You might also like
- Gear Fault Detection Using Artificial Neural Netwo PDFDocument15 pagesGear Fault Detection Using Artificial Neural Netwo PDFdado djanatiNo ratings yet
- Full Paper 226Document9 pagesFull Paper 226Kawthar AlamehNo ratings yet
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityFrom EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityNo ratings yet
- C199 EWSHM 2012 Tu2e1Document9 pagesC199 EWSHM 2012 Tu2e1mahesh MNo ratings yet
- Improved Incremental Orthogonal Centroid Algorithm For Visualising Pipeline Sensor DatasetsDocument13 pagesImproved Incremental Orthogonal Centroid Algorithm For Visualising Pipeline Sensor DatasetstecnicoengenNo ratings yet
- 2 PDFDocument15 pages2 PDFAtoui IssamNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Unsupervised Spike Detection and Sorting with Wavelets and Superparamagnetic ClusteringDocument27 pagesUnsupervised Spike Detection and Sorting with Wavelets and Superparamagnetic ClusteringAli RoustazadeNo ratings yet
- Multiresolution Signal Decomposition: Transforms, Subbands, and WaveletsFrom EverandMultiresolution Signal Decomposition: Transforms, Subbands, and WaveletsNo ratings yet
- Evaluation of Dump Slope Stability of A Coal Mine Using Artificial Neuralnetwork 2168 9806 1000128Document5 pagesEvaluation of Dump Slope Stability of A Coal Mine Using Artificial Neuralnetwork 2168 9806 1000128Abhijeet Dutta100% (1)
- Nguyễn Văn QuýDocument10 pagesNguyễn Văn Quýquyhoi2k2No ratings yet
- Grabow Ska 2008Document13 pagesGrabow Ska 2008Thiago PereiraNo ratings yet
- Mechanical Systems and Signal ProcessingDocument16 pagesMechanical Systems and Signal ProcessingMarina GamaNo ratings yet
- A Technique For Frequency Converter-Fed AsynchronoDocument21 pagesA Technique For Frequency Converter-Fed AsynchronoDũng Đỗ TiếnNo ratings yet
- Material RemovalDocument10 pagesMaterial RemovalIAEME PublicationNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionFrom EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNo ratings yet
- Article ICITDocument7 pagesArticle ICITKawthar AlamehNo ratings yet
- Fault Diagnosis in Analog Electronic Circuits - THDocument16 pagesFault Diagnosis in Analog Electronic Circuits - THBorut ViNo ratings yet
- 3 - 33044 IJAERok34390 34395Document7 pages3 - 33044 IJAERok34390 34395prosperNo ratings yet
- Wavelet Fault Diagnosis of Induction MotorDocument26 pagesWavelet Fault Diagnosis of Induction MotorkanuvietNo ratings yet
- New Sensors and Processing ChainFrom EverandNew Sensors and Processing ChainJean-Hugh ThomasNo ratings yet
- Comparing ANN Types for Structural Dynamics PredictionsDocument16 pagesComparing ANN Types for Structural Dynamics Predictionsvicto1111No ratings yet
- SM Mimo ModDocument21 pagesSM Mimo ModAsma Bouhlel YounesNo ratings yet
- Multivariate Air Quality Forecasting With Nested Long Short Term Memory Neural NetworkDocument9 pagesMultivariate Air Quality Forecasting With Nested Long Short Term Memory Neural NetworkducksgomooNo ratings yet
- A Stack-Based Routing Methodology For Nanometric Analogue CMOS DevicesDocument7 pagesA Stack-Based Routing Methodology For Nanometric Analogue CMOS DevicesSiddharthSharmaNo ratings yet
- Modeling Approach and Fault Index Analysis of A VoDocument7 pagesModeling Approach and Fault Index Analysis of A VoKawthar AlamehNo ratings yet
- Application of Machine Learning Algorithms To Flow Modeling and OptimizationDocument10 pagesApplication of Machine Learning Algorithms To Flow Modeling and OptimizationDanielNo ratings yet
- Modeling and stability analysis tools for grid-connected power convertersDocument18 pagesModeling and stability analysis tools for grid-connected power convertersEletricaNo ratings yet
- Comparison of Machine Learning Algorithms For Induction MotorRotor SingleFault Diagnosis Using Stator Current SignalDocument6 pagesComparison of Machine Learning Algorithms For Induction MotorRotor SingleFault Diagnosis Using Stator Current SignalVelumani sNo ratings yet
- Survey On Applications Numerical Methods in EngineeringDocument7 pagesSurvey On Applications Numerical Methods in EngineeringIJRASETPublicationsNo ratings yet
- Vehicular Technologies Increasing ConnectivityDocument458 pagesVehicular Technologies Increasing ConnectivityJosé RamírezNo ratings yet
- Vibration Isolation Control of Inertial Navigation Sensors Using Transfer Matrix Method For Multibody SystemsDocument16 pagesVibration Isolation Control of Inertial Navigation Sensors Using Transfer Matrix Method For Multibody Systemsmostafakhalil.mtcNo ratings yet
- Channel Estimation For IEEE802.15.11Document12 pagesChannel Estimation For IEEE802.15.11nelsitotovarNo ratings yet
- Gear Noise Evaluation Through Multibody TE-based S PDFDocument15 pagesGear Noise Evaluation Through Multibody TE-based S PDFFiras BejarNo ratings yet
- 2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkDocument11 pages2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkimadldnNo ratings yet
- DECISION TREE FOR FEATURE SELECTION TO DIAGNOSIS OF BELT CONVEYOR IDLERDocument9 pagesDECISION TREE FOR FEATURE SELECTION TO DIAGNOSIS OF BELT CONVEYOR IDLERJoão SoaresNo ratings yet
- 1038-Article Text-2121-1-10-20231001Document17 pages1038-Article Text-2121-1-10-20231001Worl BossNo ratings yet
- Complex system health management using condition monitoring and test dataDocument15 pagesComplex system health management using condition monitoring and test dataচারুলতা নীর সেনNo ratings yet
- RF outperforms ANNs and SVMs for intelligent diagnosis of rotating machineryDocument13 pagesRF outperforms ANNs and SVMs for intelligent diagnosis of rotating machineryPradeep KunduNo ratings yet
- Analysis of Dynamic Wireless Power Transfer SystemDocument15 pagesAnalysis of Dynamic Wireless Power Transfer SystemJulián Peláez RestrepoNo ratings yet
- Dynamic Analysis of Vibration Screen PDFDocument6 pagesDynamic Analysis of Vibration Screen PDFBhuvanessh RcNo ratings yet
- Dem Analysis of Vibration Screen PDFDocument6 pagesDem Analysis of Vibration Screen PDFgunajiNo ratings yet
- Transfer Path Analysis and Consideration of DampingDocument14 pagesTransfer Path Analysis and Consideration of DampingdnpscribdNo ratings yet
- Sensors 21 00891 v2Document17 pagesSensors 21 00891 v2nixmeupdrfjaexhvgaNo ratings yet
- Reduced Order Modeling For Transient Analysis of Carbon Nanotubes InterconnectsDocument6 pagesReduced Order Modeling For Transient Analysis of Carbon Nanotubes InterconnectsRavi KakaniNo ratings yet
- 1 s2.0 S0263224120302050 MainDocument12 pages1 s2.0 S0263224120302050 MainCristian BastiasNo ratings yet
- Preliminary Study On Magnetic Levitation Modeling Using PID ControlDocument7 pagesPreliminary Study On Magnetic Levitation Modeling Using PID ControlSkyFaLL-CSNo ratings yet
- 0-MSSP Final PublishedDocument17 pages0-MSSP Final Published115Akshay RathodNo ratings yet
- Embedded Mechatronic Systems 2: Analysis of Failures, Modeling, Simulation and OptimizationFrom EverandEmbedded Mechatronic Systems 2: Analysis of Failures, Modeling, Simulation and OptimizationNo ratings yet
- SMH ChapterDocument14 pagesSMH ChapterSaba AliyariNo ratings yet
- New optimal feature selection algorithm classifies power quality disturbancesDocument25 pagesNew optimal feature selection algorithm classifies power quality disturbancesShristi SinghNo ratings yet
- A New Bearing Fault Detection and Diagnosis Scheme Based On Hidden Markov Modeling of Vibration SignalsDocument5 pagesA New Bearing Fault Detection and Diagnosis Scheme Based On Hidden Markov Modeling of Vibration SignalsIlluminati Sky EulerNo ratings yet
- Using Artificial Neural Networks for Analog Integrated Circuit Design AutomationFrom EverandUsing Artificial Neural Networks for Analog Integrated Circuit Design AutomationNo ratings yet
- Access 2017 2773460Document16 pagesAccess 2017 2773460captain americaNo ratings yet
- 10 Simultaneous - in - Situ - Direction - Finding - and - Field - Manipulation - Based - On - Space-Time-Coding - Digital - MetasurfaceDocument10 pages10 Simultaneous - in - Situ - Direction - Finding - and - Field - Manipulation - Based - On - Space-Time-Coding - Digital - MetasurfaceAnuj SharmaNo ratings yet
- AllzaltvcodeDocument1 pageAllzaltvcodedado djanatiNo ratings yet
- Mechanical Systems and Signal Processing (1996) 10(2), 125–134: A Wavelet-Based Algorithm for the Hilbert TransformDocument10 pagesMechanical Systems and Signal Processing (1996) 10(2), 125–134: A Wavelet-Based Algorithm for the Hilbert Transformdado djanatiNo ratings yet
- Mechanical Systems and Signal Processing: Yuh-Tay SheenDocument10 pagesMechanical Systems and Signal Processing: Yuh-Tay Sheendado djanatiNo ratings yet
- Mechanical Systems and Signal Processing: Konstantinos C. Gryllias, Ioannis A. AntoniadisDocument18 pagesMechanical Systems and Signal Processing: Konstantinos C. Gryllias, Ioannis A. Antoniadisdado djanatiNo ratings yet
- Structural Damage Detection Using The Combination Method of EMD and Wavelet AnalysisDocument9 pagesStructural Damage Detection Using The Combination Method of EMD and Wavelet Analysisdado djanatiNo ratings yet
- Mechanical Systems and Signal ProcessingDocument26 pagesMechanical Systems and Signal Processingdado djanatiNo ratings yet
- Application of Emdmethod and Hilbert Spectrum To The Fault Diagnosis of Roller BearingsDocument12 pagesApplication of Emdmethod and Hilbert Spectrum To The Fault Diagnosis of Roller Bearingsdado djanatiNo ratings yet
- WangDocument11 pagesWangHua Hidari YangNo ratings yet
- Mourad Kedadouche AVE2014-mt4Document8 pagesMourad Kedadouche AVE2014-mt4dado djanatiNo ratings yet
- Applsci 09 01696 v2 PDFDocument15 pagesApplsci 09 01696 v2 PDFdado djanatiNo ratings yet
- برمجة الأردوينو ArduinoProgrammingDocument152 pagesبرمجة الأردوينو ArduinoProgrammingSafi Farjallag60% (5)
- Applsci 09 01696 v2 PDFDocument15 pagesApplsci 09 01696 v2 PDFdado djanatiNo ratings yet
- Reliability Based Maintenance Strategy Selection in Process Plants: A Case StudyDocument8 pagesReliability Based Maintenance Strategy Selection in Process Plants: A Case StudyAline MariaNo ratings yet
- 3 Electronic ComponentsDocument53 pages3 Electronic Componentsdado djanatiNo ratings yet
- Back Up Your Files To The Cloud PDFDocument1 pageBack Up Your Files To The Cloud PDFJachistyo CckNo ratings yet
- CAD32M7 Data SheetDocument2 pagesCAD32M7 Data SheetMehmet EngürNo ratings yet
- Organization Management and LeadershipDocument26 pagesOrganization Management and LeadershipOtilia BadeaNo ratings yet
- Start Input System Data and Load Demand: From RA List by Listing All Recommended Ra and Their Combinations (NRA)Document1 pageStart Input System Data and Load Demand: From RA List by Listing All Recommended Ra and Their Combinations (NRA)Shoaib SamiNo ratings yet
- Module 14 - Final FilesDocument1,042 pagesModule 14 - Final FilesMinami KotoriNo ratings yet
- Underplate GroutingDocument1 pageUnderplate GroutingminedataNo ratings yet
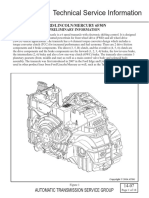
- Technical Service Information: Ford/Lincoln/Mercury 6F50NDocument18 pagesTechnical Service Information: Ford/Lincoln/Mercury 6F50NPlanta Damiana2No ratings yet
- Rubrics For Interd TaskDocument3 pagesRubrics For Interd Taskapi-265986384No ratings yet
- BJT AmplifiersDocument21 pagesBJT AmplifiersAligato John RayNo ratings yet
- Defibrelator ch1Document31 pagesDefibrelator ch1د.محمد عبد المنعم الشحاتNo ratings yet
- The Nigerian Marketing System Its Development - Problems and ProspectsDocument8 pagesThe Nigerian Marketing System Its Development - Problems and ProspectsNwakor Maco Sochi100% (1)
- Solid State Physics by Kettel Chapter 4Document17 pagesSolid State Physics by Kettel Chapter 4Taseer BalochNo ratings yet
- A Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorDocument13 pagesA Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorJack WenNo ratings yet
- Walsh, S. (2006)Document10 pagesWalsh, S. (2006)ratu erlindaNo ratings yet
- Evaluation of Earthquake-Induced Cracking of Embankment DamsDocument21 pagesEvaluation of Earthquake-Induced Cracking of Embankment DamsMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- The Future of Luxury Fashion ReportDocument70 pagesThe Future of Luxury Fashion Reportsalma andjaniNo ratings yet
- Ryan Ashby DickinsonDocument2 pagesRyan Ashby Dickinsonapi-347999772No ratings yet
- HXPM8XBBYY19065T2CDocument1 pageHXPM8XBBYY19065T2CЕвгений ГрязевNo ratings yet
- Comparative ratings of heavy duty cablesDocument1 pageComparative ratings of heavy duty cablesshivani76% (25)
- Anlage C DQC III-18 La DQC IV-18 LaDocument5 pagesAnlage C DQC III-18 La DQC IV-18 LaPEDRONo ratings yet
- UKPSC JE Civil 2024 Exam (Technical) - ScheduleDocument4 pagesUKPSC JE Civil 2024 Exam (Technical) - ScheduleIES-GATEWizNo ratings yet
- Manual Completo Sinovo SD600Document221 pagesManual Completo Sinovo SD600Felipe de PaulaNo ratings yet
- ST 30 PDFDocument2 pagesST 30 PDFafiffathin_akramNo ratings yet
- Distributed Tic-Tac-Toe: Requirements, Design & AnalysisDocument8 pagesDistributed Tic-Tac-Toe: Requirements, Design & AnalysisRitika AgnihotriNo ratings yet
- SPE 63041 Design and Installation of Sand Separation and Handling SystemDocument10 pagesSPE 63041 Design and Installation of Sand Separation and Handling Systemalexalek2000No ratings yet
- The Collector of Treasures - Long NotesDocument3 pagesThe Collector of Treasures - Long NotesAnimesh BhakatNo ratings yet
- Presentation MolesworthDocument13 pagesPresentation Molesworthapi-630754890No ratings yet
- Role of Digital Infrastructure in The Post Pandemic World: Preparing For Civil Services Interview-The Right PerspectiveDocument40 pagesRole of Digital Infrastructure in The Post Pandemic World: Preparing For Civil Services Interview-The Right PerspectiveshekhardfcNo ratings yet
- Chapter 8Document2 pagesChapter 8Riza Mae AlceNo ratings yet
- Full Download Agriscience Fundamentals and Applications 6th Edition Burton Solutions ManualDocument36 pagesFull Download Agriscience Fundamentals and Applications 6th Edition Burton Solutions ManualzickshannenukusNo ratings yet
- OSHCo Study I MalaysiaDocument7 pagesOSHCo Study I MalaysiafairusNo ratings yet