You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual To Use The Plate Bending Matlab CodeDocument1 pageManual To Use The Plate Bending Matlab Codedev burmanNo ratings yet
- Transfinite InterpolationDocument5 pagesTransfinite Interpolationdev burmanNo ratings yet
- RC Plane DesignDocument5 pagesRC Plane Designdev burmanNo ratings yet
- Subsidiary Expansion ContractionDocument17 pagesSubsidiary Expansion Contractiondev burmanNo ratings yet
- Answer All QuestionsDocument1 pageAnswer All Questionsdev burmanNo ratings yet
- Hypersonic Term PaperDocument34 pagesHypersonic Term Paperdev burmanNo ratings yet
- FE 2019 Quiz1 Solution PDFDocument4 pagesFE 2019 Quiz1 Solution PDFdev burmanNo ratings yet
- Definition of Stroke SLIDESDocument122 pagesDefinition of Stroke SLIDESdev burmanNo ratings yet
- Optimization of Geodetic DesignDocument9 pagesOptimization of Geodetic Designdev burmanNo ratings yet
- Detecting COVID-19 in X-Ray Images With Deep Learning: Dev Burman July 2020Document5 pagesDetecting COVID-19 in X-Ray Images With Deep Learning: Dev Burman July 2020dev burmanNo ratings yet
- NSDE Assignment 5Document2 pagesNSDE Assignment 5dev burmanNo ratings yet
- Answer All QuestionsDocument1 pageAnswer All Questionsdev burmanNo ratings yet
- Comparison of Counter-Rotating and Traditional AxiDocument13 pagesComparison of Counter-Rotating and Traditional Axidev burmanNo ratings yet
- CPJEEnd Sem QSTN Paper 2016Document2 pagesCPJEEnd Sem QSTN Paper 2016dev burmanNo ratings yet
- New York City Employment Trends: The Two Largest and Longest NYC Job ExpansionsDocument4 pagesNew York City Employment Trends: The Two Largest and Longest NYC Job Expansionsdev burmanNo ratings yet
- Aspirated Compressors: J. L. Kerrebrock, D. P. Reijnen, W. S. Ziminsky, L M. SmilgDocument12 pagesAspirated Compressors: J. L. Kerrebrock, D. P. Reijnen, W. S. Ziminsky, L M. Smilgdev burmanNo ratings yet
- Design Criteria For NozzleDocument11 pagesDesign Criteria For NozzleP KNo ratings yet
- Aula3 - 3 - Gasturb Off-Design and Sizing - Ver2Document59 pagesAula3 - 3 - Gasturb Off-Design and Sizing - Ver2dev burmanNo ratings yet
- IMP Thesis 1Document179 pagesIMP Thesis 1dev burmanNo ratings yet
- Manual To Use The Topology Optimization Matlab CodeDocument2 pagesManual To Use The Topology Optimization Matlab Codedev burmanNo ratings yet
- Preliminary Design of A Transonic Fan For Low By-Pass Turbofan EngineDocument15 pagesPreliminary Design of A Transonic Fan For Low By-Pass Turbofan Enginedev burmanNo ratings yet
- Aim of The ExperimentDocument2 pagesAim of The Experimentdev burmanNo ratings yet
- Excel As A Modelling Platform For Thermo PDFDocument7 pagesExcel As A Modelling Platform For Thermo PDFdev burmanNo ratings yet
- Aspirated Compressor ThesisDocument157 pagesAspirated Compressor Thesisdev burmanNo ratings yet
- Porsche Aircraft Engine P F M 3200: Theengineering Resourcefor Advancing MobilityDocument16 pagesPorsche Aircraft Engine P F M 3200: Theengineering Resourcefor Advancing Mobilitydev burmanNo ratings yet
- Assignment 2: Submitted byDocument7 pagesAssignment 2: Submitted bydev burmanNo ratings yet
- Assignment 4 - Report: Graph For Train and Test Error Vs No of EpochsDocument2 pagesAssignment 4 - Report: Graph For Train and Test Error Vs No of Epochsdev burmanNo ratings yet
- Experiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveDocument6 pagesExperiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveMd SayemNo ratings yet
- 3600-2009 (A1)Document11 pages3600-2009 (A1)RekhaRaju0% (1)
- Fluid Mechanics (6Th Ed.), Frank M. White, Mcgraw Hill, 2007Document4 pagesFluid Mechanics (6Th Ed.), Frank M. White, Mcgraw Hill, 2007cartoon_nate100% (1)
- PROPPA Promo WebDocument2 pagesPROPPA Promo WebSamir DamaniNo ratings yet
- Design of Machinery: Assignment Gear TrainsDocument15 pagesDesign of Machinery: Assignment Gear Trainshasan bishNo ratings yet
- Centrifugal Fans With Backward-Curved and Forward-Curved BladesDocument8 pagesCentrifugal Fans With Backward-Curved and Forward-Curved BladesjcbobedaNo ratings yet
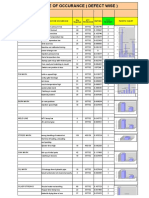
- Defect Name Cause For Occurance Rating Pareto Chart Qty Rejected Qty. Produced OCC RankingDocument4 pagesDefect Name Cause For Occurance Rating Pareto Chart Qty Rejected Qty. Produced OCC RankingRavi YadavNo ratings yet
- ETABS Concrete Frame Design: ACI 318-08 Beam Section DesignDocument7 pagesETABS Concrete Frame Design: ACI 318-08 Beam Section DesignMuhammad Arif RachmanNo ratings yet
- Eatonroadranger RTXF-13710BDocument38 pagesEatonroadranger RTXF-13710Bмакс игнатовNo ratings yet
- Mitubishi AJX PDFDocument20 pagesMitubishi AJX PDFZeljko StamatovicNo ratings yet
- Lorentz Ps2 600 Cs FDocument6 pagesLorentz Ps2 600 Cs FSINES FranceNo ratings yet
- 18 BrakingDocument50 pages18 BrakingMuvinda JayasingheNo ratings yet
- Nashreyat Latin2Document79 pagesNashreyat Latin2Diego Fernando AVENDA¥O RODRIGUEZNo ratings yet
- PDS01.01.002-A - Wouter Witzel - EVS InstallationDocument1 pagePDS01.01.002-A - Wouter Witzel - EVS InstallationVilius BukysNo ratings yet
- BS en 12390-13-2021Document18 pagesBS en 12390-13-2021Sergio VianaNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument51 pagesChapter 16 Planar Kinematics of Rigid BodyDawood AbdullahNo ratings yet
- Manual Af-900 EngDocument32 pagesManual Af-900 EngDennis Guajardo LaraNo ratings yet
- R. D. S. O.: Rdso/b - 10408/8Document1 pageR. D. S. O.: Rdso/b - 10408/8MUTHU PANDINo ratings yet
- Terex Genie RL4000 Operation Manual D1 PDFDocument60 pagesTerex Genie RL4000 Operation Manual D1 PDFjmbc_jbcNo ratings yet
- Diagnostic Trouble Code Climatronic Notes PDFDocument4 pagesDiagnostic Trouble Code Climatronic Notes PDFpuncimanNo ratings yet
- Compressibility Factor Z CalcDocument3 pagesCompressibility Factor Z CalcSrihari KodimelaNo ratings yet
- Randolph PoulosDocument17 pagesRandolph PoulostarekeeeNo ratings yet
- Experimental Investigation On Solar Absorption Refrigeration System in Malaysia PDFDocument5 pagesExperimental Investigation On Solar Absorption Refrigeration System in Malaysia PDFRana Abdul RehmanNo ratings yet
- Learning Activity Sheets Science: Q3 - Week 1-2Document9 pagesLearning Activity Sheets Science: Q3 - Week 1-2Ařčhäńgël Käśtïel100% (1)
- 18 Mas4000tecDocument12 pages18 Mas4000tecSimamora Samuel HansenNo ratings yet
- Ashirvad CPVC - Price List - 1st March 2021Document14 pagesAshirvad CPVC - Price List - 1st March 2021Ujwal Elijah GurramNo ratings yet
- 105 Sorbothane FAQsDocument2 pages105 Sorbothane FAQsMarcNo ratings yet
- WO - No Valve Type Size X Class Item Name MaterialDocument24 pagesWO - No Valve Type Size X Class Item Name MaterialAliasgarNo ratings yet
- Butech Hydrogen Valves, Fittings & Tubing NEEDLEDocument8 pagesButech Hydrogen Valves, Fittings & Tubing NEEDLEBodega 3001No ratings yet
- Boiler Operation ManualDocument69 pagesBoiler Operation ManualAnton Hidayat100% (1)