababu VasaNo ratings yet
- MCUPQCDocument8 pagesMCUPQCSrinivasa ReddyNo ratings yet
- Standard PPT Template MNRDocument1 pageStandard PPT Template MNRNagendrababu VasaNo ratings yet
- Triangular Wave Generator Using Op Amp - WaveformsDocument6 pagesTriangular Wave Generator Using Op Amp - WaveformsNagendrababu VasaNo ratings yet
- Statement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceDocument57 pagesStatement of Account: Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceNagendrababu VasaNo ratings yet
- DAC ADC Types Explained Download from ECESCHOOLDocument18 pagesDAC ADC Types Explained Download from ECESCHOOLNagendrababu VasaNo ratings yet
- Bee Notes - 1Document1 pageBee Notes - 1Nagendrababu VasaNo ratings yet
- Intro To Electricity465Document61 pagesIntro To Electricity465Nagendrababu VasaNo ratings yet
- Scan Doc by CamScannerDocument1 pageScan Doc by CamScannerNagendrababu VasaNo ratings yet
- AECLABDocument56 pagesAECLABMallik KglNo ratings yet
- Kinematics of MachineDocument314 pagesKinematics of MachineMd Ibrahim KhanNo ratings yet
- ChemDocument2 pagesChemNagendrababu VasaNo ratings yet
- Transmission: Examination, June/JulyDocument2 pagesTransmission: Examination, June/JulyNagendrababu VasaNo ratings yet
- Brake Test On DC Shunt MachineDocument9 pagesBrake Test On DC Shunt MachineNagendrababu VasaNo ratings yet
- 4-1 CSE R13 Syllabus PDFDocument23 pages4-1 CSE R13 Syllabus PDFNagendrababu VasaNo ratings yet
- Computer Organization Lab Manual for II Year B.Tech StudentsDocument44 pagesComputer Organization Lab Manual for II Year B.Tech StudentsNagendrababu Vasa100% (1)
- Extra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterDocument52 pagesExtra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterNagendrababu VasaNo ratings yet
- Extra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterDocument52 pagesExtra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterNagendrababu VasaNo ratings yet
- 01 Verification of Ohms LawDocument3 pages01 Verification of Ohms LawNagendrababu VasaNo ratings yet
- Extra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterDocument52 pagesExtra High Voltage Ac Transmission B.Tech Iv Year-Ii SemesterNagendrababu VasaNo ratings yet
- Verifying Ohm's Law ExperimentDocument3 pagesVerifying Ohm's Law ExperimentManju MathurNo ratings yet
- The History of Stiffness-MethodDocument9 pagesThe History of Stiffness-MethodStella GibsonNo ratings yet
- Chap 6Document29 pagesChap 6Nagendrababu VasaNo ratings yet
- Job Safety Analysis (14) For Cable Laying and PullingDocument4 pagesJob Safety Analysis (14) For Cable Laying and Pullingnasar_mahsood79% (34)
- 330-15000WTRSeries May03 PDFDocument31 pages330-15000WTRSeries May03 PDFRadhey Shyam GuptaNo ratings yet
- Drilling Engineering GuideDocument282 pagesDrilling Engineering GuideDavid KlinkenbergNo ratings yet
- Bosch Actuator en EmcDocument64 pagesBosch Actuator en EmcRuben PauwelsNo ratings yet
- How To Turn A Dy11 Transformer Into A Dy1Document2 pagesHow To Turn A Dy11 Transformer Into A Dy1Walter Andres Estevez Vasquez100% (1)
- 1 - Pedal Drilling Machine ReportDocument26 pages1 - Pedal Drilling Machine ReportParamesh Waran [049]No ratings yet
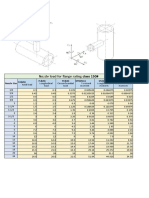
- Nozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)Document6 pagesNozzle Load For Flange Rating Class 150#: Nozzle Size Fa (KN) FL (KN) FC (KN) MT (KNM) ML (KNM) MC (KNM)olekNo ratings yet
- Condor TailsDocument6 pagesCondor TailsEnrique CoronelNo ratings yet
- TBM vs D&B MethodsDocument30 pagesTBM vs D&B MethodsAbhinav Singh ChauhanNo ratings yet
- The Great SqueezeDocument18 pagesThe Great Squeezedeming9120No ratings yet
- Maintenant Part - Recc. ListDocument4 pagesMaintenant Part - Recc. ListNguyen TrungNo ratings yet
- Smith-Jaeger - Chronometric OverhaulDocument4 pagesSmith-Jaeger - Chronometric OverhaulDamian RoweNo ratings yet
- Design and Fabrication of Movable Jib Crane 2020-21Document15 pagesDesign and Fabrication of Movable Jib Crane 2020-21Chandan S RNo ratings yet
- Hydro-Lift Core Catcher Technical Data SheetDocument2 pagesHydro-Lift Core Catcher Technical Data Sheethaoues23No ratings yet
- G Code M CodeDocument2 pagesG Code M CodeFAJAR PRASETYA 171244012No ratings yet
- Cable Tray Sleeper and Support Design 3Document5 pagesCable Tray Sleeper and Support Design 3Elmokadem EinsteinNo ratings yet
- Actuator Instruction Manual - RCEL015-250Document2 pagesActuator Instruction Manual - RCEL015-250Josue Reyes GironNo ratings yet
- 02-04b Brazil Hydraulic Connectors, Level 2-1st EditionDocument13 pages02-04b Brazil Hydraulic Connectors, Level 2-1st EditionFelipe TavaresNo ratings yet
- Atlas Copco FD DryersDocument12 pagesAtlas Copco FD DryersSherif AdelNo ratings yet
- Materials Approval ListDocument4 pagesMaterials Approval ListBala Krishna GallaNo ratings yet
- Control Theory & PracticeDocument10 pagesControl Theory & Practicevikram ruhilNo ratings yet
- 48.01.SH.01.TP.004 Punch ListDocument6 pages48.01.SH.01.TP.004 Punch ListcgnanaponNo ratings yet
- Flanges and Their Joints - Dimensions of Gaskets For Class-Designated FlangesDocument6 pagesFlanges and Their Joints - Dimensions of Gaskets For Class-Designated FlangesQC RegianNo ratings yet
- Vibration Control (Simrit)Document117 pagesVibration Control (Simrit)ismailNo ratings yet
- 024 - Mechanical Properties of Fasteners Made of Carbon Steel and Alloy Steel PDFDocument1 page024 - Mechanical Properties of Fasteners Made of Carbon Steel and Alloy Steel PDFRonak RanaNo ratings yet
- C Me 130 PDFDocument13 pagesC Me 130 PDFmetaslaNo ratings yet
- Member With Pure Torsion: Example 1Document20 pagesMember With Pure Torsion: Example 1Helen Negash100% (2)
- SHORTSTOPP® Welding Fittings - TDWDocument3 pagesSHORTSTOPP® Welding Fittings - TDWsheikbba100% (1)
- Disk Brakes:: How Do Disc Brakes Work?Document5 pagesDisk Brakes:: How Do Disc Brakes Work?Dharam JagroopNo ratings yet
- Datasheet A S50iaDocument2 pagesDatasheet A S50iavantuan17792No ratings yet