You might also like
- DC Chopper For Speed Control PPT Final (1) ..........................Document18 pagesDC Chopper For Speed Control PPT Final (1) ..........................fakhar zamanNo ratings yet
- DC Chopper For Speed Control PPT FinalDocument18 pagesDC Chopper For Speed Control PPT Finalfakhar zamanNo ratings yet
- For Quadrant DC Motor Control PDFDocument43 pagesFor Quadrant DC Motor Control PDFRohini YejareNo ratings yet
- Four Quadrant DC Motor Speed Control without MicrocontrollerDocument15 pagesFour Quadrant DC Motor Speed Control without MicrocontrollerPrasanna KSNo ratings yet
- For Quadrant DC Motor ControlDocument43 pagesFor Quadrant DC Motor ControlDarshanRupani100% (1)
- Solar Powered Speed Control of Brushless DC MotorDocument7 pagesSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsNo ratings yet
- Fuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorDocument5 pagesFuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorijtetjournalNo ratings yet
- Three-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWDocument26 pagesThree-Phase Squirrel-Cage Induction Motor Drive Analysis Using LabVIEWCarlos Roberto Amaya Rodriguez100% (1)
- DC Motor Speed Control Using PLCDocument9 pagesDC Motor Speed Control Using PLCT.JEMIMAPRICILLAHNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- DC Motor Speed and Direction Control Using Microprocessor 8085Document48 pagesDC Motor Speed and Direction Control Using Microprocessor 8085Bhavya Wadhwa100% (3)
- DC Motor ControlDocument7 pagesDC Motor ControlIanNo ratings yet
- Four Quadrant Speed Control of DC Motor Using ChopperDocument5 pagesFour Quadrant Speed Control of DC Motor Using ChopperismayilcNo ratings yet
- Project Report On Robotic ArmDocument28 pagesProject Report On Robotic Armpatel ketan84% (25)
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- 1 Field Oriented Control of Induction Motor 12/6/2015Document36 pages1 Field Oriented Control of Induction Motor 12/6/2015Belal Ashraf100% (1)
- Four Quadrant DC Motor Speed Control With MicrocontrollerDocument3 pagesFour Quadrant DC Motor Speed Control With MicrocontrollerLEAF servicesNo ratings yet
- New Synopsis DC MotorDocument5 pagesNew Synopsis DC MotorVishalNandanwarNo ratings yet
- Fyp ReportDocument46 pagesFyp ReportM Zeeshan KhawajaNo ratings yet
- IntroductionDocument3 pagesIntroductionaziz balochNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Term Paper On DC MotorDocument4 pagesTerm Paper On DC Motorc5qfb5v5100% (1)
- MSD Exp2Document5 pagesMSD Exp2ngolos247No ratings yet
- Microcontroller Based Stepper Motor Drive For Variable A.C Power SupplyDocument9 pagesMicrocontroller Based Stepper Motor Drive For Variable A.C Power SupplysanabelNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- 109ee0039 PDFDocument47 pages109ee0039 PDFrijilpoothadiNo ratings yet
- DC MotorDocument102 pagesDC MotorTestNo ratings yet
- A Study On DC Motor Operations and Speed Control Using MicrocontrollerDocument5 pagesA Study On DC Motor Operations and Speed Control Using MicrocontrollerabsalnabiNo ratings yet
- Assosa University: Collage of Engineering and Technology Department of Mechanical Mechatronics Assignment 1Document32 pagesAssosa University: Collage of Engineering and Technology Department of Mechanical Mechatronics Assignment 1Elijah T DhNo ratings yet
- 4.1 DC Motor SpecificationDocument6 pages4.1 DC Motor SpecificationAsgher KhattakNo ratings yet
- PMDC motor control using PWMDocument3 pagesPMDC motor control using PWMrituNo ratings yet
- PMDC Motor Control Using PWM Techniques: Ms. Dipti K. Shah Prof. B. T. DeshmukhDocument3 pagesPMDC Motor Control Using PWM Techniques: Ms. Dipti K. Shah Prof. B. T. Deshmukhritu rajNo ratings yet
- Brushless DC Motor Speed ControllerDocument6 pagesBrushless DC Motor Speed Controllerالامير حسنNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocument3 pagesSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelNo ratings yet
- Speed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)Document42 pagesSpeed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)rijilpoothadiNo ratings yet
- Design and Simulation of Speed Control of Three Phase Induction Motor Using Power Electronics ConverterDocument52 pagesDesign and Simulation of Speed Control of Three Phase Induction Motor Using Power Electronics Converterzelalem wegayehu100% (1)
- Variable Frequency DrivesDocument17 pagesVariable Frequency DrivesVinay Tarsem Lal100% (1)
- Design of A Hybrid Bicycle With Regenerative Braking Using BLDC MotorDocument3 pagesDesign of A Hybrid Bicycle With Regenerative Braking Using BLDC MotorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Induction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationDocument5 pagesInduction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationIJIRST100% (2)
- Four Quadrant DC Motor Control Without MicrocontrollerDocument2 pagesFour Quadrant DC Motor Control Without Microcontrollerjayonline_4uNo ratings yet
- Practical Features - KA/KAX: DC Powered Rotary Paddles Use Long-Life AC MotorDocument2 pagesPractical Features - KA/KAX: DC Powered Rotary Paddles Use Long-Life AC Motorجمال ابو الفضلNo ratings yet
- Applying AC drives in steel industriesDocument6 pagesApplying AC drives in steel industriessiddsunnyNo ratings yet
- Four Quadrant Speed Control of DC MotorDocument2 pagesFour Quadrant Speed Control of DC MotorRamsathayaNo ratings yet
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNo ratings yet
- Microcontroller Less Four Quadrant DC Motor ControlDocument3 pagesMicrocontroller Less Four Quadrant DC Motor ControlEmmanuel AgyemangNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Fabrication of Overhead CraneDocument45 pagesFabrication of Overhead CraneWORLD360No ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- Selection of Motor: 1. SPEED: in PIC IC The Execution of An Instruction Is Very Fast (In Micro Seconds) and Can BeDocument12 pagesSelection of Motor: 1. SPEED: in PIC IC The Execution of An Instruction Is Very Fast (In Micro Seconds) and Can Bebsirisha415No ratings yet
- Simulation & Modeling of BLDC MotorDocument20 pagesSimulation & Modeling of BLDC Motorsam clastineNo ratings yet
- Analogue Communications ReportDocument12 pagesAnalogue Communications ReportNitesh ChaurasiyaNo ratings yet
- Reasch PaperDocument8 pagesReasch PaperRajveerNo ratings yet
- Lab 910Document20 pagesLab 910Malak Al-AshiNo ratings yet
- Dual ConverterDocument11 pagesDual ConverterRoshan GokheNo ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- cs231n 2017 Lecture2Document61 pagescs231n 2017 Lecture2fatalist3No ratings yet
- When You Read About Surge Arrestor - Try To Recall Where You Saw Such A ThingDocument2 pagesWhen You Read About Surge Arrestor - Try To Recall Where You Saw Such A ThingAnik GoyalNo ratings yet
- Lecture 1Document4 pagesLecture 1Anik GoyalNo ratings yet
- Anik Goyal: Work ExperienceDocument1 pageAnik Goyal: Work ExperienceAnik GoyalNo ratings yet
- 5 E6 B7 D 01Document2 pages5 E6 B7 D 01Kaushik Vasava100% (1)
- Power Electronics Made EasyDocument220 pagesPower Electronics Made EasyAnik Goyal100% (1)
- Limitations KCL and KVLDocument1 pageLimitations KCL and KVLAnik GoyalNo ratings yet
- When You Read About Surge Arrestor - Try To Recall Where You Saw Such A ThingDocument2 pagesWhen You Read About Surge Arrestor - Try To Recall Where You Saw Such A ThingAnik GoyalNo ratings yet
- Ongc RecruitmentDocument7 pagesOngc RecruitmentNDTV67% (3)
- Matrimonial BiodataDocument1 pageMatrimonial BiodataAnik GoyalNo ratings yet
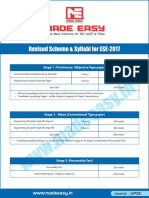
- UPSC ESE 2017 SYllabiDocument4 pagesUPSC ESE 2017 SYllabiKarthiik88No ratings yet
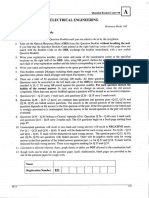
- Electrical EngineeringDocument2 pagesElectrical EngineeringSantosh SandyNo ratings yet
- BSNL DR JE Merit List for AP & A&N CirclesDocument45 pagesBSNL DR JE Merit List for AP & A&N CirclesAmol Kore-MaliNo ratings yet
- Presentation UPPTCL 400KV Substation Motiram Adda, GorakhpurDocument23 pagesPresentation UPPTCL 400KV Substation Motiram Adda, GorakhpurAnik Goyal50% (6)
- Taguchi MethodDocument26 pagesTaguchi Methodapi-383593450% (2)
- Gate Ee 2011 With Answer Key PDFDocument19 pagesGate Ee 2011 With Answer Key PDFAnik GoyalNo ratings yet
- Quality ManagementDocument45 pagesQuality ManagementAnik GoyalNo ratings yet
- Q: What Is Taguchi Loss Function? The ConceptDocument5 pagesQ: What Is Taguchi Loss Function? The ConceptAnik GoyalNo ratings yet
- EE-GATE16 - Syllabus Gate ForumDocument4 pagesEE-GATE16 - Syllabus Gate ForumAnik GoyalNo ratings yet
- 12V To 220V Inverter CircuitDocument1 page12V To 220V Inverter CircuitAnik GoyalNo ratings yet
- Infinite Bus ConceptDocument1 pageInfinite Bus ConceptAnik GoyalNo ratings yet
- AnniverseryDocument4 pagesAnniverseryAnik GoyalNo ratings yet
- Electrical EngineeringDocument2 pagesElectrical EngineeringSantosh SandyNo ratings yet
- Ek Ladki Ko Dekha To Asa LagaDocument1 pageEk Ladki Ko Dekha To Asa LagaAnik GoyalNo ratings yet
- D6RDocument27 pagesD6RMbahdiro KolenxNo ratings yet
- ABB ATS DatasheetDocument4 pagesABB ATS DatasheetGBC MICEINo ratings yet
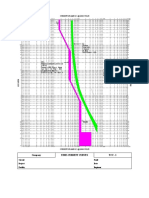
- Powerplot Job - PDFDocument1 pagePowerplot Job - PDFelmer18No ratings yet
- Meiden VT230S ManualDocument217 pagesMeiden VT230S Manualcocodrilo360No ratings yet
- United States Patent: Jung Et AlDocument14 pagesUnited States Patent: Jung Et AlYuseuk JungNo ratings yet
- Benshaw RDB6 Series Instruction Manual (Old Starter)Document56 pagesBenshaw RDB6 Series Instruction Manual (Old Starter)TYLER PRICENo ratings yet
- Ele. Supply Boq For Taqa NeyveliDocument1 pageEle. Supply Boq For Taqa NeyvelitechbhaskarNo ratings yet
- Pitch Angle Control of Wind Energy Conversion SystemDocument10 pagesPitch Angle Control of Wind Energy Conversion SystemSatyajit DasNo ratings yet
- Service Documentation: Market Release 5/93Document5 pagesService Documentation: Market Release 5/93Eprom ServisNo ratings yet
- Optimal Dispatch of Generation: Prepared To Dr. Emaad SedeekDocument7 pagesOptimal Dispatch of Generation: Prepared To Dr. Emaad SedeekAhmedRaafatNo ratings yet
- National Oil Corporation: Rev Date Description Checked ApprovedDocument46 pagesNational Oil Corporation: Rev Date Description Checked ApprovedYousab JacobNo ratings yet
- Power Meter: For Single-Phase & Split-Phase Mains NetworksDocument2 pagesPower Meter: For Single-Phase & Split-Phase Mains NetworksHitesh PanigrahiNo ratings yet
- Final ResearchDocument22 pagesFinal ResearchCobid MaritesNo ratings yet
- Hoja Tecnica Control de NivelDocument3 pagesHoja Tecnica Control de NivelpawerxlNo ratings yet
- 02 - ContactorsDocument70 pages02 - ContactorsPac CoolNo ratings yet
- Project Report On Power Transformer RepairDocument8 pagesProject Report On Power Transformer RepairEIRI Board of Consultants and Publishers100% (1)
- Siemens Hydrogen-Cooled Generators With Water-Cooled Stator WindingsDocument3 pagesSiemens Hydrogen-Cooled Generators With Water-Cooled Stator WindingsPradeep_VashistNo ratings yet
- 430 ZXM6-NH156 158.75 - 420-445W - 35×35 - 20200623 - E - 350mmcable - 430Document2 pages430 ZXM6-NH156 158.75 - 420-445W - 35×35 - 20200623 - E - 350mmcable - 430steven6diaz-2No ratings yet
- Doosan DX140LC, DX180LC Electrical Wiring DiagramsDocument129 pagesDoosan DX140LC, DX180LC Electrical Wiring DiagramsEngAbdelrahman Khames100% (3)
- ESA5011Document1 pageESA5011kamal_khan85No ratings yet
- Datasheet 587962 (80-6360-A0) en 120V 60HzDocument4 pagesDatasheet 587962 (80-6360-A0) en 120V 60HzBenja TCNo ratings yet
- Experiment 109Document1 pageExperiment 109anon_203304572No ratings yet
- NetSure701 Rectifier Shelf SpecificationsDocument41 pagesNetSure701 Rectifier Shelf Specificationsronychaves100% (1)
- Roger Andrews Pat 3783550Document6 pagesRoger Andrews Pat 3783550amalaa100% (2)
- Sample - Solution Power Electronics Original Daniel HartDocument8 pagesSample - Solution Power Electronics Original Daniel HartAdel HabibiNo ratings yet
- Hanwha Q CELLS Data Sheet QPOWER L-G5 315-335 CN-LAA-IND 2017-06 Rev04 E PDFDocument2 pagesHanwha Q CELLS Data Sheet QPOWER L-G5 315-335 CN-LAA-IND 2017-06 Rev04 E PDFNahla ElaminNo ratings yet
- G.A.L. Manufacturing Encoderless Closed Loop Door Operator Q&ADocument2 pagesG.A.L. Manufacturing Encoderless Closed Loop Door Operator Q&APabloNo ratings yet
- Electrical Partsof Wind TurbinesDocument62 pagesElectrical Partsof Wind TurbinessatishnamalaNo ratings yet
- Salient and Non Salient Pole GeneratorsDocument7 pagesSalient and Non Salient Pole Generatorsharshil mangeNo ratings yet
- Siaran Khas 3 (Msia) Feb 2022Document28 pagesSiaran Khas 3 (Msia) Feb 2022NadiaNo ratings yet