You might also like
- Usability Design for Location Based Mobile Services: in Wireless Metropolitan NetworksFrom EverandUsability Design for Location Based Mobile Services: in Wireless Metropolitan NetworksNo ratings yet
- Image-Based Indoor Localization Using Smartphone CameraDocument9 pagesImage-Based Indoor Localization Using Smartphone Cameratoufikenfissi1999No ratings yet
- Mobile AR 2Document11 pagesMobile AR 2Sara NamdarianNo ratings yet
- Indoor Positioning and Navigation System For Interior Design Augmented RealityDocument6 pagesIndoor Positioning and Navigation System For Interior Design Augmented Realityketu89No ratings yet
- Conference 12 OPTIM 2012Document6 pagesConference 12 OPTIM 2012Vlad PopescuNo ratings yet
- Semi-Supervised Variational Autoencoder For WiFi Indoor LocalizationDocument8 pagesSemi-Supervised Variational Autoencoder For WiFi Indoor Localizationissam sayyafNo ratings yet
- WIFI-Based Indoor Positioning SystemDocument3 pagesWIFI-Based Indoor Positioning SystemKitsayakorn Chantanasawee100% (1)
- Wide Area Localization and Tracking On Camera Phones For Mobile Augmented Reality SystemsDocument19 pagesWide Area Localization and Tracking On Camera Phones For Mobile Augmented Reality SystemsesrNo ratings yet
- Sensors: Beacons and BIM Models For Indoor Guidance and LocationDocument20 pagesSensors: Beacons and BIM Models For Indoor Guidance and LocationVictor DelegregoNo ratings yet
- Automatic Mapping of A Room Using LIDAR-Based Measuring SensorDocument7 pagesAutomatic Mapping of A Room Using LIDAR-Based Measuring Sensorajaykarthicsp.ece2020No ratings yet
- Golenbiewski 2020Document7 pagesGolenbiewski 2020cexopib409No ratings yet
- 1 s2.0 S1569190X22000430 MainDocument17 pages1 s2.0 S1569190X22000430 MainRaspberry PiNo ratings yet
- Bluetooth Positioning Using RSSI and Triangulation Methods: January 2013Document7 pagesBluetooth Positioning Using RSSI and Triangulation Methods: January 2013Aldo AriakusumahNo ratings yet
- RangaDocument5 pagesRangamanishNo ratings yet
- Singh 2018Document5 pagesSingh 2018cexopib409No ratings yet
- Building Change Detection From Lidar Point Cloud Data Based On Connected Component AnalysisDocument9 pagesBuilding Change Detection From Lidar Point Cloud Data Based On Connected Component AnalysisAYUSH KUMARNo ratings yet
- High-Accuracy Localization For Indoor Group Users Based On Extended Kalman FilterDocument11 pagesHigh-Accuracy Localization For Indoor Group Users Based On Extended Kalman Filteraseel jadallahNo ratings yet
- Improving Indoor Location Tracking Quality For Construction and Facility ManagementDocument8 pagesImproving Indoor Location Tracking Quality For Construction and Facility ManagementNixon CastlloNo ratings yet
- Calculating The Speed of Vehicles Using Wireless Sensor NetworksDocument5 pagesCalculating The Speed of Vehicles Using Wireless Sensor NetworksHayderNo ratings yet
- The Construction of An Indoor Floor Plan PDFDocument6 pagesThe Construction of An Indoor Floor Plan PDFtanzim ornabNo ratings yet
- Institute of Aeronautical Engineering: P2PMOBILE: A Framework For Remote Execution in Mobile EnvironmentDocument12 pagesInstitute of Aeronautical Engineering: P2PMOBILE: A Framework For Remote Execution in Mobile EnvironmentGibbs RodrixNo ratings yet
- Direct Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemDocument5 pagesDirect Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemFraj HarizNo ratings yet
- Prudtipongpun 2015Document6 pagesPrudtipongpun 2015latex3escribdNo ratings yet
- Sensors Self LocalisationDocument21 pagesSensors Self Localisationsivabharath44No ratings yet
- A Preliminary Study On The Design and Implementation of Satellite Remote Sensing Integrated Application Service PlatformDocument4 pagesA Preliminary Study On The Design and Implementation of Satellite Remote Sensing Integrated Application Service PlatformMohammed JunedNo ratings yet
- Dynamic Wifi-Based Indoor Positioning in 3D Virtual WorldDocument6 pagesDynamic Wifi-Based Indoor Positioning in 3D Virtual WorldShuichi IchikawaNo ratings yet
- A Survey On Efficient Mobile Cloud Computing Through Computational OffloadingDocument5 pagesA Survey On Efficient Mobile Cloud Computing Through Computational OffloadingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Irjmets Journal - AUGMENTED REALITY INDOOR NAVIGATION SYSTEMDocument6 pagesIrjmets Journal - AUGMENTED REALITY INDOOR NAVIGATION SYSTEMIRJMETS JOURNALNo ratings yet
- Hymotrack: A Mobile Ar Navigation System For Complex Indoor EnvironmentsDocument19 pagesHymotrack: A Mobile Ar Navigation System For Complex Indoor EnvironmentshenmusNo ratings yet
- An Algorithmto Count Nodesin Wireless Networks Usingtheir Actual PositionDocument11 pagesAn Algorithmto Count Nodesin Wireless Networks Usingtheir Actual Positionmanuel contrerasNo ratings yet
- On Indoor PositioningDocument4 pagesOn Indoor PositioningAshraf Sayed AbdouNo ratings yet
- A Genetic Based Indoor Positioning Algorithm Using Wi-Fi Received Signal Strength and Motion DataDocument19 pagesA Genetic Based Indoor Positioning Algorithm Using Wi-Fi Received Signal Strength and Motion DataIAES IJAINo ratings yet
- Real-Time 3D Indoor LocalizationDocument8 pagesReal-Time 3D Indoor LocalizationagarciaNo ratings yet
- Implementing Positioning Services Over An Ubiquitous InfrastructureDocument6 pagesImplementing Positioning Services Over An Ubiquitous Infrastructureramnag4No ratings yet
- Iot-Based Smart Parking For Smart CitiesDocument6 pagesIot-Based Smart Parking For Smart CitiesAtestate LiceuNo ratings yet
- BeeGOns A Wireless Sensor Node For Fog Computing in Smart City ApplicationsDocument5 pagesBeeGOns A Wireless Sensor Node For Fog Computing in Smart City Applicationsdominic savioNo ratings yet
- p297 TiemeniDocument7 pagesp297 TiemeniThabo MofokengNo ratings yet
- Indoor/Outdoor Management System Compliant With Google Maps and Android® OSDocument4 pagesIndoor/Outdoor Management System Compliant With Google Maps and Android® OSerpublicationNo ratings yet
- Delail 2013Document4 pagesDelail 2013Bunny GkNo ratings yet
- Icect 2009 152Document5 pagesIcect 2009 152Anish ShahNo ratings yet
- Design of A Mobile Augmented Reality-Based Indoor Navigation SystemDocument6 pagesDesign of A Mobile Augmented Reality-Based Indoor Navigation SystemAz sloveNo ratings yet
- Sensors: ARBIN: Augmented Reality Based Indoor Navigation SystemDocument20 pagesSensors: ARBIN: Augmented Reality Based Indoor Navigation SystemAz sloveNo ratings yet
- 54 - A Smartphone Indoor Localization Using Inertial Sensors and Single Wi-Fi Access PointDocument7 pages54 - A Smartphone Indoor Localization Using Inertial Sensors and Single Wi-Fi Access PointGauravNo ratings yet
- Research Paper 2Document9 pagesResearch Paper 2atikpNo ratings yet
- Smart Mirror-Digital Magazine For University Implemented Using Raspberry PiDocument4 pagesSmart Mirror-Digital Magazine For University Implemented Using Raspberry Pivishalmate10No ratings yet
- HiMLoc-Indoor Smartphone Localization Via Activity Aware Pedestrian Dead Reckoning With Selective Crowdsourced WiFi FingerprintingDocument10 pagesHiMLoc-Indoor Smartphone Localization Via Activity Aware Pedestrian Dead Reckoning With Selective Crowdsourced WiFi FingerprintingEduardo RojasNo ratings yet
- Tserpes2019 Article StrandScalableTrilaterationWitDocument16 pagesTserpes2019 Article StrandScalableTrilaterationWitAnthony WellsNo ratings yet
- Network Based Campus Navigation SystemDocument9 pagesNetwork Based Campus Navigation System19IT082 SANJAYKUMAR SNo ratings yet
- Deep Reinforcement Scheduling For Mobile Crowdsensing in Fog ComputingDocument18 pagesDeep Reinforcement Scheduling For Mobile Crowdsensing in Fog ComputingMinh Q. NguyenNo ratings yet
- Image Geo-Site Estimation Using Convolutional Auto-Encoder and Multi-Label Support Vector MachineDocument13 pagesImage Geo-Site Estimation Using Convolutional Auto-Encoder and Multi-Label Support Vector MachineNeerendra kumarNo ratings yet
- Computer Communications: Robson D.A. Timoteo, Daniel C. CunhaDocument10 pagesComputer Communications: Robson D.A. Timoteo, Daniel C. CunhaNguyễn Đình PhúcNo ratings yet
- 5 Equipments Used in The Field of Surveying: Dogma, Jan Katelyne P. 2019-02376 Engr. Irish PolingaDocument7 pages5 Equipments Used in The Field of Surveying: Dogma, Jan Katelyne P. 2019-02376 Engr. Irish PolingaJan Katelyne DogmaNo ratings yet
- The Origin and Trustworthiness of Data in Smart City ApplicationsDocument7 pagesThe Origin and Trustworthiness of Data in Smart City Applicationssrid1968No ratings yet
- A Framework For Automated Progress Monitoring Based On Hog Feature Recognition and High Resolution Remote Sensing ImageDocument24 pagesA Framework For Automated Progress Monitoring Based On Hog Feature Recognition and High Resolution Remote Sensing ImageAnonymous Gl4IRRjzNNo ratings yet
- FTTH Gis Ijeit1412201408 - 09Document9 pagesFTTH Gis Ijeit1412201408 - 09jorgefuriasseNo ratings yet
- Cost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresDocument19 pagesCost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresCESARNo ratings yet
- Simulation With AirMagnet Survey Using Heat Maps Inside Indoor Scenarios in Wireless Local Area NetworksDocument5 pagesSimulation With AirMagnet Survey Using Heat Maps Inside Indoor Scenarios in Wireless Local Area NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Improved Storage Model of Wireless Devices Using The CloudDocument12 pagesA New Improved Storage Model of Wireless Devices Using The CloudAIRCC - IJCNCNo ratings yet
- A Novel Light-Sensor-Based Information Transmission System For Outdoor Tracking Tothe Indoor Positioning SystemDocument7 pagesA Novel Light-Sensor-Based Information Transmission System For Outdoor Tracking Tothe Indoor Positioning SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Chandra 2011Document5 pagesChandra 2011Rakhan ZamanNo ratings yet
- Online - Accounting and Financial ManagementDocument2 pagesOnline - Accounting and Financial ManagementPranav KompallyNo ratings yet
- Circle and Conic SectionDocument49 pagesCircle and Conic SectionHimanshu GuptaNo ratings yet
- Design and Implementation of A Low Cost 3D Printed Humanoid Robotic PlatformDocument6 pagesDesign and Implementation of A Low Cost 3D Printed Humanoid Robotic PlatformPranav KompallyNo ratings yet
- Human Face Recognition Application Using PCA and Eigenface ApproachDocument5 pagesHuman Face Recognition Application Using PCA and Eigenface ApproachPranav KompallyNo ratings yet
- Common Factors of Commodity PricesDocument40 pagesCommon Factors of Commodity PricesPranav KompallyNo ratings yet
- Applications of DiodeDocument26 pagesApplications of DiodePranav KompallyNo ratings yet
- Red Hat FinalDocument16 pagesRed Hat Finalapi-664453460No ratings yet
- Topic04 - Recovering Graphics FileDocument44 pagesTopic04 - Recovering Graphics FileHappy Plants BDNo ratings yet
- Pubg - Freefire (Swapon Vai)Document3 pagesPubg - Freefire (Swapon Vai)Shafiqul Islam Sajib100% (1)
- JSW Casting EquipDocument23 pagesJSW Casting EquipArnab GhoshNo ratings yet
- Aircon Heat Load Calculation Sheet: Project Name: GO TAN HIEP Address: Bien Hoa Dong NaiDocument6 pagesAircon Heat Load Calculation Sheet: Project Name: GO TAN HIEP Address: Bien Hoa Dong NaiNGUYEN THANH LUANNo ratings yet
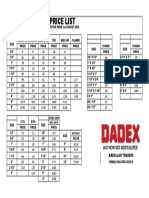
- Dadex Efast Price List 1ST August 2020Document1 pageDadex Efast Price List 1ST August 2020Jugno ShahNo ratings yet
- BLDC MotorDocument4 pagesBLDC MotorMrudulaNo ratings yet
- Canon Pixma IP3000 Part ListDocument22 pagesCanon Pixma IP3000 Part ListlftrevNo ratings yet
- N Is The Smallest Positive Integer That Has 7 Factors. Quantity ADocument10 pagesN Is The Smallest Positive Integer That Has 7 Factors. Quantity ATeja SreeNo ratings yet
- Vermeer D7x11 SERIES II NavigatorDocument694 pagesVermeer D7x11 SERIES II NavigatorAbraham JohnsonNo ratings yet
- KX-TGDA20: Additional Digital Cordless HandsetDocument16 pagesKX-TGDA20: Additional Digital Cordless HandsetBrando GarciaNo ratings yet
- 47Lm7600 Interconnect Diagram: P702 N/C Backlight B+ 60V LD701 ErrorDocument1 page47Lm7600 Interconnect Diagram: P702 N/C Backlight B+ 60V LD701 Errorruben mapaloNo ratings yet
- Object-Oriented Programming in BulgarianDocument14 pagesObject-Oriented Programming in BulgarianGILDA GODEANUNo ratings yet
- Data Interpretation PO Mains PDF Set 11Document42 pagesData Interpretation PO Mains PDF Set 11Nisha PariharNo ratings yet
- Solar System CGRDocument8 pagesSolar System CGRjunaid100% (2)
- Quantus Fluorometer Operating Manual TM396Document17 pagesQuantus Fluorometer Operating Manual TM396Anggi ManurungNo ratings yet
- STAT 3008 Applied Regression Analysis Tutorial 1 - Term 2, 2019 20Document2 pagesSTAT 3008 Applied Regression Analysis Tutorial 1 - Term 2, 2019 20MingyanNo ratings yet
- Aplikasi Alat Ukur Indeks Massa Tubuh Untuk Evaluasi Gizi Balita Berbasis AndroidDocument5 pagesAplikasi Alat Ukur Indeks Massa Tubuh Untuk Evaluasi Gizi Balita Berbasis Androidsri lestariNo ratings yet
- EV Form-SchwabDocument12 pagesEV Form-SchwabShashikant ThakreNo ratings yet
- DC Que BankDocument11 pagesDC Que BankGaurav Kumbharde0% (1)
- ASTM C806-12 Restrained Expansion of Expansive Cement MortarDocument4 pagesASTM C806-12 Restrained Expansion of Expansive Cement MortarAlonso SojoNo ratings yet
- Data Sheet For Three-Phase Squirrel-Cage-Motors SIMOTICS: Motor Type: 7CV3314B Simotics SD - 315L - Im B3 - 4 PDocument1 pageData Sheet For Three-Phase Squirrel-Cage-Motors SIMOTICS: Motor Type: 7CV3314B Simotics SD - 315L - Im B3 - 4 PHEMANT RAMJINo ratings yet
- Skripsi IntiDocument153 pagesSkripsi IntiRIZKY FADILAHNo ratings yet
- Intro To Software Quality AssuranceDocument30 pagesIntro To Software Quality AssuranceMarneil Allen SanchezNo ratings yet
- Gad Microproject (02,14,18) SYCM2 - GAD MicroprojectDocument31 pagesGad Microproject (02,14,18) SYCM2 - GAD MicroprojectAtharva BhosaleNo ratings yet
- Guidelines of PBL - MBA (22-24) Sem IIDocument8 pagesGuidelines of PBL - MBA (22-24) Sem IIShivnath KarmakarNo ratings yet
- Adams Herb Chassis EngineeringDocument142 pagesAdams Herb Chassis EngineeringTapare Ankush90% (39)
- Rolleri Catalogue 2016 INT PDFDocument292 pagesRolleri Catalogue 2016 INT PDFAdrian Vargas SanchezNo ratings yet
- Evolving Business Models of Online Food Delivery Industry in Indian ContextDocument8 pagesEvolving Business Models of Online Food Delivery Industry in Indian ContextDeepak TyagiNo ratings yet
- SMF&W 851-01-07 Manual Arc Welding 220319Document9 pagesSMF&W 851-01-07 Manual Arc Welding 220319Shahid RazaNo ratings yet