You might also like
- Solution of Transient Transport Equation Using An Upstream Finite Element SchemeDocument11 pagesSolution of Transient Transport Equation Using An Upstream Finite Element SchemechrissbansNo ratings yet
- Journal of Computational and Applied Mathematics Model-Trust AlgorithmDocument11 pagesJournal of Computational and Applied Mathematics Model-Trust AlgorithmCândida MeloNo ratings yet
- Gradient-Based Optimization TechniquesDocument21 pagesGradient-Based Optimization TechniquesNeha Randhar DagaNo ratings yet
- Iterative Minimization of Energy Part 2Document20 pagesIterative Minimization of Energy Part 2Sameh LotfyNo ratings yet
- Gradient Descent PDFDocument9 pagesGradient Descent PDFbouharaouamanalNo ratings yet
- Steepest DescentDocument7 pagesSteepest DescentstankccNo ratings yet
- p2752 1-Hawking BH-EntropyDocument5 pagesp2752 1-Hawking BH-EntropyRafael B FrigoriNo ratings yet
- Molecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDocument9 pagesMolecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDushyant PatelNo ratings yet
- EigifpDocument11 pagesEigifpSepliongNo ratings yet
- Genetically evolved phase aggregation technique controls linear arraysDocument18 pagesGenetically evolved phase aggregation technique controls linear arrayspuja.sarkarNo ratings yet
- Projected Gradient Methods For Linearly Constrained Problems - Calamai, Moré (1987)Document24 pagesProjected Gradient Methods For Linearly Constrained Problems - Calamai, Moré (1987)Emerson ButynNo ratings yet
- QrmethodDocument13 pagesQrmethodAshish MeenaNo ratings yet
- Quantum Mechanics On Spaces of Nonconstant Curvature: The Oscillator Problem and SuperintegrabilityDocument26 pagesQuantum Mechanics On Spaces of Nonconstant Curvature: The Oscillator Problem and SuperintegrabilityCarlos LopezNo ratings yet
- School of Computer Science and Applied MathematicsDocument8 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- Electromagnetism II: Electricity: 1 The Method of ImagesDocument18 pagesElectromagnetism II: Electricity: 1 The Method of ImagesohitznothingNo ratings yet
- ConvergeofHybridSpaceMapping AlgDocument12 pagesConvergeofHybridSpaceMapping AlgSofian Harissa DarmaNo ratings yet
- Financial Forecasting and Gradient DescentDocument6 pagesFinancial Forecasting and Gradient Descentp_saneckiNo ratings yet
- 32 CongressDocument18 pages32 CongressSidney LinsNo ratings yet
- GLRT-based Detection in SIRV Clutter With Steering Vector MismatchesDocument4 pagesGLRT-based Detection in SIRV Clutter With Steering Vector MismatchesNguyễn Văn TrườngNo ratings yet
- Conjugate Gradient MethodDocument8 pagesConjugate Gradient MethodDavid HumeNo ratings yet
- Initial Improvement of The Hybrid Accelerated Gradient Descent ProcessDocument8 pagesInitial Improvement of The Hybrid Accelerated Gradient Descent ProcessСтефан ПанићNo ratings yet
- REGULARIZATION AND RENORMALIZATION OF GAUGE FIELDSDocument25 pagesREGULARIZATION AND RENORMALIZATION OF GAUGE FIELDSSantiago Ballesteros BarreraNo ratings yet
- Unified derivation of evolution equationsDocument17 pagesUnified derivation of evolution equationslev76No ratings yet
- Nichita 2001Document9 pagesNichita 2001franciani goedertNo ratings yet
- Ale Methods For Determining Stationary Solutions of Metal Forming ProcessesDocument10 pagesAle Methods For Determining Stationary Solutions of Metal Forming ProcessesosternpriyambodoNo ratings yet
- Yang-Mills Instantons and The S-Matrix (1979)Document19 pagesYang-Mills Instantons and The S-Matrix (1979)oldmanbearsNo ratings yet
- DownloadDocument7 pagesDownloadnootsamNo ratings yet
- Second-Order Projection Scheme for k-epsilon Turbulence ModelDocument7 pagesSecond-Order Projection Scheme for k-epsilon Turbulence ModelmecharashNo ratings yet
- Nucl - Phys.B v.612Document516 pagesNucl - Phys.B v.612buddy72No ratings yet
- A Non-Linear Multigrid Method For The Steady Euler EquationsDocument22 pagesA Non-Linear Multigrid Method For The Steady Euler EquationsYann DelormeNo ratings yet
- A Fast, Unstructured Panel Solver: John MooreDocument12 pagesA Fast, Unstructured Panel Solver: John MooreIuga VasileNo ratings yet
- Steven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodDocument25 pagesSteven L. Mielke Et Al - Extrapolation and Perturbation Schemes For Accelerating The Convergence of Quantum Mechanical Free Energy Calculations Via The Fourier Path-Integral Monte Carlo MethodWippetsxzNo ratings yet
- Coordinate Conversion Formulae - UTMtoGeoDocument6 pagesCoordinate Conversion Formulae - UTMtoGeoMecatronicanaNetNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- Statistical Mechanics Lecture Notes (2006), L13Document7 pagesStatistical Mechanics Lecture Notes (2006), L13OmegaUserNo ratings yet
- A Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsDocument21 pagesA Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsLorena Monterrosas PérezNo ratings yet
- FEM - Arc-Lenght - Sumup TechniquesDocument11 pagesFEM - Arc-Lenght - Sumup TechniquesabimalainNo ratings yet
- Pub 06Document21 pagesPub 06παπαδοπουλοςNo ratings yet
- Distance Transforms of Sampled FunctionsDocument15 pagesDistance Transforms of Sampled FunctionsHuy Nguyễn BảoNo ratings yet
- Algorithms for attitude estimation using GPS phase measurementsDocument14 pagesAlgorithms for attitude estimation using GPS phase measurementsSuresh KumarNo ratings yet
- Quantum Kibble-Zurek Mechanism and Critical Dynamics On A Programmable Rydberg SimulatorDocument16 pagesQuantum Kibble-Zurek Mechanism and Critical Dynamics On A Programmable Rydberg SimulatorPietro SilviNo ratings yet
- Least-Squares Problem, I.e., As A Sum Of: R NotDocument7 pagesLeast-Squares Problem, I.e., As A Sum Of: R NotBrenda Naranjo MorenoNo ratings yet
- An Algorithm for the Computation of EigenvaluesDocument44 pagesAn Algorithm for the Computation of Eigenvalues孔翔鸿No ratings yet
- Tackling The Gross-Pitaevskii Energy Functional With The Sobolev Gradient - Analytical and Numerical ResultsDocument30 pagesTackling The Gross-Pitaevskii Energy Functional With The Sobolev Gradient - Analytical and Numerical ResultscocoaramirezNo ratings yet
- Complex gnc05 PDFDocument17 pagesComplex gnc05 PDFVignesh RamakrishnanNo ratings yet
- An Aggregation Multilevel Iterative Solver With Shift Acceleration For Eigenvalue Analysis of Large-Scale StructuresDocument9 pagesAn Aggregation Multilevel Iterative Solver With Shift Acceleration For Eigenvalue Analysis of Large-Scale Structurespio mirandaNo ratings yet
- A New Mixed Model Based On The Velocity Structure FunctionDocument16 pagesA New Mixed Model Based On The Velocity Structure FunctioncarlosfnbsilvaNo ratings yet
- 16.0 AppendicesDocument3 pages16.0 AppendicesShengyi XuNo ratings yet
- Multigrid Algorithms For Inverse Problems With Linear Parabolic Pde ConstraintsDocument29 pagesMultigrid Algorithms For Inverse Problems With Linear Parabolic Pde Constraintsapi-19973331No ratings yet
- P.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessDocument4 pagesP.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessflausenNo ratings yet
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroNo ratings yet
- Lab Report S2Document9 pagesLab Report S2Leonard SawyerNo ratings yet
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDocument18 pagesGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaNo ratings yet
- New index calculus algorithm achieves L(1/4 + o(1)) complexityDocument23 pagesNew index calculus algorithm achieves L(1/4 + o(1)) complexityawais04No ratings yet
- CCP6 SlavaDocument10 pagesCCP6 SlavaAndres PalchucanNo ratings yet
- Perturbative Yang-Mills Ground State in The Temporal GaugeDocument7 pagesPerturbative Yang-Mills Ground State in The Temporal GaugeCroco AliNo ratings yet
- Gmres SiamDocument14 pagesGmres SiamKien NguyenNo ratings yet
- (Ir (NLL: A Robust Gmres-Based Adaptive Polynomial Preconditioning Algorithm For Nonsymmetric Linear JouberttDocument13 pages(Ir (NLL: A Robust Gmres-Based Adaptive Polynomial Preconditioning Algorithm For Nonsymmetric Linear JouberttaabbNo ratings yet
- An Entropy Variable-Based Gridfree Solver With Lu-Sgs AcceleratorDocument7 pagesAn Entropy Variable-Based Gridfree Solver With Lu-Sgs AcceleratorAnandh NarayananNo ratings yet
- Zico Vich Wilson 2001Document13 pagesZico Vich Wilson 2001Lorena Monterrosas PérezNo ratings yet
- SchnoodgeDocument10 pagesSchnoodgeLorena Monterrosas PérezNo ratings yet
- Roos M. Introduction To Cosmology (3ed., Wiley, 2003) (ISBN 0470849096) (287s)Document287 pagesRoos M. Introduction To Cosmology (3ed., Wiley, 2003) (ISBN 0470849096) (287s)Lorena Monterrosas PérezNo ratings yet
- Hartree Fock Geometry Optimisation of Periodic Systems With The C CodeDocument8 pagesHartree Fock Geometry Optimisation of Periodic Systems With The C CodeLorena Monterrosas PérezNo ratings yet
- Using Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionDocument8 pagesUsing Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionLorena Monterrosas PérezNo ratings yet
- Geometry Optimization in Redundant Internal CoordinatesDocument6 pagesGeometry Optimization in Redundant Internal CoordinatesLorena Monterrosas PérezNo ratings yet
- The Calculation of Ab Initio Molecular Geometries: Efficient Optimization by Natural Internal Coordinates and Empirical Correction by Offset ForcesDocument11 pagesThe Calculation of Ab Initio Molecular Geometries: Efficient Optimization by Natural Internal Coordinates and Empirical Correction by Offset ForcesLorena Monterrosas PérezNo ratings yet
- Geometry Optimization of Periodic Systems Using Internal CoordinatesDocument10 pagesGeometry Optimization of Periodic Systems Using Internal CoordinatesLorena Monterrosas Pérez100% (1)
- Anglada Et Al-1997-International Journal of Quantum ChemistryDocument13 pagesAnglada Et Al-1997-International Journal of Quantum ChemistryLorena Monterrosas PérezNo ratings yet
- Using Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionDocument8 pagesUsing Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionLorena Monterrosas PérezNo ratings yet
- A Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsDocument21 pagesA Modified BFGS Method and Its Global Convergence in Nonconvex Minimization - 2001 - Journal of Computational and Applied MathematicsLorena Monterrosas PérezNo ratings yet
- GaleDocument9 pagesGaleLorena Monterrosas PérezNo ratings yet
- CRYSTAL14 Program for Ab Initio Investigation of Crystalline SolidsDocument31 pagesCRYSTAL14 Program for Ab Initio Investigation of Crystalline SolidsLorena Monterrosas PérezNo ratings yet
- CRYSTAL14 Program for Ab Initio Investigation of Crystalline SolidsDocument31 pagesCRYSTAL14 Program for Ab Initio Investigation of Crystalline SolidsLorena Monterrosas PérezNo ratings yet
- Anglada Et Al-1998-Journal of Computational ChemistryDocument14 pagesAnglada Et Al-1998-Journal of Computational ChemistryLorena Monterrosas PérezNo ratings yet
- Comprehensive Overview of Complex Dynamical SystemDocument1,305 pagesComprehensive Overview of Complex Dynamical SystemPaul Morrissette100% (10)
- Fdsðwxor 5 Od Ghvfulsflöq GH XQ PHGLR FRQWLQXR Ghirupdeoh1: 514 FRQFHSWRV Jhqhudohv1Document14 pagesFdsðwxor 5 Od Ghvfulsflöq GH XQ PHGLR FRQWLQXR Ghirupdeoh1: 514 FRQFHSWRV Jhqhudohv1Lorena Monterrosas PérezNo ratings yet
- Khomskii-Basic Aspects of The Quantum Theory of Solids Order and Elementary Excitations PDFDocument317 pagesKhomskii-Basic Aspects of The Quantum Theory of Solids Order and Elementary Excitations PDFLorena Monterrosas PérezNo ratings yet
- KAM Theory and Celestial MechanicsDocument24 pagesKAM Theory and Celestial MechanicsLorena Monterrosas PérezNo ratings yet
- Elkins-Tanton L.D.-Uranus, Neptune, Pluto, and The Outer Solar System (2006) PDFDocument225 pagesElkins-Tanton L.D.-Uranus, Neptune, Pluto, and The Outer Solar System (2006) PDFLorena Monterrosas Pérez100% (1)
- White Blood Cell Crochet PatternDocument3 pagesWhite Blood Cell Crochet PatternLorena Monterrosas PérezNo ratings yet
- NoN Covalente ForcesDocument528 pagesNoN Covalente ForcesLorena Monterrosas PérezNo ratings yet
- Mahadevi16cr116 2775Document51 pagesMahadevi16cr116 2775Lorena Monterrosas PérezNo ratings yet
- Comprehensive Overview of Complex Dynamical SystemDocument1,305 pagesComprehensive Overview of Complex Dynamical SystemPaul Morrissette100% (10)
- Earl Lenmeyer The Flask-1Document2 pagesEarl Lenmeyer The Flask-1Lorena Monterrosas Pérez100% (1)
- Transition State Optimization: Z-Matrix Coordinates Generally SuperiorDocument17 pagesTransition State Optimization: Z-Matrix Coordinates Generally SuperiorLorena Monterrosas PérezNo ratings yet
- Numerical Methods For Unconstrained Optimization and Nonlinear Equations Classics in Applied MathematicsDocument395 pagesNumerical Methods For Unconstrained Optimization and Nonlinear Equations Classics in Applied Mathematicsmohammad_albooyeh100% (9)
- Thermodynamics, Statistical Mechanics, & KineticsDocument567 pagesThermodynamics, Statistical Mechanics, & KineticsLorena Monterrosas Pérez100% (1)
- MolecularEnergyLevelsNotes PDFDocument5 pagesMolecularEnergyLevelsNotes PDFLorena Monterrosas PérezNo ratings yet
- Data Sheet PLIED - 1500 MM X 1250-5 PlyDocument1 pageData Sheet PLIED - 1500 MM X 1250-5 PlySales support TechnicalNo ratings yet
- Build and Turn Well Planning Methods: Plan Tab (Plan Editor Dialog)Document2 pagesBuild and Turn Well Planning Methods: Plan Tab (Plan Editor Dialog)sina giahkarNo ratings yet
- Đề Ôn 3Document3 pagesĐề Ôn 3Linh HoàngNo ratings yet
- Sma 2304 Ordinary Differential Equations 1Document2 pagesSma 2304 Ordinary Differential Equations 1Joe NjoreNo ratings yet
- Abb Motors Pricelist PDFDocument12 pagesAbb Motors Pricelist PDFAnshika EngineeringNo ratings yet
- Experiment 3: Ballistic PendulumDocument11 pagesExperiment 3: Ballistic PendulumsyafNo ratings yet
- Trapezoidal Rule Area Under CurveDocument6 pagesTrapezoidal Rule Area Under CurveKristian CabretaNo ratings yet
- Analysis and Modelling of Crate and Bottle Separator: DesignDocument27 pagesAnalysis and Modelling of Crate and Bottle Separator: DesignSileshNo ratings yet
- Phil 104 Philosophy and SocietyDocument79 pagesPhil 104 Philosophy and SocietyAbu Adam Ibrahim100% (2)
- TestDocument9 pagesTestArgielJohn LlagasNo ratings yet
- Appendix K PDFDocument28 pagesAppendix K PDFquyenbk92No ratings yet
- Variational Asymptotic Method For Unit Cell Homogenizationof Periodically Heterogeneous MaterialsDocument18 pagesVariational Asymptotic Method For Unit Cell Homogenizationof Periodically Heterogeneous MaterialsbiluvarNo ratings yet
- Infiltration Rate TestDocument6 pagesInfiltration Rate TestasadNo ratings yet
- Barg and BaraDocument6 pagesBarg and BaraGhali_the_monsterNo ratings yet
- Malware Infographics by SlidesgoDocument33 pagesMalware Infographics by SlidesgoAfryan ArdiansyahNo ratings yet
- 3r Quarter Test Grade 8 EditedDocument3 pages3r Quarter Test Grade 8 Editedmay marigondonNo ratings yet
- Tailings Dam Breach ModelingDocument126 pagesTailings Dam Breach ModelingFranco VillacortaNo ratings yet
- Fourier Transform PresentationDocument14 pagesFourier Transform PresentationShabna KrishNo ratings yet
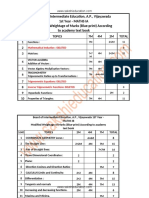
- Board of Intermediate Education, A.P., Vijayawada 1st Year - MATHS IA Modified Weightage BlueprintDocument4 pagesBoard of Intermediate Education, A.P., Vijayawada 1st Year - MATHS IA Modified Weightage BlueprintNookala Yaswanth123No ratings yet
- Astm e 23Document27 pagesAstm e 23Telmo VianaNo ratings yet
- Flow Visualization inDocument2 pagesFlow Visualization inVeeramani ShankarNo ratings yet
- East West University: Electrical Circuits LabDocument4 pagesEast West University: Electrical Circuits LabSharminNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzDocument34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzMarcelo LimaNo ratings yet
- Service Manual Screenmaster NewDocument26 pagesService Manual Screenmaster Newmohamed abdelzaherNo ratings yet
- Automation & Artificial Intelligence: Robots and Their ApplicationsDocument93 pagesAutomation & Artificial Intelligence: Robots and Their ApplicationsManal AndhereNo ratings yet
- Gas compressibility factors and propertiesDocument3 pagesGas compressibility factors and propertiesjhchung111No ratings yet
- AP Calculus BC 2007 Scoring Guidelines: The College Board: Connecting Students To College SuccessDocument7 pagesAP Calculus BC 2007 Scoring Guidelines: The College Board: Connecting Students To College SuccessMr. PopoNo ratings yet
- Test Bank For College Physics 7th Edition Jerry D WilsonDocument24 pagesTest Bank For College Physics 7th Edition Jerry D WilsonlouisadonaldlwrNo ratings yet
- 1.2. General Design Provisions For National Structural Code of The Philippines - CE 013-CE31S7 - Building Systems DesignDocument2 pages1.2. General Design Provisions For National Structural Code of The Philippines - CE 013-CE31S7 - Building Systems DesignAlexis DulayNo ratings yet
- Assess The Fire Resistance of Intumescent Coatings by Equivalent Constant Thermal ResistanceDocument19 pagesAssess The Fire Resistance of Intumescent Coatings by Equivalent Constant Thermal ResistanceMatheus CiveiraNo ratings yet