You might also like
- Experiment 10 Analog-to-Digital Converter (ADC) in PIC18F452 ObjectiveDocument10 pagesExperiment 10 Analog-to-Digital Converter (ADC) in PIC18F452 Objectivehira NawazNo ratings yet
- Adc Pic18f452Document8 pagesAdc Pic18f452Muhammad Ummair100% (1)
- Chapter 5 Image Restoration - 01Document37 pagesChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeNo ratings yet
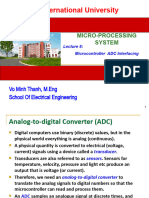
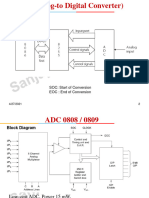
- Lecture 8_ADC InterfacingDocument33 pagesLecture 8_ADC InterfacinglhpaduongNo ratings yet
- Embedded Systems Chapter 13: ADC, DAC and Sensor InterfacingDocument33 pagesEmbedded Systems Chapter 13: ADC, DAC and Sensor Interfacingsumbal_iqbal100% (1)
- Ch13 ADC, DAC and Sensor InterfacingDocument33 pagesCh13 ADC, DAC and Sensor InterfacingSimple knowledgeNo ratings yet
- Analog To Digital Convertor: PIC18f452Document13 pagesAnalog To Digital Convertor: PIC18f452ranaNo ratings yet
- 2 AdcDocument13 pages2 AdcM.i. RehmanNo ratings yet
- ADC TutorialDocument58 pagesADC TutorialveerakumarsNo ratings yet
- AVRDocument20 pagesAVRAhsan KhanNo ratings yet
- PIC18f452 ADC TutorialDocument13 pagesPIC18f452 ADC TutorialMalik Adil FarooqNo ratings yet
- Microprocessor, Interfacing and System Design Analog-to-Digital Converter ModuleDocument26 pagesMicroprocessor, Interfacing and System Design Analog-to-Digital Converter ModuleSani RakibulNo ratings yet
- Adc InterfacingDocument17 pagesAdc Interfacing21ecuog059No ratings yet
- Chapter 7 - ADC ModuleDocument17 pagesChapter 7 - ADC ModuleBùi Tùng DươngNo ratings yet
- UntitledDocument23 pagesUntitlednurul damiaNo ratings yet
- Programming ADC using PIC 18F MicrocontrollerDocument26 pagesProgramming ADC using PIC 18F MicrocontrollergudduNo ratings yet
- ATmega16 ADC Conversion to Digital ValuesDocument7 pagesATmega16 ADC Conversion to Digital ValuesGaurav Shinde100% (1)
- T19 AdcDocument11 pagesT19 AdcReyes Benitez LuisNo ratings yet
- ADC Module: VoltageDocument5 pagesADC Module: VoltageAmmar AlkindyNo ratings yet
- Analog To Digital ConversionDocument16 pagesAnalog To Digital ConversionchinchouNo ratings yet
- ADC InterfacingDocument37 pagesADC InterfacingSaurav ChaudharyNo ratings yet
- Embedded: C and The PIC MicrocontrollerDocument21 pagesEmbedded: C and The PIC MicrocontrollerSamuel TaylorNo ratings yet
- ADC Measurement DetailDocument9 pagesADC Measurement DetailMuhammad SiddiqueNo ratings yet
- 5-10-12 - Analog To Digital ConverterDocument49 pages5-10-12 - Analog To Digital ConverterjagdaNo ratings yet
- ADC Data Acquisition and AnalysisDocument8 pagesADC Data Acquisition and AnalysisAnonymous kT0ONWNo ratings yet
- Pic 18 F 4520Document51 pagesPic 18 F 4520sitizarina78100% (1)
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- Exp 8Document5 pagesExp 8Ashwini KothavaleNo ratings yet
- Topic 13 - ATMega32 ADC in C (ISMAIL - SKE - UTM 2021)Document39 pagesTopic 13 - ATMega32 ADC in C (ISMAIL - SKE - UTM 2021)Aya AmirNo ratings yet
- 2.3 Analog To Digital Converter - Adc (0804)Document4 pages2.3 Analog To Digital Converter - Adc (0804)ssrao2211No ratings yet
- Interfacing ADC With 8051Document15 pagesInterfacing ADC With 8051Pavan Kumar N100% (1)
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- Adc PDFDocument31 pagesAdc PDFjamiebrown7718No ratings yet
- ADC Interfacing With MicrocontrollersDocument9 pagesADC Interfacing With MicrocontrollersLuis MezaNo ratings yet
- The Role of Microcontroller InterruptsDocument16 pagesThe Role of Microcontroller InterruptsHOD-DCE PSG-PTCNo ratings yet
- Adc DacDocument43 pagesAdc DacDeependra NigamNo ratings yet
- Digital Theromometer Using 8051Document17 pagesDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NNo ratings yet
- PIC16F877A LM35 Temp MonitorDocument3 pagesPIC16F877A LM35 Temp MonitorKủ Chuối Vô TìnhNo ratings yet
- EEN11, Finals CombinedDocument105 pagesEEN11, Finals CombinedlavadiajhonNo ratings yet
- Een 11 Finals Lec1Document46 pagesEen 11 Finals Lec1lavadiajhonNo ratings yet
- ADC1Document28 pagesADC1Vincent Aaron SongNo ratings yet
- Assignment Number 2 MPIDocument4 pagesAssignment Number 2 MPISidra AkramNo ratings yet
- 10-Analog To Digital ConverterDocument41 pages10-Analog To Digital ConverterSamuel ChristianNo ratings yet
- Analog To Digital Conversion: IntroductionDocument8 pagesAnalog To Digital Conversion: IntroductionKeyur ParekhNo ratings yet
- United International University: EEE 424: Microprocessor and Interfacing Laboratory Experiment#5Document7 pagesUnited International University: EEE 424: Microprocessor and Interfacing Laboratory Experiment#5Nura Alam ProtikNo ratings yet
- Avr AdcDocument6 pagesAvr AdcMohamed SaadNo ratings yet
- Lecture 5Document80 pagesLecture 5Nour Ziad Ibrahim AlkurdiNo ratings yet
- ADC Analog To Digital ConversionDocument11 pagesADC Analog To Digital Conversionஜெ பர்வீன்No ratings yet
- Adc Programing of Atmega32Document9 pagesAdc Programing of Atmega32Diogo OliveiraNo ratings yet
- Iotuni 23Document19 pagesIotuni 23Ashwin BenkeNo ratings yet
- Power Supply For 8051 MicrocontrollerDocument5 pagesPower Supply For 8051 MicrocontrollerAshok Ekanath KalangeNo ratings yet
- Microcontroller BasicsDocument14 pagesMicrocontroller BasicsholaNo ratings yet
- Lab 11 DAC and ADC Full PackageDocument5 pagesLab 11 DAC and ADC Full PackageLoveWorldCanadaNo ratings yet
- Measuring Distance Using Infrared SensorsDocument5 pagesMeasuring Distance Using Infrared SensorsRajkeen ChamanshaikhNo ratings yet
- EE 120 - Interfacing With The Analog WorldDocument8 pagesEE 120 - Interfacing With The Analog WorldAids SumaldeNo ratings yet
- Laboratory 5 - ADC ManualDocument18 pagesLaboratory 5 - ADC ManualSravan KumarNo ratings yet
- LPC2148 DacDocument14 pagesLPC2148 DacSmruti Pore100% (1)
- Successful Control EthernetDocument7 pagesSuccessful Control EthernetMifzal IzzaniNo ratings yet
- Designing - Reliable - Industrial Ethernet PDFDocument92 pagesDesigning - Reliable - Industrial Ethernet PDFMifzal IzzaniNo ratings yet
- Industrial Network Ethernet Cable SelectionDocument4 pagesIndustrial Network Ethernet Cable SelectionMifzal IzzaniNo ratings yet
- Electrostatic Discharge - Semiconductor PDFDocument24 pagesElectrostatic Discharge - Semiconductor PDFMifzal IzzaniNo ratings yet
- Networks vs. ProtocolsDocument3 pagesNetworks vs. ProtocolsMifzal IzzaniNo ratings yet
- Chapter 1 - Signals & Systems Modelling ConceptsDocument33 pagesChapter 1 - Signals & Systems Modelling ConceptsMifzal IzzaniNo ratings yet
- Analysis of Wireless Industrial Automation Standards: Isa-100.11A and WirelesshartDocument8 pagesAnalysis of Wireless Industrial Automation Standards: Isa-100.11A and WirelesshartMifzal IzzaniNo ratings yet
- Profibus and Modbus - ComparisonDocument15 pagesProfibus and Modbus - ComparisonMifzal IzzaniNo ratings yet
- Chapter 2 - System Modelling and Analysis in Time Domain PDFDocument131 pagesChapter 2 - System Modelling and Analysis in Time Domain PDFMifzal IzzaniNo ratings yet
- Injection Molding High Pressure Dryer Low Pressure Dryer DB - MCDocument4 pagesInjection Molding High Pressure Dryer Low Pressure Dryer DB - MCMifzal IzzaniNo ratings yet
- C2 - TimersDocument41 pagesC2 - TimersMifzal IzzaniNo ratings yet
- FLASH and EEPROM Memories For Data StorageDocument28 pagesFLASH and EEPROM Memories For Data StorageMifzal IzzaniNo ratings yet
- C5 - Parallel Input Output Ports Interfacing2Document53 pagesC5 - Parallel Input Output Ports Interfacing2Mifzal IzzaniNo ratings yet
- C4 - PIC18 Interrupt Programming1Document31 pagesC4 - PIC18 Interrupt Programming1Mifzal IzzaniNo ratings yet
- C1 Per Unit SystemDocument6 pagesC1 Per Unit SystemMifzal IzzaniNo ratings yet
- C3 - Serial Communication Interface-2Document32 pagesC3 - Serial Communication Interface-2Mifzal IzzaniNo ratings yet
- C1 Circuit Theorem and ElectromegnetismDocument9 pagesC1 Circuit Theorem and ElectromegnetismMifzal IzzaniNo ratings yet
- Essay How To Improve EnglishDocument4 pagesEssay How To Improve EnglishMifzal IzzaniNo ratings yet
- CH2 Basic Material Removal of Grinding PDFDocument16 pagesCH2 Basic Material Removal of Grinding PDFMifzal IzzaniNo ratings yet
- Society NotesDocument7 pagesSociety NotesMifzal IzzaniNo ratings yet
- Basic variance analysis formulasDocument1 pageBasic variance analysis formulasMifzal IzzaniNo ratings yet
- CH2 Basic Material Removal of Grinding PDFDocument16 pagesCH2 Basic Material Removal of Grinding PDFMifzal IzzaniNo ratings yet
- Good English Skills Are Vital To Succeeding in LifeDocument1 pageGood English Skills Are Vital To Succeeding in LifeMifzal IzzaniNo ratings yet
- Answer For PAST YEAR QuestionDocument8 pagesAnswer For PAST YEAR QuestionMifzal IzzaniNo ratings yet
- GRINDING TechnologyDocument7 pagesGRINDING TechnologyMifzal IzzaniNo ratings yet
- Answer For PAST YEAR QuestionDocument8 pagesAnswer For PAST YEAR QuestionMifzal IzzaniNo ratings yet
- Optimization of Cyclone Gasifier Design for Agricultural Waste Gasification using Finite Element MethodDocument30 pagesOptimization of Cyclone Gasifier Design for Agricultural Waste Gasification using Finite Element MethodMifzal IzzaniNo ratings yet
- Import and analyze CAD model for injection moldingDocument23 pagesImport and analyze CAD model for injection moldingMifzal IzzaniNo ratings yet
- Market Plan Refresher Box Fresh StorageDocument3 pagesMarket Plan Refresher Box Fresh StorageMifzal IzzaniNo ratings yet
- Adjustable Cable Equalizer Combines Wideband Differential ReceiverDocument4 pagesAdjustable Cable Equalizer Combines Wideband Differential ReceiverAkhileshKesavanunnithanNo ratings yet
- Sinus SamuraiDocument5 pagesSinus SamuraiIziNo ratings yet
- Not Required: Verification of Equipment (Weekly)Document3 pagesNot Required: Verification of Equipment (Weekly)asdasdasdasdNo ratings yet
- Multi RateDocument8 pagesMulti RateIamINNo ratings yet
- Eq 140802022456 Phpapp01Document41 pagesEq 140802022456 Phpapp01Mohammed ZeyadNo ratings yet
- Super Listener: 2. Signal ProcessingDocument4 pagesSuper Listener: 2. Signal ProcessingijaertNo ratings yet
- MC0086Document14 pagesMC0086puneetchawla2003No ratings yet
- Cone Beam Reconstruction: Jiang Hsieh, PH.DDocument48 pagesCone Beam Reconstruction: Jiang Hsieh, PH.Dit's somvanshiNo ratings yet
- Multitone Testing of Sound System Components - Some Results and Conclusions, Part 1: History and TheoryDocument40 pagesMultitone Testing of Sound System Components - Some Results and Conclusions, Part 1: History and Theoryjose kornelukNo ratings yet
- Digital Signal Processing Lab ManualDocument201 pagesDigital Signal Processing Lab ManualSai Nikshipth MaddhugaruNo ratings yet
- EqulizerDocument18 pagesEqulizerMahesh KrNo ratings yet
- Assignment PDFDocument26 pagesAssignment PDFjagannath MPNo ratings yet
- Better MixesDocument2 pagesBetter MixestherealmmtNo ratings yet
- Experiment 6Document14 pagesExperiment 6050 - B - SumitNo ratings yet
- S218 NTLWDocument17 pagesS218 NTLWFarell EndresNo ratings yet
- Chapter-6 Seismic Data ProcessingDocument19 pagesChapter-6 Seismic Data Processingtarunag72801No ratings yet
- Channel Coding TheoremDocument23 pagesChannel Coding TheoremHossamSalahNo ratings yet
- Analog - Sine Wave Generation With Psoc 1 (Demonstration With CTCSS)Document11 pagesAnalog - Sine Wave Generation With Psoc 1 (Demonstration With CTCSS)Adonis LealNo ratings yet
- DSP-Chapter1 Student 28062015Document45 pagesDSP-Chapter1 Student 28062015NguyenThaoNo ratings yet
- Clear & Crisp Sound: WOODPECKER SW-M50 5.1 SystemDocument1 pageClear & Crisp Sound: WOODPECKER SW-M50 5.1 SystemkejtecNo ratings yet
- CP 5/CP 50 DatalistDocument42 pagesCP 5/CP 50 Datalistmiksub68No ratings yet
- Analog to Digital and Digital to Analog Conversion LabDocument7 pagesAnalog to Digital and Digital to Analog Conversion LabAbdirazak Mahamoud DjamaNo ratings yet
- Harman Kardon BassLink Service Manual PDFDocument56 pagesHarman Kardon BassLink Service Manual PDFtingNo ratings yet
- Frequency TableDocument14 pagesFrequency TableatulchurchaNo ratings yet
- GTU M.E. Semester III Exam Advanced Digital CommunicationDocument2 pagesGTU M.E. Semester III Exam Advanced Digital CommunicationNishita SharmaNo ratings yet
- Fill in The BlanksDocument38 pagesFill in The BlanksM S TejaNo ratings yet
- Filter CircuitsDocument15 pagesFilter CircuitsANWAR SHADMANNo ratings yet
- A Mismatch Calibration Technique For SAR ADCs Based On Deterministic Self-Calibration and Stochastic QuantizationDocument14 pagesA Mismatch Calibration Technique For SAR ADCs Based On Deterministic Self-Calibration and Stochastic QuantizationAnand ChaudharyNo ratings yet
- Ceragon NASPO ValuePoint Pricelist (3!16!16)Document52 pagesCeragon NASPO ValuePoint Pricelist (3!16!16)Luis SanchezNo ratings yet