You might also like
- Ras PiDocument4 pagesRas PiAreeb AhmadNo ratings yet
- Embedded System Lab IiDocument28 pagesEmbedded System Lab IiRangaraj A.GNo ratings yet
- Iot External FinalDocument24 pagesIot External FinalAbdul MuqtadirNo ratings yet
- NavDocument2 pagesNavBANUNG ROSETNo ratings yet
- Capteur Ultra SonDocument2 pagesCapteur Ultra Sonecherqaoui belgasemNo ratings yet
- IoT All CodesDocument22 pagesIoT All Codespatas54810No ratings yet
- CodeDocument6 pagesCodejustforbookNo ratings yet
- Data Communication and Computer Network ITE3001 (L15+16) : Digital Assignment - 2Document18 pagesData Communication and Computer Network ITE3001 (L15+16) : Digital Assignment - 2Adarsh singhNo ratings yet
- LAC12Document12 pagesLAC12Rowin MarquezNo ratings yet
- Controls Reviewer 1Document6 pagesControls Reviewer 1John Mer ValdezNo ratings yet
- IoT All CodesDocument22 pagesIoT All Codespatas54810No ratings yet
- YoloDocument17 pagesYoloShubhangi OjhaNo ratings yet
- Daalab 22BLC1039Document22 pagesDaalab 22BLC1039dpsvn.gaur12217No ratings yet
- Push Button PDFDocument2 pagesPush Button PDFAhmad KikiNo ratings yet
- Daa LabDocument30 pagesDaa LabNikhil GautamNo ratings yet
- KTMT Bài 6Document5 pagesKTMT Bài 6lcongmanh1511611No ratings yet
- UntitledDocument6 pagesUntitledMark christian LacapNo ratings yet
- โค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างDocument4 pagesโค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างธวัชชัย ตรีศูนย์No ratings yet
- CN Experiment 1,2,3Document7 pagesCN Experiment 1,2,3Krishna NithariyaNo ratings yet
- MicroDocument11 pagesMicroHamza SamadNo ratings yet
- AYush DAA LABDocument30 pagesAYush DAA LABabyefinalhaiNo ratings yet
- UntitledDocument16 pagesUntitledMark christian LacapNo ratings yet
- Shock Sensor PDFDocument2 pagesShock Sensor PDFAhmad KikiNo ratings yet
- Daa PDFDocument16 pagesDaa PDFशोभित चौरसियाNo ratings yet
- NTC FileDocument63 pagesNTC FilebbbbbbbNo ratings yet
- Final ProgramDocument10 pagesFinal Programkarthiha megavarnamNo ratings yet
- Answer Keys To B65LDocument20 pagesAnswer Keys To B65LhimanshuviswasNo ratings yet
- Os TaskDocument11 pagesOs TaskNikhita EvuriNo ratings yet
- Cấu trúcDocument15 pagesCấu trúcHung BuiNo ratings yet
- Lab Manual: Riphah International UniversityDocument40 pagesLab Manual: Riphah International UniversityMoon MughalNo ratings yet
- DS Assignment FinalDocument35 pagesDS Assignment FinalChetan ArkadeNo ratings yet
- Dolores Sanchez AutomatedrobotDocument4 pagesDolores Sanchez Automatedrobotapi-248437787No ratings yet
- ทดสอบDocument5 pagesทดสอบธวัชชัย ตรีศูนย์No ratings yet
- It Major 3 Mid ExamDocument26 pagesIt Major 3 Mid Examcrisanto porniaNo ratings yet
- Analisa Program Detector TeganganDocument8 pagesAnalisa Program Detector Teganganblimbing rotor1No ratings yet
- Lac 11Document31 pagesLac 11Barro, Romeo Franco P.No ratings yet
- MCSL-054 (II) Solved AssignmentDocument11 pagesMCSL-054 (II) Solved AssignmentRajni KumariNo ratings yet
- C, C++ Lab PracticalDocument27 pagesC, C++ Lab Practicalsantanu mahalaNo ratings yet
- Python Oops FunctionDocument14 pagesPython Oops FunctionPratik Kumar JhaNo ratings yet
- Nancy Week1Document34 pagesNancy Week1Vansh GuptaNo ratings yet
- Tayyab Khan DSA Lab Report 1Document13 pagesTayyab Khan DSA Lab Report 1cigila6437No ratings yet
- Lingaya's Vidyapeeth, Faridabad: Lab ManualDocument32 pagesLingaya's Vidyapeeth, Faridabad: Lab ManualEntertainment KingNo ratings yet
- Computer NetworksDocument20 pagesComputer NetworksVijay PohwaniNo ratings yet
- MileStone-2 Exam Question Answer (Maybe)Document18 pagesMileStone-2 Exam Question Answer (Maybe)Debasis DuttaNo ratings yet
- CN Lab ManualDocument37 pagesCN Lab ManualVishal MishraNo ratings yet
- DCDR FULLDocument23 pagesDCDR FULLhet shah100% (1)
- Name: Mohammad Modi Reg No: 19BCE2215 Course Network and Communication Lab Fat 1Document10 pagesName: Mohammad Modi Reg No: 19BCE2215 Course Network and Communication Lab Fat 1mohammed modiNo ratings yet
- Code Dieu KhienDocument8 pagesCode Dieu KhienHau VoNo ratings yet
- 16A Operator Overloading-All ProgramsDocument3 pages16A Operator Overloading-All ProgramsdarshanNo ratings yet
- ความเร็วทดลองDocument4 pagesความเร็วทดลองธวัชชัย ตรีศูนย์No ratings yet
- C Code To Implement RSA AlgorithmDocument13 pagesC Code To Implement RSA AlgorithmharineeNo ratings yet
- Lab 1Document22 pagesLab 1dpsvn.gaur12217No ratings yet
- Tic Tac ToeDocument22 pagesTic Tac ToeDileep KrNo ratings yet
- Note On UMLDocument69 pagesNote On UMLArnab ChakrabortyNo ratings yet
- LED ProgramDocument12 pagesLED ProgramAkshata UnkalNo ratings yet
- Code Robot Hut Bui ArduinoDocument14 pagesCode Robot Hut Bui Arduinotrung phamNo ratings yet
- Schleifen Code Mit DisplayDocument3 pagesSchleifen Code Mit DisplayMarco989898PlaysNo ratings yet
- Assignment No.1: //WAP To Simulate The Functionality of Lamport's Logical ClockDocument46 pagesAssignment No.1: //WAP To Simulate The Functionality of Lamport's Logical ClockHimal BhandariNo ratings yet
- Implement On A Data Set of Characters The Three CRC PolynomialsDocument26 pagesImplement On A Data Set of Characters The Three CRC PolynomialsSlim ShadyNo ratings yet
- Regula FalsiDocument1 pageRegula FalsiAreeb AhmadNo ratings yet
- Ension Embers: Chinmoy KolayDocument28 pagesEnsion Embers: Chinmoy KolayAreeb AhmadNo ratings yet
- Group List Ce341aDocument6 pagesGroup List Ce341aAreeb AhmadNo ratings yet
- Ch1 1 (Notes) PDFDocument12 pagesCh1 1 (Notes) PDFAreeb AhmadNo ratings yet
- Ntroduction Esign Hilosophy: Chinmoy KolayDocument32 pagesNtroduction Esign Hilosophy: Chinmoy KolayAreeb AhmadNo ratings yet
- Group List Ce341aDocument6 pagesGroup List Ce341aAreeb AhmadNo ratings yet
- In The Footsteps of The ProphetDocument256 pagesIn The Footsteps of The Prophetmdsartaj7428100% (2)
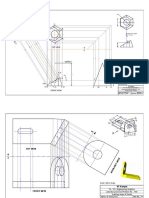
- Normal View of Inclined Surface: H F Top ViewDocument3 pagesNormal View of Inclined Surface: H F Top ViewAreeb AhmadNo ratings yet
- This Is A Dynamic List. It Will Get Updated As and When Departments Propose Changes.)Document54 pagesThis Is A Dynamic List. It Will Get Updated As and When Departments Propose Changes.)Areeb AhmadNo ratings yet
- Homework #1:: Knowing Steel Structures: Loading and Load PathDocument1 pageHomework #1:: Knowing Steel Structures: Loading and Load PathAreeb AhmadNo ratings yet
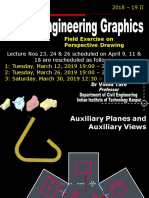
- Announcement: Field Exercise On Perspective DrawingDocument26 pagesAnnouncement: Field Exercise On Perspective DrawingAreeb AhmadNo ratings yet
- Ntroduction Esign Hilosophy: Chinmoy KolayDocument32 pagesNtroduction Esign Hilosophy: Chinmoy KolayAreeb AhmadNo ratings yet
- 10 X' B G, A B D: Scale: Not To ScaleDocument4 pages10 X' B G, A B D: Scale: Not To ScaleAreeb AhmadNo ratings yet
- Normal View of Inclined Surface: H F Top ViewDocument3 pagesNormal View of Inclined Surface: H F Top ViewAreeb AhmadNo ratings yet
- Announcement: Field Exercise On Perspective DrawingDocument10 pagesAnnouncement: Field Exercise On Perspective DrawingAreeb AhmadNo ratings yet
- NPTEL Concrete Engg and Tech Problem and Solved AnswersDocument5 pagesNPTEL Concrete Engg and Tech Problem and Solved AnswerssuranjanacNo ratings yet
- List of Courses Proposed To Be Offered in Summer Term 2019Document4 pagesList of Courses Proposed To Be Offered in Summer Term 2019Areeb AhmadNo ratings yet
- CE272ADocument41 pagesCE272AAreeb AhmadNo ratings yet
- NPTEL Concrete Engg and Tech Problem and Solved AnswersDocument5 pagesNPTEL Concrete Engg and Tech Problem and Solved AnswerssuranjanacNo ratings yet
- Lecture 3Document23 pagesLecture 3Areeb AhmadNo ratings yet
- Pololu AVR Library Command ReferenceDocument52 pagesPololu AVR Library Command ReferenceAreeb AhmadNo ratings yet
- NODEMCUDocument10 pagesNODEMCUAreeb AhmadNo ratings yet
- Hso 201 PDFDocument7 pagesHso 201 PDFAreeb AhmadNo ratings yet