You might also like
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNo ratings yet
- GPS AssignmentDocument8 pagesGPS AssignmentChristine M M Mariwo100% (1)
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisNo ratings yet
- What Is GPS?Document40 pagesWhat Is GPS?vigneshNo ratings yet
- In - Photogrammetry and GpsDocument18 pagesIn - Photogrammetry and Gpsnavneethan gnNo ratings yet
- GPS SurveyingDocument5 pagesGPS SurveyingLords BotzNo ratings yet
- Global Positioning System: Paper Presentation OnDocument10 pagesGlobal Positioning System: Paper Presentation OnSravan Kumar100% (1)
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: AbstractGanesh VenkatesanNo ratings yet
- How GPS System Works in 40 CharactersDocument4 pagesHow GPS System Works in 40 CharactersKaveesh SNo ratings yet
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: Abstractasjad12No ratings yet
- GPS 1Document4 pagesGPS 1Aman AroraNo ratings yet
- 1.1 What Is GPS?: A. Space SegmentDocument11 pages1.1 What Is GPS?: A. Space SegmentReiger RoyalNo ratings yet
- ECB 2243-06-GPS-NezaDocument39 pagesECB 2243-06-GPS-NezalathavikneswariNo ratings yet
- Please Explain How GPS System Work. Explainin Term of TrilaterationDocument6 pagesPlease Explain How GPS System Work. Explainin Term of TrilaterationMohammad Fajri Raazaq RamadhanNo ratings yet
- Final Edited Gps PptsDocument29 pagesFinal Edited Gps PptsAakanksha GaurNo ratings yet
- Global Positioning System (GPS)Document13 pagesGlobal Positioning System (GPS)ratheeshbrNo ratings yet
- GPS Presentation PDFDocument12 pagesGPS Presentation PDFDee CeeNo ratings yet
- Global Positioning System & Geographical Information System: BY: Dr. Thomas MathewDocument42 pagesGlobal Positioning System & Geographical Information System: BY: Dr. Thomas MathewSHIVAM BHATTACHARYANo ratings yet
- CHAPTER-5 Introduction To GPS SurveyingDocument40 pagesCHAPTER-5 Introduction To GPS Surveyingaduyekirkosu1scribdNo ratings yet
- Global Positining System: Working, Errors and Correction Using DgpsDocument18 pagesGlobal Positining System: Working, Errors and Correction Using Dgpsbalu54No ratings yet
- Hyperboloid MultilaterationDocument6 pagesHyperboloid MultilaterationHazel CordanoNo ratings yet
- Water Quality: Precision Agriculture: Global Positioning System (GPS)Document6 pagesWater Quality: Precision Agriculture: Global Positioning System (GPS)smbachbgweNo ratings yet
- GPS System: Three Components of The GPSDocument6 pagesGPS System: Three Components of The GPSAnonymous JEzHIEUNNo ratings yet
- 3 GPS FundamentalsDocument8 pages3 GPS FundamentalsrajaanwarNo ratings yet
- A Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Document21 pagesA Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Ramakrishna RajuNo ratings yet
- Navaids - RafsanDocument66 pagesNavaids - Rafsanparvezscribd2829No ratings yet
- Land Measurement ScienceDocument7 pagesLand Measurement Sciencealinaitwe shalifuNo ratings yet
- GPS TechnologyDocument8 pagesGPS TechnologyKunnam Hanuma ReddyNo ratings yet
- GPS ReportDocument13 pagesGPS Reportavinashjha99No ratings yet
- GPS in The Topography: The System Consists of Three ComponentsDocument3 pagesGPS in The Topography: The System Consists of Three ComponentsCEFACUNDOSNo ratings yet
- What Is GPSDocument7 pagesWhat Is GPSJay MehtaNo ratings yet
- Global Positioning SystemDocument10 pagesGlobal Positioning SystemAnkit GuptaNo ratings yet
- Gps Lecture NotesDocument101 pagesGps Lecture NotesRocking ChakravarthyNo ratings yet
- Global Positioning SystemDocument19 pagesGlobal Positioning SystemBlack's ContinentNo ratings yet
- GPS Notes PDFDocument13 pagesGPS Notes PDFAlok100% (1)
- GPS SystemDocument11 pagesGPS SystemAHMED SOHELNo ratings yet
- Differential GPS ExplainedDocument5 pagesDifferential GPS Explained87291472BG100% (2)
- Satellite-Based PositioningDocument11 pagesSatellite-Based Positioningarchana palNo ratings yet
- Global Positioning System PDFDocument66 pagesGlobal Positioning System PDFRupesh PandeyNo ratings yet
- Satellite Navigation & The Global Positioning System: Figure 1: GPS Block II-F SatelliteDocument26 pagesSatellite Navigation & The Global Positioning System: Figure 1: GPS Block II-F SatelliteHarini Vemula100% (1)
- Global Positioning SystemDocument4 pagesGlobal Positioning SystemErika ParadelaNo ratings yet
- Global Positioning SystemDocument6 pagesGlobal Positioning SystemAlyssa Alexis RamosNo ratings yet
- An Introduction To GNSSDocument99 pagesAn Introduction To GNSSjustine john acabal100% (1)
- Notes On Satellite Navigation System-1Document11 pagesNotes On Satellite Navigation System-1Md Monir HossainNo ratings yet
- Using GPS for accurate GIS data captureDocument13 pagesUsing GPS for accurate GIS data capturehiwot ytayewNo ratings yet
- GSM GPRS Based TrackerDocument29 pagesGSM GPRS Based TrackerAitzaz HussainNo ratings yet
- Gps (Global Positioning System) : Prof. A. JabeenaDocument40 pagesGps (Global Positioning System) : Prof. A. JabeenaAryan VermaNo ratings yet
- What Is GpsDocument5 pagesWhat Is Gpsjennifer cuatrizNo ratings yet
- Bhawani Shankar Cead Semester IV-SS2019Document30 pagesBhawani Shankar Cead Semester IV-SS2019sangey111No ratings yet
- Sattelite Communications (6) (1) - 150-166Document17 pagesSattelite Communications (6) (1) - 150-166ks.umashankerNo ratings yet
- Classification of Location Based Services-FINALDocument11 pagesClassification of Location Based Services-FINALBaiju JkdNo ratings yet
- Principle of Functioning of DGPS & ETSDocument64 pagesPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- Basics of GPSDocument23 pagesBasics of GPSMuhammad Aqib ud dinNo ratings yet
- DGPS Explained: How Differential Correction Improves GPS AccuracyDocument5 pagesDGPS Explained: How Differential Correction Improves GPS AccuracyGanga BasinNo ratings yet
- Global Positioning System: Introduction ToDocument58 pagesGlobal Positioning System: Introduction ToYasir Malik0% (1)
- GpsDocument12 pagesGpslisha MNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- How To Pick The Perfect Portable GPS Unit: A Guide To Stress Free TravelFrom EverandHow To Pick The Perfect Portable GPS Unit: A Guide To Stress Free TravelNo ratings yet
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Duraturn TBR 2021Document28 pagesDuraturn TBR 2021IgorNo ratings yet
- Gearbox Clutch Driveshaft Steering PDFDocument190 pagesGearbox Clutch Driveshaft Steering PDFluisxxx1100% (1)
- Build Your Own Car That Gets 100 Miles Per Gallon: Subscribe (/cta-Sub-Landing)Document11 pagesBuild Your Own Car That Gets 100 Miles Per Gallon: Subscribe (/cta-Sub-Landing)mraNo ratings yet
- Hyundai Venue-N-Line-BrochureDocument10 pagesHyundai Venue-N-Line-BrochureRasakNo ratings yet
- Taller - Benelli - Tornado - 899TREKDocument352 pagesTaller - Benelli - Tornado - 899TREKManuelmpg MotosNo ratings yet
- TM 22397 (TMXInstallationManual)Document9 pagesTM 22397 (TMXInstallationManual)Jeremiah WalkerNo ratings yet
- Installation Manual - MC1101S-R56Document12 pagesInstallation Manual - MC1101S-R56Jhun AquinoNo ratings yet
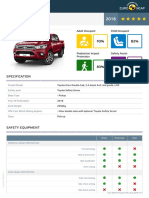
- Euroncap Toyota Hilux Toyota Hilux DatasheetDocument12 pagesEuroncap Toyota Hilux Toyota Hilux DatasheetTransportes Borges e ServiçosNo ratings yet
- SL-Air-spring axles overview and specificationsDocument38 pagesSL-Air-spring axles overview and specificationsCem DufourNo ratings yet
- Market Situation & Strategy SolutionsDocument32 pagesMarket Situation & Strategy SolutionsРинат Сагидов100% (3)
- Understanding Scale and Proportion in Maps and DrawingsDocument14 pagesUnderstanding Scale and Proportion in Maps and DrawingsZeke Isaiah Wijaya 2052028No ratings yet
- 2008 Ford Escape BrochureDocument14 pages2008 Ford Escape BrochureRobert ParkerNo ratings yet
- Hangcha cpcd3035Document103 pagesHangcha cpcd3035Дмитрий БреславецNo ratings yet
- Esc-Ecomat Service Check: Key To DrawingDocument2 pagesEsc-Ecomat Service Check: Key To DrawingЛеонид БеркоNo ratings yet
- All Damos Are Available in English and German MG1Document32 pagesAll Damos Are Available in English and German MG1Виктор БанераNo ratings yet
- WM 113 Manual Hydraulic DiagramDocument5 pagesWM 113 Manual Hydraulic DiagramCarlos FigueredoNo ratings yet
- Types of Vehicle LayoutDocument7 pagesTypes of Vehicle LayoutAnk VaaiNo ratings yet
- Isuzu-REDTech-6U-Lit-Sheet Motor de La LB 460Document2 pagesIsuzu-REDTech-6U-Lit-Sheet Motor de La LB 460Diego martinez castellanosNo ratings yet
- DKV Box Europe Obu Usermanual Eng 20210324Document53 pagesDKV Box Europe Obu Usermanual Eng 20210324Marko JeličićNo ratings yet
- Wba4g11020d667594 Vehicle InformationDocument2 pagesWba4g11020d667594 Vehicle InformationБогдан Милица КанкарашNo ratings yet
- Ta-249813-023 - C - P&id - Caustic Injection PacakgeDocument1 pageTa-249813-023 - C - P&id - Caustic Injection Pacakgerizwan.zamanNo ratings yet
- A Defren CityCat 5000Document76 pagesA Defren CityCat 5000Dino Kock100% (2)
- 1989 Nissan Sentra 1.6L Automatic Manual Transmission OverhaulDocument29 pages1989 Nissan Sentra 1.6L Automatic Manual Transmission OverhaulRubenNo ratings yet
- JLG Manual de AccesoriosDocument116 pagesJLG Manual de AccesoriosmanuelNo ratings yet
- Hyundai R330LC-9S Manual PDFDocument651 pagesHyundai R330LC-9S Manual PDFDmitriy100% (2)
- Nominal Compression PressureDocument2 pagesNominal Compression Pressuremohanrajjercy71No ratings yet
- ITA Side Shift Spec SheetDocument8 pagesITA Side Shift Spec SheetSean CarvalhoNo ratings yet
- Pricelist 032607Document4 pagesPricelist 032607HandokoNo ratings yet
- DX 57w 7 en (6da)Document12 pagesDX 57w 7 en (6da)cik cikNo ratings yet
- Inspection Report For NarmulDocument3 pagesInspection Report For NarmulmelakuNo ratings yet