You might also like
- 3-Instruction Set of 8086 MicroprocessorDocument35 pages3-Instruction Set of 8086 Microprocessorafzal_a50% (2)
- 8086 Opcode CalculationDocument2 pages8086 Opcode CalculationSanthanamari GNo ratings yet
- MPMC Ii-Unit: Instruction Formats of 8086Document12 pagesMPMC Ii-Unit: Instruction Formats of 8086LAVANYA MNo ratings yet
- Bommireddy Rambabu: MPMC Ii-UnitDocument12 pagesBommireddy Rambabu: MPMC Ii-UnitrambabuNo ratings yet
- 8086 Instruction FormatsDocument5 pages8086 Instruction FormatsSuchi UshaNo ratings yet
- Chapter FourDocument13 pagesChapter FourRoza MulukenNo ratings yet
- Instruction-Format 8086Document47 pagesInstruction-Format 8086istegd2610No ratings yet
- Unit 3 Lecturer NotesDocument48 pagesUnit 3 Lecturer NotessureshgurujiNo ratings yet
- Interrupts: - Figure Shows A Time Line That Indicates A Typist TypingDocument33 pagesInterrupts: - Figure Shows A Time Line That Indicates A Typist TypingVuggam VenkateshNo ratings yet
- Instruction FormatDocument10 pagesInstruction Formatmrpython456No ratings yet
- Cse 216 - L7Document7 pagesCse 216 - L7Hasin EshrakNo ratings yet
- Unit 3 Students NotesDocument18 pagesUnit 3 Students NotessureshgurujiNo ratings yet
- Instruction Formats in 8086Document5 pagesInstruction Formats in 8086siitcentre100% (4)
- Module 11 Lecture4Document15 pagesModule 11 Lecture4p10co986No ratings yet
- 80x85 FormatDocument17 pages80x85 Formatnorberto_1No ratings yet
- Instruction Templates of Microprocessor 8086Document5 pagesInstruction Templates of Microprocessor 8086Tafzeel Mohammad100% (3)
- Summary of The Addressing ModesDocument7 pagesSummary of The Addressing Modesbaseer khanNo ratings yet
- MP - Unit 2Document38 pagesMP - Unit 2Gurinder Singh GirnNo ratings yet
- Machine Language ExamplesDocument5 pagesMachine Language ExamplesWaqas KhanNo ratings yet
- 8086 Programming: Compiled By: Chandra Thapa October 23, 2012Document76 pages8086 Programming: Compiled By: Chandra Thapa October 23, 2012gideontargrave7No ratings yet
- Asm07 MachineLanguageDocument6 pagesAsm07 MachineLanguageselva247No ratings yet
- FMPM Module 2Document64 pagesFMPM Module 2riddheshsawntNo ratings yet
- Midterm 1 SolutionDocument6 pagesMidterm 1 SolutionsagarNo ratings yet
- 8086 Addressing Modes and Instruction FormatsDocument22 pages8086 Addressing Modes and Instruction FormatsJOFRE GONENo ratings yet
- Instruction Set of 8086Document53 pagesInstruction Set of 8086ddeepak82956No ratings yet
- Cardinal Processor ISADocument26 pagesCardinal Processor ISAelectronics enthusiast pradeepNo ratings yet
- Addressing Modes of 8086 MicroprocessorDocument3 pagesAddressing Modes of 8086 MicroprocessorYogesh KuteNo ratings yet
- Examples of Machine Language Instruction SetDocument10 pagesExamples of Machine Language Instruction Setعبدالرحيم اودينNo ratings yet
- F2010 552 Project DescriptionDocument6 pagesF2010 552 Project DescriptionJamil_fawadNo ratings yet
- The Memory Management Real Mode: Lecture Note 5Document9 pagesThe Memory Management Real Mode: Lecture Note 5Gunjan VermaNo ratings yet
- Intel 8086 Addressing Modes and Instruction EncodingDocument36 pagesIntel 8086 Addressing Modes and Instruction EncodingmunkhuuNo ratings yet
- Byte 7 6 5 4 3 2 1 0 1 Opcode D W 2 Reg R/M 3 (Optional) 4 (Optional) 5 (Optional) 6 (Optional)Document8 pagesByte 7 6 5 4 3 2 1 0 1 Opcode D W 2 Reg R/M 3 (Optional) 4 (Optional) 5 (Optional) 6 (Optional)Mohamed HegazyNo ratings yet
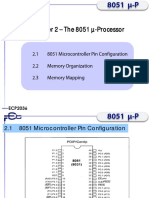
- Chapter 2 - The 8051 Microcontroller (Students)Document44 pagesChapter 2 - The 8051 Microcontroller (Students)Norsyazwani Abdul RashidNo ratings yet
- Functions of Combinational Logic DecodersDocument46 pagesFunctions of Combinational Logic DecodersIsrael EliasNo ratings yet
- Addressing Modes I: - The MFC5270 Registers Have 32 Bits - The Data Bus Is 32 Bits Wide - Instructions Can Operate OnDocument24 pagesAddressing Modes I: - The MFC5270 Registers Have 32 Bits - The Data Bus Is 32 Bits Wide - Instructions Can Operate OnMoe M.DiraaNo ratings yet
- Instruction Format: Converting Assembly Language Instructions To Machine Code in 8086 MicroprocessorDocument5 pagesInstruction Format: Converting Assembly Language Instructions To Machine Code in 8086 Microprocessorwaheed azizNo ratings yet
- ARM Prog Model 2 AddressingDocument28 pagesARM Prog Model 2 AddressingSachin RajputNo ratings yet
- 8051 Programming PDFDocument74 pages8051 Programming PDFGaurav kumarNo ratings yet
- Instruction SetDocument104 pagesInstruction SetKrishnaveni DhulipalaNo ratings yet
- Assembler Dependent FeaturesDocument25 pagesAssembler Dependent FeaturesManasa100% (2)
- Open Core SpiDocument13 pagesOpen Core SpiBhanu Pratap Singh100% (1)
- Lab 6 - SSDDocument8 pagesLab 6 - SSDZunair NazirNo ratings yet
- Assignment - Fall 2023Document4 pagesAssignment - Fall 2023Areesha FerozNo ratings yet
- Sample Exam QuestionsDocument9 pagesSample Exam Questionssomeguyinoz100% (1)
- w1 01 Data Com ConceptsDocument14 pagesw1 01 Data Com Conceptsapi-26084493No ratings yet
- MIPS Instruction Coding With HexDocument4 pagesMIPS Instruction Coding With HexMichael van der WerveNo ratings yet
- Cj2m-Cpu3-Cpu1 E1 DSDocument4 pagesCj2m-Cpu3-Cpu1 E1 DSluis miguel huarita castellonNo ratings yet
- 16 32 r0 RTN Program Counter or PC: CPE 221 Test 1 Solution Spring 2019Document4 pages16 32 r0 RTN Program Counter or PC: CPE 221 Test 1 Solution Spring 2019Kyra LathonNo ratings yet
- Set 2Document45 pagesSet 2Said TouhamiNo ratings yet
- 3 MPDocument19 pages3 MPsnNo ratings yet
- Intel 8086 Instruction Format: Electrical and Electronic EngineeringDocument4 pagesIntel 8086 Instruction Format: Electrical and Electronic EngineeringWanjira KigokoNo ratings yet
- Modbus RTU Made Simple With Detailed Descriptions and ExamplesDocument11 pagesModbus RTU Made Simple With Detailed Descriptions and ExamplesJack OwenNo ratings yet
- Chapter Five: Memory InterfacingDocument15 pagesChapter Five: Memory Interfacingoumer beshirNo ratings yet
- Unit 3Document14 pagesUnit 3Riza Pahama MananaongNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Unit-Ii - Instruction FormatsDocument8 pagesUnit-Ii - Instruction FormatsKunte Vikas RaoNo ratings yet
- WWW - Manaresults.Co - In: Power System AnalysisDocument8 pagesWWW - Manaresults.Co - In: Power System AnalysisAlukoNo ratings yet
- Psa - 2 Units 201-20-Important Questions 1Document3 pagesPsa - 2 Units 201-20-Important Questions 1Kunte Vikas Rao0% (1)
- Psa - 2 Units 201-20-Important Questions 1Document3 pagesPsa - 2 Units 201-20-Important Questions 1Kunte Vikas Rao0% (1)
- WWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Document2 pagesWWW - Manaresults.Co - In: B.Tech III Year II Semester (R13) Supplementary Examinations December 2016Kunte Vikas RaoNo ratings yet
- Management Science Unit-IDocument19 pagesManagement Science Unit-IKunte Vikas RaoNo ratings yet
- EMF Book - What You Should Know About Electromagnetic Fields, Electromagnetic Radiation & Your Health PDFDocument199 pagesEMF Book - What You Should Know About Electromagnetic Fields, Electromagnetic Radiation & Your Health PDFKunte Vikas RaoNo ratings yet
- Ee2402 PSG 2 MarksDocument16 pagesEe2402 PSG 2 MarksgokulchandruNo ratings yet
- Effects of Voltage Frequency Variations Induction MotorsDocument2 pagesEffects of Voltage Frequency Variations Induction MotorsKaran Thapar100% (1)
- Mba ApttestDocument7 pagesMba ApttestKunte Vikas RaoNo ratings yet
- KPR Institute of Engineering and Technology: COIMBATORE - 641 407Document56 pagesKPR Institute of Engineering and Technology: COIMBATORE - 641 407Karthic SundaramNo ratings yet
- D80153GC20 AgDocument214 pagesD80153GC20 AgĐoàn Tiến DũngNo ratings yet
- Introduction to Java programming conceptsDocument29 pagesIntroduction to Java programming conceptsAnuj NagpalNo ratings yet
- NicoNaumann RTE VFBDocument19 pagesNicoNaumann RTE VFBRahul WaliNo ratings yet
- CS1202 Fundamentals of Computing Question BankDocument32 pagesCS1202 Fundamentals of Computing Question BankHemanand DuraiveluNo ratings yet
- 06-How To Use Java's Functional Consumer Interface ExampleDocument2 pages06-How To Use Java's Functional Consumer Interface ExampleRoberto AlonsoNo ratings yet
- Object Oriented Programming InharitanceDocument25 pagesObject Oriented Programming InharitanceSulaman SadiqNo ratings yet
- C++ program calculates employee pay based on hours workedDocument3 pagesC++ program calculates employee pay based on hours workedtaani_annNo ratings yet
- The Best Project Management Software - 1ViewTaskDocument7 pagesThe Best Project Management Software - 1ViewTask1viewtaskNo ratings yet
- SQL Injection and Password Cracking GuideDocument5 pagesSQL Injection and Password Cracking GuideAfrah HassanNo ratings yet
- Drupal 8 User GuideDocument224 pagesDrupal 8 User Guideibrail5No ratings yet
- UIVA DocumentationDocument5 pagesUIVA DocumentationaldreneideNo ratings yet
- Ooad Unit IDocument37 pagesOoad Unit IGeetha ReddyNo ratings yet
- CakeShop MockDocument4 pagesCakeShop MockSwethaNo ratings yet
- The Dakaz Computer Studies 12Document47 pagesThe Dakaz Computer Studies 12Musenge LuwishaNo ratings yet
- C++ SolutionsDocument30 pagesC++ SolutionsRodney LucasNo ratings yet
- 13 Requirements Traceability MatrixDocument4 pages13 Requirements Traceability MatrixShikha KambojNo ratings yet
- Ooj Notes 8Document38 pagesOoj Notes 8Aditya B NNo ratings yet
- GG Java v3Document46 pagesGG Java v3metallic1No ratings yet
- Web Services BookDocument2 pagesWeb Services BookRamasamy ManthiramoorthyNo ratings yet
- MONARC-trainingDocument31 pagesMONARC-trainingBoutique des PrincessesNo ratings yet
- SQEDocument17 pagesSQEMurad AliNo ratings yet
- Spatial pub-sub architecture proposal for distributed systemsDocument9 pagesSpatial pub-sub architecture proposal for distributed systemsOpeolu VictoryNo ratings yet
- Javascript & DomDocument9 pagesJavascript & DomAndrei UrsuleanuNo ratings yet
- LOAD TESTING - AdhamSedhDocument19 pagesLOAD TESTING - AdhamSedhAbrar MohammadNo ratings yet
- Birla Institute of Technology and Science, Pilani CS F212 Database Systems Lab No # 2Document12 pagesBirla Institute of Technology and Science, Pilani CS F212 Database Systems Lab No # 2ADARSH RANJAN YADAVNo ratings yet
- Unit 20 AssignmentDocument10 pagesUnit 20 Assignmentmueez hassanNo ratings yet
- C++ - Installing Python Module - SpiDev - Stack OverflowDocument3 pagesC++ - Installing Python Module - SpiDev - Stack Overflowronald decimus MAD-BONDONo ratings yet
- An Opencl Implementation of The Gaussian Pyramid and The ResamplerDocument29 pagesAn Opencl Implementation of The Gaussian Pyramid and The ResamplerjjomierNo ratings yet
- Android XML Attributes and Styles ReferenceDocument4 pagesAndroid XML Attributes and Styles ReferenceOctaZone StudioNo ratings yet