You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Canada Email Wire 2023Document15 pagesCanada Email Wire 2023Mac AppleNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- FSM Annual Fire Safety ReportDocument7 pagesFSM Annual Fire Safety ReportAman DeepNo ratings yet
- Porter Five Forces - Textile Sector - 1Document1 pagePorter Five Forces - Textile Sector - 1Aman Deep100% (1)
- Doosan DL450 Wheel Loader Service Repair Workshop ManualDocument10 pagesDoosan DL450 Wheel Loader Service Repair Workshop ManualManuals CE & Ag33% (3)
- MBU 1000 User Manual PDFDocument11 pagesMBU 1000 User Manual PDFpijanderNo ratings yet
- The Six Main Function of HR Are RecruitmentDocument2 pagesThe Six Main Function of HR Are RecruitmentAman DeepNo ratings yet
- H1: Information Seeking Will Positively Influence The Users' Intention To Share Content in Social MediaDocument5 pagesH1: Information Seeking Will Positively Influence The Users' Intention To Share Content in Social MediaAman DeepNo ratings yet
- Factors Influencing Willingness-To-Pay For The Energy Stars LabelDocument1 pageFactors Influencing Willingness-To-Pay For The Energy Stars LabelAman DeepNo ratings yet
- An Empirical Study On Consumer Behaviour Towards Refrigerators in Bangalore City - January - 2013 - 1469176598 - 2001036Document4 pagesAn Empirical Study On Consumer Behaviour Towards Refrigerators in Bangalore City - January - 2013 - 1469176598 - 2001036Aman DeepNo ratings yet
- International Marketing Conference BrochureDocument8 pagesInternational Marketing Conference BrochureAman DeepNo ratings yet
- Etb 065-040-125 GGDocument5 pagesEtb 065-040-125 GGAman DeepNo ratings yet
- GMPE - Atlantic Computer CaseDocument5 pagesGMPE - Atlantic Computer CaseAman Deep100% (1)
- 10 Point Guide To Humidity Control in Textile Manufacturing en RT PDFDocument12 pages10 Point Guide To Humidity Control in Textile Manufacturing en RT PDFAman DeepNo ratings yet
- Org Beh and Leadership PHDDocument5 pagesOrg Beh and Leadership PHDAman DeepNo ratings yet
- Offer DriveDocument1 pageOffer DriveAman DeepNo ratings yet
- CertificateDocument1 pageCertificateAman DeepNo ratings yet
- Efficiency DetailsDocument1 pageEfficiency DetailsAman DeepNo ratings yet
- Subject:-Installation of AC Drive For Radial Fan For Carding H-PlantDocument1 pageSubject:-Installation of AC Drive For Radial Fan For Carding H-PlantAman DeepNo ratings yet
- FPM 2017 Batch ProfileDocument6 pagesFPM 2017 Batch ProfileAman DeepNo ratings yet
- IE4 Motor Technical Data ABBDocument1 pageIE4 Motor Technical Data ABBAman DeepNo ratings yet
- Plant MotorDocument6 pagesPlant MotorAman DeepNo ratings yet
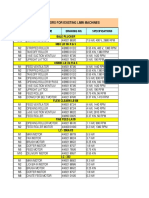
- MAINTENANCE MANUAL - Lakshmi Caipo Easy Slub Yarn UnitDocument2 pagesMAINTENANCE MANUAL - Lakshmi Caipo Easy Slub Yarn UnitAman DeepNo ratings yet
- Term - 2Document1 pageTerm - 2Aman DeepNo ratings yet
- Quant Concepts FormulaeDocument12 pagesQuant Concepts FormulaeAman DeepNo ratings yet
- IE4 Motor Technical Data ABBDocument1 pageIE4 Motor Technical Data ABBAman DeepNo ratings yet
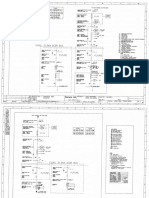
- SLDDocument3 pagesSLDAman DeepNo ratings yet
- Valve Standards in The PetrochemicalDocument5 pagesValve Standards in The PetrochemicalSohaib ZafarNo ratings yet
- Ieee 802.1XDocument1 pageIeee 802.1Xravi kantNo ratings yet
- Computer Studies Form 2 Schemes of WorkDocument11 pagesComputer Studies Form 2 Schemes of Workvusani ndlovuNo ratings yet
- Emuge Machos LaminadoresDocument28 pagesEmuge Machos LaminadoresBeto MenaldoNo ratings yet
- 1 RADWIN 2000 C PTP SE1Document85 pages1 RADWIN 2000 C PTP SE1Vero DuranNo ratings yet
- Noon PPDocument18 pagesNoon PPAlex ZodNo ratings yet
- Split Cycle EngineDocument2 pagesSplit Cycle EngineNani KotaNo ratings yet
- Interaction Design BasicsDocument78 pagesInteraction Design BasicsM Husnain ShahidNo ratings yet
- 350 DFCC Exhaust Emission Data - Eds-114Document1 page350 DFCC Exhaust Emission Data - Eds-114ZJ Limited (ZJLimited)No ratings yet
- Dart in ActionDocument37 pagesDart in ActionEwketbirhan AlemuNo ratings yet
- Dayang Enterprise Sdn. BHD.: Inspection and Test Plan (Electrical)Document3 pagesDayang Enterprise Sdn. BHD.: Inspection and Test Plan (Electrical)AmyNo ratings yet
- ''Outlook QuestionsDocument7 pages''Outlook QuestionsRitesh KatalkarNo ratings yet
- Vibration Test Report According To IEC 60068 3-3-1991 Level 3Document13 pagesVibration Test Report According To IEC 60068 3-3-1991 Level 3elias2505No ratings yet
- Get Unlimited Downloads With A Free Scribd Trial!Document2 pagesGet Unlimited Downloads With A Free Scribd Trial!Neatha ChimNo ratings yet
- Kaizen Continuous Improvement PhilosophyDocument69 pagesKaizen Continuous Improvement PhilosophyNur Alya Hidayah SairiNo ratings yet
- E79000-2-04-13 FS Buch WWWDocument291 pagesE79000-2-04-13 FS Buch WWWDenis JimenezNo ratings yet
- Sinamics Fault Codes 2011Document56 pagesSinamics Fault Codes 2011mangesh chidrawarNo ratings yet
- Owners Handbook BUKH U125Document79 pagesOwners Handbook BUKH U125Alexandros KontosNo ratings yet
- Part ManualDocument89 pagesPart ManualThe Dat100% (1)
- Multi String Cutting MSC Tool Rev001Document1 pageMulti String Cutting MSC Tool Rev001CoolProphetNo ratings yet
- Adaptive Head Light SystemDocument11 pagesAdaptive Head Light Systemrock starNo ratings yet
- Outlook TroubleshootingDocument17 pagesOutlook TroubleshootingYokesh ElangovanNo ratings yet
- Customers and MarketsDocument23 pagesCustomers and MarketsKen GorresNo ratings yet
- Cyberoam Hotpin Integration GuideDocument5 pagesCyberoam Hotpin Integration GuidePavankumar RavinuthalaNo ratings yet
- Curriculum CEDocument2 pagesCurriculum CEМарин ДрагановNo ratings yet
- BC0160036 - CyberLawDocument16 pagesBC0160036 - CyberLawNiraj KumarNo ratings yet
- The Power of Simplicity: by Sudhir SoniDocument8 pagesThe Power of Simplicity: by Sudhir SoniRohitNo ratings yet