You might also like
- Helicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsFrom EverandHelicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsRating: 5 out of 5 stars5/5 (1)
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Cheat Sheet PrintDocument2 pagesCheat Sheet Printlimchongheng_30No ratings yet
- Control Surface Sizing: Level Flight TrimDocument14 pagesControl Surface Sizing: Level Flight Trima320neoNo ratings yet
- Supplemental Data: Aero 315Document46 pagesSupplemental Data: Aero 315joelmcramerNo ratings yet
- Aircraft Parameters by Ying HuoDocument10 pagesAircraft Parameters by Ying HuoMohtashimAliKazmiNo ratings yet
- Structural Airplane DesignDocument7 pagesStructural Airplane DesignJio GayonNo ratings yet
- Crj-700 Fom ManualDocument843 pagesCrj-700 Fom ManualFernando Martínez100% (5)
- Lapangan Terbang 2015-5Document17 pagesLapangan Terbang 2015-5Rahardian Gusta PatriaNo ratings yet
- Joint Heavy Lift (JHL) - JSF Lift Fan DerivativeDocument43 pagesJoint Heavy Lift (JHL) - JSF Lift Fan Derivativeflateric74@yandex.ruNo ratings yet
- Takeoff Landing PDFDocument31 pagesTakeoff Landing PDFMohamad KhairNo ratings yet
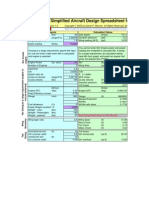
- Raymer Simplified Aircraft Design SpreadsheetDocument9 pagesRaymer Simplified Aircraft Design SpreadsheetHome Sete100% (2)
- Procedure 737 400 (Final)Document7 pagesProcedure 737 400 (Final)pike596No ratings yet
- SaidaDocument1 pageSaidaPhellypeNo ratings yet
- Test Results For 1A1Document8 pagesTest Results For 1A1Danang YunantoNo ratings yet
- Ostiv Presentation V2Document37 pagesOstiv Presentation V2Ganesh GPNo ratings yet
- Raymer Simplified Aircraft Design SpreadsheetDocument13 pagesRaymer Simplified Aircraft Design SpreadsheetRajeuv GovindanNo ratings yet
- Model Cessna 182Document472 pagesModel Cessna 182hr290952No ratings yet
- TL 1.15 Example Aircraft Loading CalculationsDocument22 pagesTL 1.15 Example Aircraft Loading Calculationsachyutha_krishnaNo ratings yet
- Performance Analysis of A Piston Engined AirplaneDocument50 pagesPerformance Analysis of A Piston Engined AirplaneANo ratings yet
- Engineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsDocument8 pagesEngineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsJelena BauerNo ratings yet
- Configuration Aerodynamics of the High Performance ASW 22 BL SailplaneDocument20 pagesConfiguration Aerodynamics of the High Performance ASW 22 BL SailplaneRene QueirozNo ratings yet
- Aircraft Design 30Document23 pagesAircraft Design 30Paul GernahNo ratings yet
- Aircraft Design Project - Phase 2Document64 pagesAircraft Design Project - Phase 2Sultan BadhushaNo ratings yet
- Primary Flight ControlsDocument8 pagesPrimary Flight ControlsJonathan CruzNo ratings yet
- Light Aircraft Aircraft DesignDocument20 pagesLight Aircraft Aircraft DesignLacci123100% (2)
- Bombardier CRJ 00-Airplane GeneralDocument50 pagesBombardier CRJ 00-Airplane GeneralJP Zemog100% (1)
- Wind and Earthquake Analysis Results SummaryDocument8 pagesWind and Earthquake Analysis Results SummaryBrahim HammamiNo ratings yet
- TAKEOFF2 ManfDocument4 pagesTAKEOFF2 Manfrudy_423522658No ratings yet
- MS FSX Wilco 737 ChecklistDocument11 pagesMS FSX Wilco 737 ChecklistAbra CadabraNo ratings yet
- Data For Heli Rotor ValidationDocument135 pagesData For Heli Rotor ValidationKaradiasNo ratings yet
- MATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTDocument8 pagesMATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTD.Viswanath100% (1)
- AAE 3104 CH 3 Constraint Analysis and Aircraft SizingDocument44 pagesAAE 3104 CH 3 Constraint Analysis and Aircraft SizingDpt HtegnNo ratings yet
- Flight ControlsDocument51 pagesFlight ControlsJonathan FajardoNo ratings yet
- PPL Helicopter Performance ManualDocument16 pagesPPL Helicopter Performance ManualTuckct100% (1)
- Arducopter PerametersDocument156 pagesArducopter PerameterssammyNo ratings yet
- Chapter 6 PerformanceDocument111 pagesChapter 6 PerformanceLenh Nguyen0% (1)
- 5 - Configuration Aerodynamics - 2 PDFDocument11 pages5 - Configuration Aerodynamics - 2 PDFNuta ConstantinNo ratings yet
- A Mathematical Model of The UH-60 HelicopterDocument46 pagesA Mathematical Model of The UH-60 HelicopterSplash1100% (1)
- RRJ-95 Aircraft Maintenance Manual Chapter Dimensions GuideDocument118 pagesRRJ-95 Aircraft Maintenance Manual Chapter Dimensions GuideFernando Angel Ortiz RodriguezNo ratings yet
- A320 Alpha Call Up N CB LocationDocument20 pagesA320 Alpha Call Up N CB LocationReksa Karisma YogasmaraNo ratings yet
- AR Drone Control API NotesDocument3 pagesAR Drone Control API NotesWildani HadiNo ratings yet
- RRDPAE 2008 Presentation ATR72Document28 pagesRRDPAE 2008 Presentation ATR72Eduardo SawasakiNo ratings yet
- Airplane Performance & DesignDocument250 pagesAirplane Performance & Designjwzumwalt100% (17)
- Control Project: Autopilot Control B747 - FC4Document35 pagesControl Project: Autopilot Control B747 - FC4Mohamed AtefNo ratings yet
- 3-Performance Sizing@Aviation PDFsDocument82 pages3-Performance Sizing@Aviation PDFsJesús Montalvo FernándezNo ratings yet
- Aircraft Design ReportDocument95 pagesAircraft Design ReportMayank Agrawal100% (1)
- A380 AnatomyDocument7 pagesA380 Anatomydmartins23No ratings yet
- 220-Seat Commercial Aircraft Design by Bharath Institute StudentsDocument30 pages220-Seat Commercial Aircraft Design by Bharath Institute StudentsSANDEEP CHOWDARYNo ratings yet
- Equipment StructuresDocument86 pagesEquipment StructuresFauzankalibata100% (1)
- Navya Aero 3aDocument3 pagesNavya Aero 3achada12345No ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Airman Knowledge Testing Supplement for Sport Pilot, Recreational Pilot, Remote Pilot, and Private Pilot (FAA-CT-8080-2H)From EverandAirman Knowledge Testing Supplement for Sport Pilot, Recreational Pilot, Remote Pilot, and Private Pilot (FAA-CT-8080-2H)Rating: 4 out of 5 stars4/5 (1)
- Small Unmanned Fixed-wing Aircraft Design: A Practical ApproachFrom EverandSmall Unmanned Fixed-wing Aircraft Design: A Practical ApproachNo ratings yet
- Samsung Single DVD-Player Intro Standard & Karaoke ModelsDocument60 pagesSamsung Single DVD-Player Intro Standard & Karaoke ModelsparascoliNo ratings yet
- Cameleon OilerDocument48 pagesCameleon OilerKieran GabardNo ratings yet
- SAUDI ARAMCO VESSEL CLOSURE CERTIFICATEDocument1 pageSAUDI ARAMCO VESSEL CLOSURE CERTIFICATEAnonymous S9qBDVkyNo ratings yet
- It Is Best To Have A Quiet Moment ..Document5 pagesIt Is Best To Have A Quiet Moment ..Nuno AlvesNo ratings yet
- Undergraduate Selected Applicants 2012-13 Part IDocument192 pagesUndergraduate Selected Applicants 2012-13 Part IchriszaidaNo ratings yet
- Sizing a Flare Stack and Calculating Flame Distortion from Wind VelocityDocument49 pagesSizing a Flare Stack and Calculating Flame Distortion from Wind VelocityBayu AjipNo ratings yet
- Emergency Restoration SystemDocument15 pagesEmergency Restoration SystemmhergonzalesNo ratings yet
- Tanaka 2Document15 pagesTanaka 2Firani Reza ByaNo ratings yet
- Understanding How OFDM Works in WiMAXDocument8 pagesUnderstanding How OFDM Works in WiMAXHarald KerresNo ratings yet
- Mechanical Characterization of 3D Printable Concrete PDFDocument12 pagesMechanical Characterization of 3D Printable Concrete PDFManu K MohanNo ratings yet
- Isotherm Model of The Adsorption of Nitrate Ions Onto Surface of Silica From Sugarcane BagasseDocument13 pagesIsotherm Model of The Adsorption of Nitrate Ions Onto Surface of Silica From Sugarcane BagassefaniNo ratings yet
- SJ Asphalt 1Document8 pagesSJ Asphalt 1Estêvão MayrerNo ratings yet
- Sheet 19 NCSPA Design Data SheetDocument12 pagesSheet 19 NCSPA Design Data SheetVietanh PhungNo ratings yet
- Ds 108 Rondo Key LockDocument154 pagesDs 108 Rondo Key LockFauziyyah KhairunnisaaNo ratings yet
- Twingo 3 & Clio 4Document10 pagesTwingo 3 & Clio 4Alexandre Le GrandNo ratings yet
- Guideline For Grade and Compensation FitmentDocument5 pagesGuideline For Grade and Compensation FitmentVijit MisraNo ratings yet
- CAP Regulation 100-1 - 08/21/2000Document16 pagesCAP Regulation 100-1 - 08/21/2000CAP History LibraryNo ratings yet
- DR Reporting Made Easy With Report Builder 3.0Document132 pagesDR Reporting Made Easy With Report Builder 3.0robertorojasfeijoNo ratings yet
- 7150 DD RL InstallationDocument6 pages7150 DD RL InstallationMIGUELNo ratings yet
- Sr. No. Description Material Grade Length (MM) Weight (KG)Document4 pagesSr. No. Description Material Grade Length (MM) Weight (KG)Shriniwas NaikNo ratings yet
- Bruker s1 Titan Optional Accessories - PDF - 2.15 MBDocument5 pagesBruker s1 Titan Optional Accessories - PDF - 2.15 MBVesna NikolicNo ratings yet
- Test-4 SomDocument42 pagesTest-4 SomVivekMishraNo ratings yet
- Us 17 Anderson Bot Vs Bot Evading Machine Learning Malware Detection WPDocument6 pagesUs 17 Anderson Bot Vs Bot Evading Machine Learning Malware Detection WPPsicolocoNo ratings yet
- How To Setup KodiDocument20 pagesHow To Setup KodiGerardo RodríguezNo ratings yet
- Control Systems Matrix AnalysisDocument15 pagesControl Systems Matrix AnalysisJesus Enrique Colina ReyesNo ratings yet
- States of Matter PoetryDocument20 pagesStates of Matter PoetrySaqib HussainNo ratings yet
- Contoh 1 Application Letter CV Bahasa InggrisDocument6 pagesContoh 1 Application Letter CV Bahasa InggrisUlya QonitaNo ratings yet
- Can Crusher SummaryDocument14 pagesCan Crusher SummaryOsama Abdelaleem100% (1)
- SEO Pneumatic ConveyingDocument309 pagesSEO Pneumatic Conveyingcarlosiq37No ratings yet
- Motor Run Capacitors PDFDocument6 pagesMotor Run Capacitors PDFLili SugengNo ratings yet