You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Abdul Wali ResumeDocument2 pagesAbdul Wali ResumeAbdul WaliNo ratings yet
- Power Economics and ManagementDocument7 pagesPower Economics and ManagementAbdul WaliNo ratings yet
- Power Economics and Management: 2 Semester, 3 Year (13EL) B.E Electrical Engg. Program Nayyar HussainDocument8 pagesPower Economics and Management: 2 Semester, 3 Year (13EL) B.E Electrical Engg. Program Nayyar HussainAbdul WaliNo ratings yet
- Power Economics and Management Chapter #1:: 2 Semester, 3 Year (13EL) B.E Electrical Engg. Program Nayyar HussainDocument7 pagesPower Economics and Management Chapter #1:: 2 Semester, 3 Year (13EL) B.E Electrical Engg. Program Nayyar HussainAbdul WaliNo ratings yet
- Power Economics and Management Power Economics and ManagementDocument3 pagesPower Economics and Management Power Economics and ManagementAbdul WaliNo ratings yet
- China-Pakistan Economic Corridor: CPEC Vision & MissionDocument6 pagesChina-Pakistan Economic Corridor: CPEC Vision & MissionAbdul WaliNo ratings yet
- Power Economics & Management (7th Term)Document1 pagePower Economics & Management (7th Term)Abdul WaliNo ratings yet
- Chapter 1-Literature Survey 1.1Document41 pagesChapter 1-Literature Survey 1.1Abdul WaliNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Micro Centrifuge, 1524 - Service ManualDocument37 pagesMicro Centrifuge, 1524 - Service ManualTalhaNo ratings yet
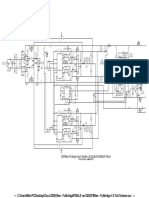
- CIRCUIT DIAGRAM of INVERTERDocument2 pagesCIRCUIT DIAGRAM of INVERTERArindam BorgohainNo ratings yet
- How To Crack ISRO - Subject Wise Study MaterialDocument4 pagesHow To Crack ISRO - Subject Wise Study Materialtummalapaliravi50% (2)
- Be Winter 2022Document2 pagesBe Winter 2022kaushal.21beect008No ratings yet
- Problemas en Valde de PCDocument15 pagesProblemas en Valde de PCCris LozoyaNo ratings yet
- Baide BT PowerDocument1 pageBaide BT PowerFirdaus YasinNo ratings yet
- Product Specification: TFT-LCD Open CellDocument22 pagesProduct Specification: TFT-LCD Open CellMahmoud Digital-DigitalNo ratings yet
- uPI Confidential: High Efficiency PMIC With Dynamic Voltage ManagementDocument42 pagesuPI Confidential: High Efficiency PMIC With Dynamic Voltage ManagementEvgeniy MiroshnichenkoNo ratings yet
- Popular Electronics 1963-11Document118 pagesPopular Electronics 1963-11Lemmy KilmisterNo ratings yet
- Catalogo VL Cepto3 y Cepto4Document274 pagesCatalogo VL Cepto3 y Cepto4paula vergaraNo ratings yet
- BP1 2-12FR PDFDocument1 pageBP1 2-12FR PDFTataru AndreiNo ratings yet
- Simulating Current Reference Sources in CMOS Integrated Circuit Design and Designing and Simulating Related Circuits With Cadence Virtuoso IC617Document16 pagesSimulating Current Reference Sources in CMOS Integrated Circuit Design and Designing and Simulating Related Circuits With Cadence Virtuoso IC617carpet909No ratings yet
- SR4A, SR6A, SR8A, SR9A, SR32A Static Voltage Regulators: FeaturesDocument4 pagesSR4A, SR6A, SR8A, SR9A, SR32A Static Voltage Regulators: FeaturesCarlos RiveraNo ratings yet
- 4 CH DMX Dimmer: InstructablesDocument7 pages4 CH DMX Dimmer: InstructablesCorrado BrianteNo ratings yet
- RT310RF Quick Guide V018 PDFDocument2 pagesRT310RF Quick Guide V018 PDFUberto LorenzettiNo ratings yet
- LT7 Ec 001 - Rev2Document5 pagesLT7 Ec 001 - Rev2Venkateswarlu KolluruNo ratings yet
- Huawei Tech Co.,LtdDocument38 pagesHuawei Tech Co.,LtdMariaCristinaAedoRojasNo ratings yet
- PL310Document2 pagesPL310Ivailo ZapryanovNo ratings yet
- Power Supplies For Photomultiplier Tube Modules: Type No. C10709 C7169 UnitDocument2 pagesPower Supplies For Photomultiplier Tube Modules: Type No. C10709 C7169 UnitCaver VelasquezNo ratings yet
- Cl17-011-Dat-El-Sacyr-005a-006 (Ri)Document17 pagesCl17-011-Dat-El-Sacyr-005a-006 (Ri)jorgeNo ratings yet
- D2KFBNeo - Fullbridge V.3b FINALEDocument1 pageD2KFBNeo - Fullbridge V.3b FINALEshandy susandiNo ratings yet
- Ta I-Series PDFDocument30 pagesTa I-Series PDFAwanNo ratings yet
- Aces Objective 6 EEDocument6 pagesAces Objective 6 EEJay TabagoNo ratings yet
- International Electrotechnical CommissionDocument10 pagesInternational Electrotechnical CommissionAkd Deshmukh0% (1)
- MCQ Unit IiDocument12 pagesMCQ Unit Iiपंकज काळेNo ratings yet
- Evolution of Insulation Piercing Connector TechnologyDocument7 pagesEvolution of Insulation Piercing Connector TechnologyJRNo ratings yet
- Pengumuman DPT Vendor Komponen TrafoDocument3 pagesPengumuman DPT Vendor Komponen Trafodenny yusufNo ratings yet
- S1L2-R1 - Technical Data SheetDocument9 pagesS1L2-R1 - Technical Data Sheetsarahalawa222No ratings yet
- BCH Price List - Wef 05.01.2021 - Low Res.. 1Document123 pagesBCH Price List - Wef 05.01.2021 - Low Res.. 1aymaanfkNo ratings yet
- P Lanscape 05 - Rev01Document12 pagesP Lanscape 05 - Rev01ALDI JONGNo ratings yet