You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Denaturation of Protein by Chlorine Dioxide: Oxidative Modification of Tryptophan and Tyrosine ResiduesDocument14 pagesDenaturation of Protein by Chlorine Dioxide: Oxidative Modification of Tryptophan and Tyrosine ResiduesNathalia LedesmaNo ratings yet
- PLand FOLDocument10 pagesPLand FOLSayak ChattopadhyayNo ratings yet
- Scan Converting CircleDocument24 pagesScan Converting CircleAnikNo ratings yet
- Group B - EXP1 - Material Balance On Non-Reactive ProcessesDocument3 pagesGroup B - EXP1 - Material Balance On Non-Reactive Processesshy salvadorNo ratings yet
- Mouldings Plugins ManualDocument28 pagesMouldings Plugins ManualPaolo MarcuccettiNo ratings yet
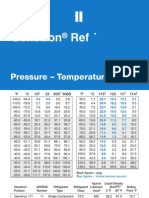
- Honeywell Refrigerants Pressure Pemperature Chart1Document2 pagesHoneywell Refrigerants Pressure Pemperature Chart1Toni TalevskiNo ratings yet
- ExCos-P enDocument5 pagesExCos-P enNavid EbrahimniaNo ratings yet
- Shaft GroundingDocument7 pagesShaft GroundingDan Alin MirceaNo ratings yet
- Sudt Accessport Advanced Terminal / Monitor / Debugger Version 1.37 User ManualDocument53 pagesSudt Accessport Advanced Terminal / Monitor / Debugger Version 1.37 User ManualbtrsasNo ratings yet
- IDOCDocument19 pagesIDOCPedamallu SrinivasNo ratings yet
- SAIC-L-2002 Rev 6Document13 pagesSAIC-L-2002 Rev 6biplabpal2009No ratings yet
- Design and Implementation of A SHARC Digital Signal Processor Core in Verilog HDLDocument6 pagesDesign and Implementation of A SHARC Digital Signal Processor Core in Verilog HDLAhmed HamoudaNo ratings yet
- Automatic Video Surveillance System For Pedestrian Crossing Using Digital Image ProcessingDocument7 pagesAutomatic Video Surveillance System For Pedestrian Crossing Using Digital Image ProcessingNeha SinhaNo ratings yet
- GE Mark VDocument3 pagesGE Mark Vsmart_eng2009100% (1)
- Byte 1979 PDFDocument236 pagesByte 1979 PDFJurnalele NineiNo ratings yet
- Modulo Expansor APR-ZX8 PARADOXDocument2 pagesModulo Expansor APR-ZX8 PARADOXAndres AlonsoNo ratings yet
- Bostik Paneltack HM Dekton Tds en 2020Document5 pagesBostik Paneltack HM Dekton Tds en 2020Miguel ZuzaNo ratings yet
- SOLIS Export Limit Settings Using A CT ClampDocument4 pagesSOLIS Export Limit Settings Using A CT ClampEarl IneNo ratings yet
- 3 Ieee C 57 104 1991 2 PDFDocument39 pages3 Ieee C 57 104 1991 2 PDFMarco Godoy100% (1)
- Om Unit-3Document65 pagesOm Unit-3Ekta Rawal100% (1)
- Real-Time Emotion Classification Using EEG Data STDocument26 pagesReal-Time Emotion Classification Using EEG Data STNaman KabadiNo ratings yet
- ACG Beginner Packet PDFDocument78 pagesACG Beginner Packet PDFMichael Keplinger100% (1)
- Assignment On Revision of Statics & Strength of Materials 20 21Document2 pagesAssignment On Revision of Statics & Strength of Materials 20 21Yishak AmanuelNo ratings yet
- STK33562 Sensor LLamadaDocument37 pagesSTK33562 Sensor LLamadaR̳̿e̳̿n̳̿o̳̿s̳̿ ̳̿S̳̿a̳̿i̳̿n̳̿t̳̿No ratings yet
- Scope and Sequence PDFDocument6 pagesScope and Sequence PDFkevin maciaNo ratings yet
- Moldcast Contra Cline Washington Globe & Savannah Lantern Brochure 1996Document10 pagesMoldcast Contra Cline Washington Globe & Savannah Lantern Brochure 1996Alan MastersNo ratings yet
- Analysis of Survival Rates Among Franchise and Independent Small Business StartupsDocument12 pagesAnalysis of Survival Rates Among Franchise and Independent Small Business StartupsPortugal FranchisingNo ratings yet
- MT Lab Manual - WordDocument99 pagesMT Lab Manual - WordAjin JayanNo ratings yet
- F4 Chemistry Project Based Learning 2Document12 pagesF4 Chemistry Project Based Learning 2DANIEL IMRAN BIN SYAHIRUL SAFRI MoeNo ratings yet
- Topical Test 3Document13 pagesTopical Test 3nicoleNo ratings yet