You might also like
- Mercedes g240 16Document14 pagesMercedes g240 16marcosluna68100% (9)
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- Direct and Inverse Kinematics of A Serial ManipulatorDocument11 pagesDirect and Inverse Kinematics of A Serial ManipulatorjdaudpotoNo ratings yet
- Dynamics of Particles and Rigid Bodies - Rao Solutions ManualDocument271 pagesDynamics of Particles and Rigid Bodies - Rao Solutions ManualLane KirsteinNo ratings yet
- The Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel RobotDocument5 pagesThe Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel Robotfilipe o toscoNo ratings yet
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- M2.2 KinematicsDocument26 pagesM2.2 KinematicsThomas GuoNo ratings yet
- MAN 16S151,181,221,251 Helical PrintDocument14 pagesMAN 16S151,181,221,251 Helical Printhiastyl100% (10)
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- Unit 3 SolvedDocument13 pagesUnit 3 SolvedSHAHUL HAMEED.SNo ratings yet
- 2012 LabVIEW Core 2 Course ManualDocument130 pages2012 LabVIEW Core 2 Course ManualRafael Teran33% (3)
- Design Harmo Robot (English Ver.)Document40 pagesDesign Harmo Robot (English Ver.)Hiếu DươngNo ratings yet
- I K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorDocument4 pagesI K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorAbenezer bediluNo ratings yet
- The Kinematics Analysis of Robotic Arm ManipulatorDocument9 pagesThe Kinematics Analysis of Robotic Arm ManipulatorJorge Adrian Lucas SanchezNo ratings yet
- DHKJHDJKHDDDocument4 pagesDHKJHDJKHDDRavindra PawarkarNo ratings yet
- Intelligent Inverse Kinematic Control of PDFDocument12 pagesIntelligent Inverse Kinematic Control of PDFDavid ZambranoNo ratings yet
- Robotics ProjectDocument16 pagesRobotics ProjectMuhammad Abdullah YounasNo ratings yet
- Workspace Analysis and Dynamics Simulation of Manipulator Based On MatlabDocument9 pagesWorkspace Analysis and Dynamics Simulation of Manipulator Based On Matlab肯尼No ratings yet
- Kinematics Analysis of 5250 Lab-Volt 5-Dof Robot Arm: Dr. Wathik Isaa Mahdi Al-TameemiDocument9 pagesKinematics Analysis of 5250 Lab-Volt 5-Dof Robot Arm: Dr. Wathik Isaa Mahdi Al-TameemiEfren Alamillo MataNo ratings yet
- EasyChair Preprint 1619Document14 pagesEasyChair Preprint 1619paulo baptistaNo ratings yet
- 456-Math 45781 d1Document20 pages456-Math 45781 d1NAVINTHIRANPILLAY A/L VEERASAMY / UPMNo ratings yet
- Robotics Report On ABB IRBDocument19 pagesRobotics Report On ABB IRBkingdom23420% (1)
- Dynamic Behavior of A SCARA RobotDocument16 pagesDynamic Behavior of A SCARA RobotMeryem MimiNo ratings yet
- Kinematics, Dynamics and Evaluation of Energy Consumption For ABB IRB-140 Serial Robots in The Tracking of A PathDocument11 pagesKinematics, Dynamics and Evaluation of Energy Consumption For ABB IRB-140 Serial Robots in The Tracking of A PathAHMED ghribiNo ratings yet
- HibapapierDocument12 pagesHibapapierujjainbNo ratings yet
- 3D Cable-Based Parallel Robot Simulation Using PDDocument13 pages3D Cable-Based Parallel Robot Simulation Using PDRAZIQ YOUSSEFNo ratings yet
- Dynamic Behavior of A SCARA Robot by Using N-E Met PDFDocument13 pagesDynamic Behavior of A SCARA Robot by Using N-E Met PDFMeryem MimiNo ratings yet
- Icems 2019 8921951Document5 pagesIcems 2019 8921951Amir NazirNo ratings yet
- Modeling and Control of 2-DOF Robot Arm: November 2018Document9 pagesModeling and Control of 2-DOF Robot Arm: November 2018Lavinia CuldaNo ratings yet
- Bao Cao RobotDocument23 pagesBao Cao RobotCường Nguyễn Trần HữuNo ratings yet
- Modeling and Control of 2-DOF Robot ArmDocument8 pagesModeling and Control of 2-DOF Robot ArmOtter OttersNo ratings yet
- Balancing Control of Two Wheeled Mobile Robot Based On PDFDocument7 pagesBalancing Control of Two Wheeled Mobile Robot Based On PDFvinod kumarNo ratings yet
- Final Report ENPM662 SiddheshRaneDocument21 pagesFinal Report ENPM662 SiddheshRaneChristian Ismaël Tcheutchoua Takam100% (1)
- Lab 3 - Inverse and Forward KinematicsDocument9 pagesLab 3 - Inverse and Forward KinematicsRafael MarcondesNo ratings yet
- Arm Owi 535Document8 pagesArm Owi 535Felipe Apaza100% (1)
- Robot StanfordDocument8 pagesRobot StanfordLong TrầnNo ratings yet
- Exam Examples Questions With SolutionDocument9 pagesExam Examples Questions With Solutionteektak1No ratings yet
- Robot Kinematics and Dynamics ModelingDocument23 pagesRobot Kinematics and Dynamics ModelingshitalchiddarwarNo ratings yet
- Ume805 4Document2 pagesUme805 4Raunaq SinghNo ratings yet
- Forward and Inverse Kinematics of A Delta Robot With CGA5Document13 pagesForward and Inverse Kinematics of A Delta Robot With CGA5Chí Long NguyễnNo ratings yet
- FANUC 200ib Robot DescriptionDocument5 pagesFANUC 200ib Robot DescriptionAnurag KesariNo ratings yet
- Inverse Kinematics Analysis For Manipulator Robot With Wrist Offset Based On The Closed-Form AlgorithmDocument9 pagesInverse Kinematics Analysis For Manipulator Robot With Wrist Offset Based On The Closed-Form AlgorithmAI Coordinator - CSC JournalsNo ratings yet
- Murcia 2018Document11 pagesMurcia 2018Nguyễn Khải ÂnNo ratings yet
- Icrom 2014 6990957Document6 pagesIcrom 2014 6990957Aleyna ArslanNo ratings yet
- Design, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareDocument10 pagesDesign, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization Softwareswag bucksNo ratings yet
- Direct Kinematic Modeling of 6R Robot Using Robotics ToolboxDocument4 pagesDirect Kinematic Modeling of 6R Robot Using Robotics ToolboxNedim BabicNo ratings yet
- High Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmDocument24 pagesHigh Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmRameez HayatNo ratings yet
- Seemandhra - Co.in - Robotics-1 - 0Document1 pageSeemandhra - Co.in - Robotics-1 - 0Samiullah MohammedNo ratings yet
- Sensor Less Control For IM Via Fuzzy Observer DesignDocument6 pagesSensor Less Control For IM Via Fuzzy Observer Designsajs201100% (1)
- Robotics Question BankDocument8 pagesRobotics Question BankmsckoneruNo ratings yet
- Compiled QB Mech 8thDocument36 pagesCompiled QB Mech 8thGyanesh RaoNo ratings yet
- Intro To Robotics, Research PaperDocument3 pagesIntro To Robotics, Research PaperbestatscienceNo ratings yet
- E186Document2 pagesE186asit kumarNo ratings yet
- Pick and Place Robot Using The Centre of Gravity Value of The Moving ObjectDocument5 pagesPick and Place Robot Using The Centre of Gravity Value of The Moving ObjectLuật NguyễnNo ratings yet
- Modelling and Simulation of 5 DOFDocument6 pagesModelling and Simulation of 5 DOFaditdharkarNo ratings yet
- MAB 2083 Mechanics of Machines: Design Project MR Azman Bin ZainuddinDocument18 pagesMAB 2083 Mechanics of Machines: Design Project MR Azman Bin ZainuddinsheikhtokNo ratings yet
- FW Kinematic and Jacobian of Fanuc-Lr-Mate-200cDocument12 pagesFW Kinematic and Jacobian of Fanuc-Lr-Mate-200cVer TexNo ratings yet
- Gallina2001 Article 3-dOFWireDrivenPlanarHapticIntDocument14 pagesGallina2001 Article 3-dOFWireDrivenPlanarHapticIntThanh Hai NguyenNo ratings yet
- Position Control of Pick and Place Robotic ArmDocument5 pagesPosition Control of Pick and Place Robotic Armavinashs2410_41108610% (1)
- Single Axis Text I J Mic 08075 FinalDocument26 pagesSingle Axis Text I J Mic 08075 Finalali almorsedNo ratings yet
- ADAMS/MATLAB Co SimulationDocument6 pagesADAMS/MATLAB Co SimulationkranthiNo ratings yet
- 438 826 1 SMDocument6 pages438 826 1 SMimtiyazNo ratings yet
- Practical Session 3: Inverse Dynamics: Arturo Gil AparicioDocument15 pagesPractical Session 3: Inverse Dynamics: Arturo Gil AparicioJpablo MartinezNo ratings yet
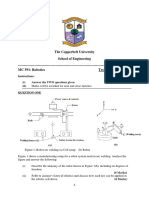
- Instructions: (I) Answer The TWO Questions Given (Ii) Question OneDocument4 pagesInstructions: (I) Answer The TWO Questions Given (Ii) Question OneCephas Mpandika KalemboNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Campos MagneticosDocument7 pagesCampos MagneticosRafael TeranNo ratings yet
- Microcontroller Based Applied Digital ControlDocument313 pagesMicrocontroller Based Applied Digital Control_rhc_No ratings yet
- Variables Separables: Rafael Teran PachecoDocument4 pagesVariables Separables: Rafael Teran PachecoRafael TeranNo ratings yet
- Steering Wheel GearboxesDocument13 pagesSteering Wheel Gearboxesparag narkhedeNo ratings yet
- Manual Transmission and DifferentialDocument1 pageManual Transmission and DifferentialJeff PascoeNo ratings yet
- Gear Design Lecture MCL211 Course RKP 28-10-2022Document105 pagesGear Design Lecture MCL211 Course RKP 28-10-2022ShubhamNo ratings yet
- Romanov Extrenal Structure of HTDocument6 pagesRomanov Extrenal Structure of HTZachary LeeNo ratings yet
- Tom Two Mark QuestionDocument23 pagesTom Two Mark QuestionTamil SelvanNo ratings yet
- Differential GearDocument20 pagesDifferential GearSalman SaifuddinNo ratings yet
- Lecture 2Document18 pagesLecture 2Henry biuwovwiNo ratings yet
- EM 253 Lecture 3 - Kinematics (II)Document15 pagesEM 253 Lecture 3 - Kinematics (II)Moosa GhedanNo ratings yet
- Jaw Rotation in Dysarthria Measured With A Single Electromagnetic Articulography SensorDocument15 pagesJaw Rotation in Dysarthria Measured With A Single Electromagnetic Articulography SensorRosario Lartiga MazryNo ratings yet
- Chapter Two 2. Linkages MechanismsDocument41 pagesChapter Two 2. Linkages Mechanismssamuel mechNo ratings yet
- AP Chapter 4Document56 pagesAP Chapter 4Esparza GeorgenNo ratings yet
- Manual For Compound Screw Jack-1Document4 pagesManual For Compound Screw Jack-1Yesupadam ValavalaNo ratings yet
- CV of Prof. Dr. Vijay KumarDocument31 pagesCV of Prof. Dr. Vijay KumarSudhanwa KulkarniNo ratings yet
- 6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionDocument2 pages6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionNita SebastianNo ratings yet
- Holy Spirit University of Kaslik: Course SyllabusDocument4 pagesHoly Spirit University of Kaslik: Course SyllabusElie OtayekNo ratings yet
- Trajectory Planning For Automatic Machines and RobotsDocument514 pagesTrajectory Planning For Automatic Machines and RobotsPromit ChoudhuryNo ratings yet
- 012-Transmissão 5r55e FordDocument2 pages012-Transmissão 5r55e FordCarlos NogueiraNo ratings yet
- The Analysis of R-S-S-R Spatial Four-Bar MechanismDocument56 pagesThe Analysis of R-S-S-R Spatial Four-Bar MechanismBenny SavioNo ratings yet
- Assignment 01 Rectillinear Motion AJN Sir-2921Document3 pagesAssignment 01 Rectillinear Motion AJN Sir-2921iitforumNo ratings yet
- Relative Acceleration (1) : From Relative Velocity Circular MotionDocument12 pagesRelative Acceleration (1) : From Relative Velocity Circular Motionkeremmerek1No ratings yet
- Theory of Machines References 1 MechanicDocument25 pagesTheory of Machines References 1 MechanicMd. Zillur RahmanNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Physics 201 Analytical Mechanics: J Kiefer May 2006Document61 pagesPhysics 201 Analytical Mechanics: J Kiefer May 2006Surya Anoraga J.YNo ratings yet
- Gears: Syed Shaheer Uddin Ahmed Lecturer, MPEDocument15 pagesGears: Syed Shaheer Uddin Ahmed Lecturer, MPEimranNo ratings yet