You might also like
- Assignment 4Document2 pagesAssignment 4Komal SinghNo ratings yet
- Study of Van Emde Boas Tree With Application To Dijkstra: Advanced Problem SolvingDocument16 pagesStudy of Van Emde Boas Tree With Application To Dijkstra: Advanced Problem SolvinglucyNo ratings yet
- Daa Mod - 3-1Document14 pagesDaa Mod - 3-1Disha GudigarNo ratings yet
- DAA - Unit V - Dynamic ProgrammingDocument37 pagesDAA - Unit V - Dynamic ProgrammingnishkarshNo ratings yet
- Analysis and Design of AlgorithmDocument8 pagesAnalysis and Design of AlgorithmNaning Putrinya Budi AstutikNo ratings yet
- T&S BookDocument8 pagesT&S BookFun TimeNo ratings yet
- What Are Stacks and QueuesDocument13 pagesWhat Are Stacks and QueuesrizawanshaikhNo ratings yet
- Module 5Document41 pagesModule 5cbgopinathNo ratings yet
- Aim:-Study of FEM (Finite Element Method) Finite-Element MethodDocument9 pagesAim:-Study of FEM (Finite Element Method) Finite-Element MethodAshley Silvester AnthonyNo ratings yet
- MatroidsDocument5 pagesMatroidsDineshGargNo ratings yet
- Design and Analysis of AlgorithmDocument33 pagesDesign and Analysis of AlgorithmajNo ratings yet
- Solu 3Document28 pagesSolu 3Aswani Kumar100% (2)
- TopCoder Hungarian AlgDocument7 pagesTopCoder Hungarian AlgGeorgiAndreaNo ratings yet
- Proof Methods and Greedy Algorithms: Magnus Lie Hetland Lecture Notes, May 5th 2008Document10 pagesProof Methods and Greedy Algorithms: Magnus Lie Hetland Lecture Notes, May 5th 2008Ovidiu TirlaNo ratings yet
- Kashif Khan Assignment of Linear Algebra.Document10 pagesKashif Khan Assignment of Linear Algebra.engineerkashif97No ratings yet
- DAA Assignment 1Document7 pagesDAA Assignment 1MIKHAIEL gamingNo ratings yet
- GreedyDocument22 pagesGreedylarymarklaryNo ratings yet
- 124 - Section 1.2Document41 pages124 - Section 1.2Aesthetic DukeNo ratings yet
- Algorithms Question BankDocument15 pagesAlgorithms Question BankPablo AhmedNo ratings yet
- Least Squares OptimizationDocument8 pagesLeast Squares OptimizationAmnart L. JantharasukNo ratings yet
- Wa0005.Document5 pagesWa0005.debasis nagNo ratings yet
- A New Parallel Algorithm For Computing Minimum Spanning TreeDocument8 pagesA New Parallel Algorithm For Computing Minimum Spanning TreeijscmcNo ratings yet
- Solving Systems of Algebraic Equations: Daniel LazardDocument27 pagesSolving Systems of Algebraic Equations: Daniel LazardErwan Christo Shui 廖No ratings yet
- Ada Note HkyrsDocument129 pagesAda Note HkyrsPratik PetkarNo ratings yet
- Using The Deutsch-Jozsa Algorithm To Determine Parts of An Array and Apply A Specified Function To Each Independent PartDocument22 pagesUsing The Deutsch-Jozsa Algorithm To Determine Parts of An Array and Apply A Specified Function To Each Independent PartAman MalikNo ratings yet
- 20MCA023 Algorithm AssighnmentDocument13 pages20MCA023 Algorithm AssighnmentPratik KakaniNo ratings yet
- Expt 3 and 4 (New1)Document13 pagesExpt 3 and 4 (New1)Frenchesca Darlene CaliwliwNo ratings yet
- Unit I: Introduction: AlgorithmDocument17 pagesUnit I: Introduction: AlgorithmajNo ratings yet
- DAA Unit 5Document14 pagesDAA Unit 5hari karanNo ratings yet
- Ps1 Solution (VERY IMP)Document6 pagesPs1 Solution (VERY IMP)Omega ManNo ratings yet
- Integral CalculusDocument48 pagesIntegral CalculusVincent CortezNo ratings yet
- Soluciones A Ejercicios de ADADocument8 pagesSoluciones A Ejercicios de ADAvirybattenNo ratings yet
- Mod 3Document23 pagesMod 3Bhanuranjan S BNo ratings yet
- CHAPTER 3 Diabetes Research PaperDocument18 pagesCHAPTER 3 Diabetes Research PaperSRPC ECENo ratings yet
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 pagesCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNo ratings yet
- Informatik: Universit at Des SaarlandesDocument2 pagesInformatik: Universit at Des SaarlandesvenugopalNo ratings yet
- Finite-Element Methods With Local Triangulation R e F I N e M e N T For Continuous Reinforcement Learning ProblemsDocument13 pagesFinite-Element Methods With Local Triangulation R e F I N e M e N T For Continuous Reinforcement Learning ProblemsDanelysNo ratings yet
- DAA Unit3 Notes and QBankDocument37 pagesDAA Unit3 Notes and QBankyamuna100% (1)
- 3 IntegralsDocument33 pages3 IntegralsRupa PaulNo ratings yet
- Daa Module 1Document26 pagesDaa Module 1Abhishek DubeyNo ratings yet
- Homework 5: Fitting: Problem 1: Parity-Violating AsymmetryDocument7 pagesHomework 5: Fitting: Problem 1: Parity-Violating AsymmetryLevi GrantzNo ratings yet
- AND Operation Using NNDocument53 pagesAND Operation Using NNsd1802No ratings yet
- CH 3Document47 pagesCH 3menberNo ratings yet
- CH 20Document11 pagesCH 20aNo ratings yet
- Lecture5p 1ppDocument57 pagesLecture5p 1ppMrZaggyNo ratings yet
- PerssonAndStrang MeshGeneratorDocument17 pagesPerssonAndStrang MeshGeneratorJeff HNo ratings yet
- Calculating A Path AlgorithmDocument13 pagesCalculating A Path AlgorithmredgoriyaNo ratings yet
- UNIT - 4 Advanced Algorithm PDFDocument36 pagesUNIT - 4 Advanced Algorithm PDFbharat emandiNo ratings yet
- Algebra MatricialDocument17 pagesAlgebra MatricialjoelmulatosanchezNo ratings yet
- Experiment 3 - Numerical IntegrationDocument7 pagesExperiment 3 - Numerical IntegrationTTK MARVINNo ratings yet
- Maths Economics Notes Boston Uni PDFDocument51 pagesMaths Economics Notes Boston Uni PDFGaurav JakhuNo ratings yet
- File File Class 12 1634898038 1638956964Document28 pagesFile File Class 12 1634898038 1638956964Vinay BadapuNo ratings yet
- Dynamic Programming Vs Greedy MEthodDocument33 pagesDynamic Programming Vs Greedy MEthodSIDDHARTH NAHARNo ratings yet
- Summary QM2 Math IBDocument50 pagesSummary QM2 Math IBIvetteNo ratings yet
- The Assignment ProblemDocument6 pagesThe Assignment ProblemArmaan ANo ratings yet
- Final ExamDocument5 pagesFinal ExamSebastianCaceresNo ratings yet
- Calculus 3Document10 pagesCalculus 3Hubab AhmadNo ratings yet
- HocsDocument5 pagesHocsyygorakindyyNo ratings yet
- Lab 1Document11 pagesLab 1RanaAshNo ratings yet
- D U M Com LetterDocument1 pageD U M Com LetterSRS FirstGradeDegreeCollegeNo ratings yet
- Nataraja D H ResumeDocument3 pagesNataraja D H ResumeSRS FirstGradeDegreeCollegeNo ratings yet
- Problem No 3: A, B and C Are Members of AOP Sharing Profits and Losses in The Ratio of 2:2:1 Following IsDocument1 pageProblem No 3: A, B and C Are Members of AOP Sharing Profits and Losses in The Ratio of 2:2:1 Following IsSRS FirstGradeDegreeCollegeNo ratings yet
- Pre Survey TestDocument4 pagesPre Survey TestSRS FirstGradeDegreeCollegeNo ratings yet
- PlacementDocument1 pagePlacementSRS FirstGradeDegreeCollegeNo ratings yet
- Normative and Positive. Normative Focuses On Prescriptive Statements, and Help Establish Rules AimedDocument3 pagesNormative and Positive. Normative Focuses On Prescriptive Statements, and Help Establish Rules AimedSRS FirstGradeDegreeCollegeNo ratings yet
- Problem No 3: A, B and C Are Members of AOP Sharing Profits and Losses in The Ratio of 2:2:1 Following IsDocument1 pageProblem No 3: A, B and C Are Members of AOP Sharing Profits and Losses in The Ratio of 2:2:1 Following IsSRS FirstGradeDegreeCollegeNo ratings yet
- Report EditDocument38 pagesReport EditSRS FirstGradeDegreeCollegeNo ratings yet
- Miracle Mills 300 Series Hammer MillsDocument2 pagesMiracle Mills 300 Series Hammer MillsSNo ratings yet
- Ut 621024Document14 pagesUt 621024DarleiDuarteNo ratings yet
- One Wavelength To Loop SkywireDocument2 pagesOne Wavelength To Loop SkywireRobert TurnerNo ratings yet
- Occupational Therapy Examination Review Guide 4th Edition Ebook PDFDocument57 pagesOccupational Therapy Examination Review Guide 4th Edition Ebook PDFrobert.campbell485No ratings yet
- The First-Fourth Books of The HitopadésaDocument116 pagesThe First-Fourth Books of The HitopadésaMiguel RosaNo ratings yet
- 1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleDocument9 pages1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleBearium YTNo ratings yet
- Application Bright Ideas Education Grant Program For TeachersDocument6 pagesApplication Bright Ideas Education Grant Program For Teachersapi-320983699No ratings yet
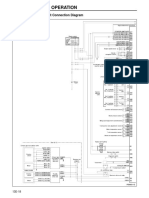
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- SCM 2011 PDFDocument4 pagesSCM 2011 PDFAakash KumarNo ratings yet
- Centralized PurchasingDocument2 pagesCentralized PurchasingbiyyamobulreddyNo ratings yet
- 01.introduction To Earth ScienceDocument29 pages01.introduction To Earth ScienceIshan Chua100% (1)
- Critique of Violence - Walter BenjaminDocument14 pagesCritique of Violence - Walter BenjaminKazım AteşNo ratings yet
- Pearson Letter To ParentsDocument2 pagesPearson Letter To ParentsPatricia WillensNo ratings yet
- Literature Review On Parking SpaceDocument6 pagesLiterature Review On Parking Spacefvgy6fn3100% (1)
- NeedScope On TechnologyDocument22 pagesNeedScope On TechnologyNguyen Ngo Dinh PhuongNo ratings yet
- Detailed Lesson Plan in Mathematics 10 I. ObjectivesDocument4 pagesDetailed Lesson Plan in Mathematics 10 I. ObjectivesLouis Fetilo FabunanNo ratings yet
- Researchpaper Should Removable Media Be Encrypted - PDF - ReportDocument15 pagesResearchpaper Should Removable Media Be Encrypted - PDF - ReportSakshi Dhananjay KambleNo ratings yet
- Pradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - LiDocument338 pagesPradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - Lisujan subediNo ratings yet
- TM 9-1425-429-12-HR - Stinger - Training - Set - 1983 PDFDocument34 pagesTM 9-1425-429-12-HR - Stinger - Training - Set - 1983 PDFWurzel1946No ratings yet
- Compressor-Less: Historical ApplicationsDocument70 pagesCompressor-Less: Historical Applicationssuryakantshrotriya100% (1)
- Grade 8 - EnglishDocument2 pagesGrade 8 - EnglishTCHR KIMNo ratings yet
- UntitledDocument37 pagesUntitledUnknown UserNo ratings yet
- 20160323110112-Sae 1215Document1 page20160323110112-Sae 1215awesome_600No ratings yet
- Alignment Technique - The Steam TurbineDocument2 pagesAlignment Technique - The Steam TurbineRajeswar KulanjiNo ratings yet
- Rule Based ClassificationsDocument14 pagesRule Based ClassificationsAmrusha NaallaNo ratings yet
- Entropy Equation For A Control VolumeDocument12 pagesEntropy Equation For A Control VolumenirattisaikulNo ratings yet
- SFN ProfileDocument4 pagesSFN Profiledinesh panchalNo ratings yet
- Effect of Liquidity Risk On Performance of Deposit Money Banks in NigeriaDocument6 pagesEffect of Liquidity Risk On Performance of Deposit Money Banks in NigeriaEditor IJTSRDNo ratings yet
- Relations Between Lean Management and Organizational StructuresDocument12 pagesRelations Between Lean Management and Organizational StructuresRENE JAVIER PACHECO SALASNo ratings yet