You might also like
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- T2208 Topp Pro-TDocument26 pagesT2208 Topp Pro-TGonzalo Rojo AchaNo ratings yet
- Us 14 Oh Reverse Engineering Flash Memory For Fun and Benefit WP PDFDocument35 pagesUs 14 Oh Reverse Engineering Flash Memory For Fun and Benefit WP PDFFrancisco AlvesNo ratings yet
- High Speed Micromouse Servo Controller Based On DSP and FpgaDocument8 pagesHigh Speed Micromouse Servo Controller Based On DSP and FpgaNilotpal SinhaNo ratings yet
- 16-channel digital mixer with FX and DSPDocument52 pages16-channel digital mixer with FX and DSPacuauculturaNo ratings yet
- Digital I/O Expansion Board: FeaturesDocument4 pagesDigital I/O Expansion Board: FeaturesfcordNo ratings yet
- DescripcionMotor Brush DCDocument4 pagesDescripcionMotor Brush DCJesus RodriguezNo ratings yet
- 18 Volt String Trimmer/Edger: P2008 P2008VNM 107268001 107268101Document4 pages18 Volt String Trimmer/Edger: P2008 P2008VNM 107268001 107268101kfpkqcvpy5No ratings yet
- LAB 3: I/O I - 7-S D: Nterfacing EG IsplaysDocument4 pagesLAB 3: I/O I - 7-S D: Nterfacing EG IsplaysAhmed SajidNo ratings yet
- JARM7 LPC 2148 Manual BoardDocument5 pagesJARM7 LPC 2148 Manual BoardPeeyush KpNo ratings yet
- PIC PWM ControllerDocument10 pagesPIC PWM Controllerkeitabando100% (2)
- EEPROMSDocument18 pagesEEPROMSalejandrodmsosaNo ratings yet
- 16 Mic Preamp Mixer ManualDocument52 pages16 Mic Preamp Mixer ManualManuel MojarroNo ratings yet
- MIL-111443-Brochure DiversionDocument8 pagesMIL-111443-Brochure DiversionCésar David Pedroza DíazNo ratings yet
- PC 400 Mando Final Travel Motor 1Document2 pagesPC 400 Mando Final Travel Motor 1victor carvalloNo ratings yet
- WF32 ™ Board Reference Manual: Revised June 29, 2017 This Manual Applies To The WF32 Rev. CDocument24 pagesWF32 ™ Board Reference Manual: Revised June 29, 2017 This Manual Applies To The WF32 Rev. CGeneva Joyce TorresNo ratings yet
- QLdsPIC3 User's ManualDocument43 pagesQLdsPIC3 User's ManualJohnny Romero MiliánNo ratings yet
- Mainboard p4845glmDocument34 pagesMainboard p4845glmHo Thanh BinhNo ratings yet
- Scientific Career of Dr. Jaime Lagunez OteroDocument42 pagesScientific Career of Dr. Jaime Lagunez OteroFrente CivicoNo ratings yet
- ACT3: TIMERS AND DELAYS MICROCONTROLLERSDocument25 pagesACT3: TIMERS AND DELAYS MICROCONTROLLERSLaritza Marquez CristanchoNo ratings yet
- Prof. M.SHILPA Assistant Professor Dept. of ISE, BITDocument39 pagesProf. M.SHILPA Assistant Professor Dept. of ISE, BITAditya AryanNo ratings yet
- s7_300sm322_5gh_76Document9 pagess7_300sm322_5gh_76mahmoodalmotamize1No ratings yet
- LIVE16XL Manual PDFDocument28 pagesLIVE16XL Manual PDFRodrigo Coñuepan MachucaNo ratings yet
- Interfacing I2C-EEPROM With LPC2148: Arm How-To GuideDocument20 pagesInterfacing I2C-EEPROM With LPC2148: Arm How-To GuideShiva SagarNo ratings yet
- DM9051 Product Brief Ver 0.2 - 021814Document4 pagesDM9051 Product Brief Ver 0.2 - 021814wwNo ratings yet
- Sweeper ManualDocument10 pagesSweeper ManualpecirepiNo ratings yet
- Sipeed Maixbit Datasheet V2.0: Key FeaturesDocument6 pagesSipeed Maixbit Datasheet V2.0: Key FeaturesVlad TimisoaraNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Document23 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Tomás BurónNo ratings yet
- Laser Printer Parts Reference ListDocument10 pagesLaser Printer Parts Reference ListarieessNo ratings yet
- Network Control Unit BoardDocument34 pagesNetwork Control Unit BoardVineet Jain VaktawatNo ratings yet
- FDR AnalogDocument13 pagesFDR AnalogSree VBroNo ratings yet
- Example 2: U Hvac D F: Load Calculation: Manual J Abridged Edition Equipment Selection: Heat PumpDocument8 pagesExample 2: U Hvac D F: Load Calculation: Manual J Abridged Edition Equipment Selection: Heat PumpAngel CarvajalNo ratings yet
- Avr ISP SimpleDocument1 pageAvr ISP SimplekunalkundanamNo ratings yet
- Temp Sensor LM35 Interfacing With ARM7 TyroDocument12 pagesTemp Sensor LM35 Interfacing With ARM7 TyroÉderson BertiNo ratings yet
- Uniwill L50ii0 - 37GL50200-C0 - Rev C - Cce NVC-C5H6F PDFDocument33 pagesUniwill L50ii0 - 37GL50200-C0 - Rev C - Cce NVC-C5H6F PDFCamilo Rodriguez NiñoNo ratings yet
- 2CDC135001D0207Document158 pages2CDC135001D0207lucassilvapidNo ratings yet
- ECS Laptop DreamPro I38ii1 MB RC 1207bDocument37 pagesECS Laptop DreamPro I38ii1 MB RC 1207bJomy GeorgeNo ratings yet
- Example Project - Zigbot - Zigbee Controlled RobotDocument30 pagesExample Project - Zigbot - Zigbee Controlled RobotAlbin JosephNo ratings yet
- This Simple, Low-Cost ADC Comprises A 12-Bit SAR ADC, Which Attaches To The Serial Port of The PC Through The RTS, CTS, and DTR LinesDocument1 pageThis Simple, Low-Cost ADC Comprises A 12-Bit SAR ADC, Which Attaches To The Serial Port of The PC Through The RTS, CTS, and DTR LinesVikas KushwahaNo ratings yet
- Microcontroller - 3Document21 pagesMicrocontroller - 3Elisée NdjabuNo ratings yet
- QM - Xc7A35T - Ddr3 Core Board: User ManualDocument13 pagesQM - Xc7A35T - Ddr3 Core Board: User ManualNgoc AnhNo ratings yet
- Catalyst 3560Document36 pagesCatalyst 3560Thiago BoninNo ratings yet
- Huawei S7 Schematic PDFDocument47 pagesHuawei S7 Schematic PDFCarlos RubioNo ratings yet
- M300 RTK Quick Start Guide 0515 PDFDocument109 pagesM300 RTK Quick Start Guide 0515 PDFEduardoAbarcaNo ratings yet
- Assembly 1: Scanner Assembly: Service ManualDocument9 pagesAssembly 1: Scanner Assembly: Service ManualvictorplugaruNo ratings yet
- رــــهزلأا ةعماج - ةزـــــــــغ Al Azhar University - GazaDocument14 pagesرــــهزلأا ةعماج - ةزـــــــــغ Al Azhar University - Gazamohammed ahmedNo ratings yet
- Networking Manual Ga 5dxsl RHDocument66 pagesNetworking Manual Ga 5dxsl RHBambang IrawanNo ratings yet
- tms374 Ecu Decoder User Manual Obd2express PDFDocument10 pagestms374 Ecu Decoder User Manual Obd2express PDFEvgeniy FELiSNo ratings yet
- Tms374 Ecu Decoder Manual PDFDocument10 pagesTms374 Ecu Decoder Manual PDFOcta DosNo ratings yet
- tms374 Ecu Decoder User ManualDocument10 pagestms374 Ecu Decoder User ManualJorge FrançaNo ratings yet
- Parts CatalogDocument73 pagesParts CatalogBernardoNo ratings yet
- TMS-374 ECU DECODER SWEEPER GUIDEDocument10 pagesTMS-374 ECU DECODER SWEEPER GUIDEDario GulinoNo ratings yet
- XO-1 Schematics PDFDocument25 pagesXO-1 Schematics PDFshibilvNo ratings yet
- ASUS N73SV Rev1.0 Schematic DiagramDocument95 pagesASUS N73SV Rev1.0 Schematic DiagramKukla LossNo ratings yet
- Previous Screen: Generator Set C4.4 Generator Set S1M C4.4 Marine Gen Set S1M00001-UPDocument3 pagesPrevious Screen: Generator Set C4.4 Generator Set S1M C4.4 Marine Gen Set S1M00001-UPPaulvi MankouNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 7Document33 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 7Tomás BurónNo ratings yet
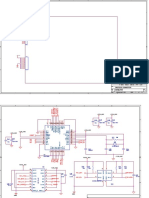
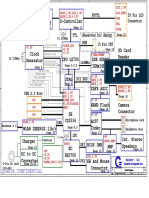
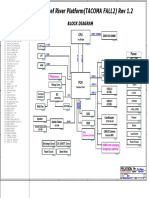
- B34 B34Y Chief River PlatformTACOMA FALL2 Rev 1.2Document71 pagesB34 B34Y Chief River PlatformTACOMA FALL2 Rev 1.2Abel MartinezkyNo ratings yet
- Functional Block Diagram ExplainedDocument4 pagesFunctional Block Diagram ExplainedhelloitspradeepNo ratings yet
- A Thermoregulation Model To Detect Diabetic Peripheral NeuropathyDocument4 pagesA Thermoregulation Model To Detect Diabetic Peripheral NeuropathyDilip KenNo ratings yet
- Automatic Detection of Diabetic Foot Complications With Infrared Thermography by Asymmetric AnalysisDocument11 pagesAutomatic Detection of Diabetic Foot Complications With Infrared Thermography by Asymmetric AnalysisDilip KenNo ratings yet
- Diabetes & MetabolismDocument6 pagesDiabetes & MetabolismDilip KenNo ratings yet
- Medical Thermography: A Diagnostic Approach For Type 2 Diabetes Based On Non-Contact Infrared Thermal ImagingDocument9 pagesMedical Thermography: A Diagnostic Approach For Type 2 Diabetes Based On Non-Contact Infrared Thermal ImagingDilip KenNo ratings yet
- The Application of Thermal Image Analysis To Diabetic Foot DiagnosisDocument7 pagesThe Application of Thermal Image Analysis To Diabetic Foot DiagnosisDilip KenNo ratings yet
- L4 - Simple I - O ControlDocument9 pagesL4 - Simple I - O ControlDilip KenNo ratings yet
- Digital Electronics 1 QPDocument12 pagesDigital Electronics 1 QPkhalil rehmanNo ratings yet
- Developing Counter and Time Delay RoutineDocument24 pagesDeveloping Counter and Time Delay RoutineDilip KenNo ratings yet
- Electric Field Direction and UniformityDocument11 pagesElectric Field Direction and UniformityDilip KenNo ratings yet
- Electric Field Direction and UniformityDocument11 pagesElectric Field Direction and UniformityDilip KenNo ratings yet
- Chapter 4Document21 pagesChapter 4Buddhika DasanayakeNo ratings yet
- 2015 Paper 2 Specimen PaperDocument16 pages2015 Paper 2 Specimen PaperDonnaNo ratings yet
- EarthDocument1 pageEarthDilip KenNo ratings yet
- 2015 Paper 1 Specimen Paper PDFDocument14 pages2015 Paper 1 Specimen Paper PDFTahpehs PhiriNo ratings yet
- Digital Electronics 1 QPDocument12 pagesDigital Electronics 1 QPkhalil rehmanNo ratings yet
- 2015 Paper 1 Specimen Paper PDFDocument14 pages2015 Paper 1 Specimen Paper PDFTahpehs PhiriNo ratings yet
- Terex RT 665 Tabla de CapacidadDocument8 pagesTerex RT 665 Tabla de CapacidadFabian AyalaNo ratings yet
- Information Technology For Sports ManagementDocument7 pagesInformation Technology For Sports ManagementJoseph Bernard MarceloNo ratings yet
- Second Semester - Final Exam - Google FormsDocument11 pagesSecond Semester - Final Exam - Google FormsAriel LumactodNo ratings yet
- MT6750 Android FdfdatterDocument10 pagesMT6750 Android FdfdatterCuentaNo ratings yet
- Absorption Refrigeration UnitDocument20 pagesAbsorption Refrigeration UnitAlyan YousafNo ratings yet
- Intelligent Functional Testing: White PaperDocument9 pagesIntelligent Functional Testing: White PaperSahodara reddyNo ratings yet
- GUIDELINES For Refund of Exam Fee CSCDocument5 pagesGUIDELINES For Refund of Exam Fee CSCChristine Joy VallejosNo ratings yet
- Industry 4.0: Reshaping the Manufacturing LandscapeDocument20 pagesIndustry 4.0: Reshaping the Manufacturing Landscapeambika1969inNo ratings yet
- Lean and green manufacturing for maximum productivityDocument4 pagesLean and green manufacturing for maximum productivitySherjanNo ratings yet
- Subsynchronous Resonance and FACTS-Novel Control Strategy For Its MitigationDocument15 pagesSubsynchronous Resonance and FACTS-Novel Control Strategy For Its Mitigationantoniolml10No ratings yet
- Public Speaking-RevolveDocument11 pagesPublic Speaking-RevolveRoshadé's TvNo ratings yet
- Asssignment Content Head by Siddhartha DattaDocument8 pagesAsssignment Content Head by Siddhartha DattaSiddharth DattaNo ratings yet
- Auto Tune Live User Guide v01Document27 pagesAuto Tune Live User Guide v01AnthonyNo ratings yet
- © Jitesh Khurkhuriya - Azure ML Online CourseDocument27 pages© Jitesh Khurkhuriya - Azure ML Online Coursedhrit_wNo ratings yet
- Hammer PyDocument4 pagesHammer Pychim chanoudomNo ratings yet
- Three-Phase Synchronous Generator AVR WT-2: VOLT - Potentiometer For Adjusting The OutputDocument3 pagesThree-Phase Synchronous Generator AVR WT-2: VOLT - Potentiometer For Adjusting The OutputBradNo ratings yet
- BUS 5560 Economic Evaluations in Healthcare John Catalano Spring I 2023Document11 pagesBUS 5560 Economic Evaluations in Healthcare John Catalano Spring I 2023Essay WritingNo ratings yet
- Machine Learning in Healthcare Management For Medical Insurance Cost PredictionDocument11 pagesMachine Learning in Healthcare Management For Medical Insurance Cost PredictionKumara SNo ratings yet
- M-17211-2 Avio FAST Method Guide - Syngistix - ESIDocument16 pagesM-17211-2 Avio FAST Method Guide - Syngistix - ESIta quang khanhNo ratings yet
- Chatgptplus 5Document6 pagesChatgptplus 5Henriette Russo LuizNo ratings yet
- Inst AMI Deltacon Power v.4.12 EngDocument92 pagesInst AMI Deltacon Power v.4.12 EngMaxi MaxiNo ratings yet
- MBA Research Project GuidelinesDocument7 pagesMBA Research Project GuidelinesAnsari WarisNo ratings yet
- LT Panel PDI SOPDocument4 pagesLT Panel PDI SOPShrikanth Sola100% (2)
- Service KitDocument2 pagesService Kiteshopmanual limaNo ratings yet
- Calculating transformer loss cost ratesDocument3 pagesCalculating transformer loss cost ratesRatana KemNo ratings yet
- SAMMIE SMITH - Adobe Photoshop 2024 Beginners To Expert Guide - 2023Document378 pagesSAMMIE SMITH - Adobe Photoshop 2024 Beginners To Expert Guide - 2023arcitecNo ratings yet
- LC320WX3 SLC1 LGDocument28 pagesLC320WX3 SLC1 LGCheque Serv CauichNo ratings yet
- Pinguely - Haulotte: H21T H21TXDocument147 pagesPinguely - Haulotte: H21T H21TXLidia Popa100% (1)
- ETW2001 A2 InstructionDocument5 pagesETW2001 A2 InstructionJanice NgNo ratings yet
- Simple Phenomena of Magnetism 1 MSDocument4 pagesSimple Phenomena of Magnetism 1 MSnssNo ratings yet