You might also like
- Summary of BookDocument7 pagesSummary of BookRizwan SamorNo ratings yet
- Nag 1610110102Document15 pagesNag 1610110102Sidali RafaNo ratings yet
- Chok 2016Document14 pagesChok 2016Nipa BiswasNo ratings yet
- Displacements and Stresses Due To A Vertical Point Load in An Inhomogeneous Transversely Isotropic Half-SpaceDocument19 pagesDisplacements and Stresses Due To A Vertical Point Load in An Inhomogeneous Transversely Isotropic Half-SpaceHuy Hiep NguyenNo ratings yet
- Engineering Geology: Dian-Qing Li, Shui-Hua Jiang, Zi-Jun Cao, Wei Zhou, Chuang-Bing Zhou, Li-Min ZhangDocument13 pagesEngineering Geology: Dian-Qing Li, Shui-Hua Jiang, Zi-Jun Cao, Wei Zhou, Chuang-Bing Zhou, Li-Min ZhangPaulaNo ratings yet
- Elastoplasticity of Auxetic Materials 2012 Computational Materials ScienceDocument5 pagesElastoplasticity of Auxetic Materials 2012 Computational Materials ScienceGowrish SarvanaNo ratings yet
- Article-Analysis of Pile Groups Under Vertical Harmonic VibrationDocument10 pagesArticle-Analysis of Pile Groups Under Vertical Harmonic VibrationsamimontassarNo ratings yet
- SDGMPE PublishDocument16 pagesSDGMPE Publish高嘉謙No ratings yet
- Thesis Petra UniversityDocument4 pagesThesis Petra UniversityFindSomeoneToWriteMyCollegePaperUK100% (2)
- 2016 Seifried BakerDocument19 pages2016 Seifried Bakercjmentor1279No ratings yet
- A Realistic Way To Obtain Equivalent Young's Modulus of Layered Soil PDFDocument4 pagesA Realistic Way To Obtain Equivalent Young's Modulus of Layered Soil PDFTomasz Cz100% (1)
- Seismic Response Spectra For Probabilistic Analysis of Nonlinear SystemsDocument10 pagesSeismic Response Spectra For Probabilistic Analysis of Nonlinear SystemshamadaniNo ratings yet
- Bearing Capacity of Spatially Random SoilsDocument6 pagesBearing Capacity of Spatially Random SoilsFernando LNo ratings yet
- Design Parameters For Eps Geofoam v1Document3 pagesDesign Parameters For Eps Geofoam v1Bao TruongNo ratings yet
- 10 1016@j Compgeo 2012 07 011Document5 pages10 1016@j Compgeo 2012 07 011MohamedNo ratings yet
- Paper 16Document18 pagesPaper 16Eng SaraaNo ratings yet
- Engineering Applications of Artificial Intelligence: A. Ismail, D-S. JengDocument9 pagesEngineering Applications of Artificial Intelligence: A. Ismail, D-S. JengmansiNo ratings yet
- Dynamic Analysis of Piles Embedded in Transversely Isotropic Soils Using Hybrid ElementsDocument6 pagesDynamic Analysis of Piles Embedded in Transversely Isotropic Soils Using Hybrid ElementsLaboratoire LTGCNo ratings yet
- $RUSQ59SDocument12 pages$RUSQ59SKerim SevinçNo ratings yet
- Yehua Shan 2011Document10 pagesYehua Shan 2011vishakha pandeyNo ratings yet
- Kinematic Interaction in Pile Foundations: F. Dezi, S. Carbonari and G. LeoniDocument8 pagesKinematic Interaction in Pile Foundations: F. Dezi, S. Carbonari and G. LeoniroloheNo ratings yet
- 01 07 P01RationalAssessment PoulosSEAGSE J2018 03Document7 pages01 07 P01RationalAssessment PoulosSEAGSE J2018 03sivabathyNo ratings yet
- The Prediction of The Critical Factor of Safety of Homogeneous FiniteDocument9 pagesThe Prediction of The Critical Factor of Safety of Homogeneous FiniteLaedson PedreiraNo ratings yet
- Probabilistic Analysis of Foundation SettlementDocument15 pagesProbabilistic Analysis of Foundation SettlementnvpmnpNo ratings yet
- Ai 2014Document9 pagesAi 2014MohamedNo ratings yet
- Geostatistical Mixed Beta Regression A Bayesian ApproachDocument14 pagesGeostatistical Mixed Beta Regression A Bayesian Approachamera naNo ratings yet
- J Published 10 CMMM Admittivity P 02Document1 pageJ Published 10 CMMM Admittivity P 02Tushar Kanti BeraNo ratings yet
- Random Field: TheoryDocument13 pagesRandom Field: TheoryAndré OliveiraNo ratings yet
- Wang Etal 2003 CageoDocument13 pagesWang Etal 2003 CageoIrwandi IrwandiNo ratings yet
- Ripperger Et Al. 2008 (Variability of Near-Field Ground Motion From Dynamic)Document22 pagesRipperger Et Al. 2008 (Variability of Near-Field Ground Motion From Dynamic)Aline ABNNo ratings yet
- Information-Theoretic Analysis of Quantum Mechanical Reaction Cross Sections (Chemical Physics Letters, Vol. 34, Issue 1) (1975)Document3 pagesInformation-Theoretic Analysis of Quantum Mechanical Reaction Cross Sections (Chemical Physics Letters, Vol. 34, Issue 1) (1975)sepot24093No ratings yet
- Datos Funcionales Multivariados Muestreo y PredicciónDocument18 pagesDatos Funcionales Multivariados Muestreo y PredicciónLeidy QuinteroNo ratings yet
- Poulos 2018 Subgrade PDFDocument7 pagesPoulos 2018 Subgrade PDFWeimar Garcia0% (1)
- 2015-Effect of 2-D Random Field Discretization On Failure Probability and Failure Mechanism in Probabilistic Slope Stability (Model For Sentence)Document11 pages2015-Effect of 2-D Random Field Discretization On Failure Probability and Failure Mechanism in Probabilistic Slope Stability (Model For Sentence)Ibnu RiswanNo ratings yet
- The Edwards-Wilkinson Model Revisited: Large-Scale Simulations of Dynamic Scaling in 2+1 DimensionsDocument8 pagesThe Edwards-Wilkinson Model Revisited: Large-Scale Simulations of Dynamic Scaling in 2+1 Dimensionsab cNo ratings yet
- Berardi, 2006, Prediction of Shallow Foundation Settlements by Stiffness Strain FactorsDocument4 pagesBerardi, 2006, Prediction of Shallow Foundation Settlements by Stiffness Strain Factorsprisciliano1No ratings yet
- Intro To GeostatisticsDocument50 pagesIntro To GeostatisticsJames Emeka OmekeNo ratings yet
- Deng (2018) (Estimation For The Spatial Autoregressive Threshold Model)Document4 pagesDeng (2018) (Estimation For The Spatial Autoregressive Threshold Model)Abderraouf BelmokhtarNo ratings yet
- Fajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuresDocument17 pagesFajfar and Dolšek (2012) - A Practice Oriented Estimation of The Failure Probability of Building StructuressbanerjeeNo ratings yet
- Final CorrDocument8 pagesFinal CorrvandeputteNo ratings yet
- 1 s2.0 S0926985112001887 MainDocument9 pages1 s2.0 S0926985112001887 MainMohamed AtawaNo ratings yet
- Computers and Geotechnics: J. Huang, D.V. GriffithsDocument8 pagesComputers and Geotechnics: J. Huang, D.V. GriffithsLuchin Lopez MerinoNo ratings yet
- Computers and Geotechnics: Research PaperDocument13 pagesComputers and Geotechnics: Research PaperHans ReyesNo ratings yet
- Work Equivalent Framework Revised PPDocument41 pagesWork Equivalent Framework Revised PPMarek OtrebaNo ratings yet
- Et Al. Et Al. - V (A Gy) / EDocument1 pageEt Al. Et Al. - V (A Gy) / EFernando FanteNo ratings yet
- Nolte G 2004 - Identifying True Brain Interaction From EEG Data Using The Imaginary Part of CoherencyDocument16 pagesNolte G 2004 - Identifying True Brain Interaction From EEG Data Using The Imaginary Part of CoherencyErik MartinezNo ratings yet
- Three-Dimensional Probabilistic Foundation SettlementDocument10 pagesThree-Dimensional Probabilistic Foundation SettlementAbdelmoez ElgarfNo ratings yet
- 1984-SDEE - Seismic Response of End-Bearing Single PilesDocument12 pages1984-SDEE - Seismic Response of End-Bearing Single PilesstraulleNo ratings yet
- Bearing Capacity of Strip and Circular Foundations On Undrained ClayDocument4 pagesBearing Capacity of Strip and Circular Foundations On Undrained ClaymetropodikasNo ratings yet
- Copia de General Transfer-Matrix Method For InterferenceDocument10 pagesCopia de General Transfer-Matrix Method For InterferenceDanielColoradoGaviriaNo ratings yet
- Quantifying Home-Range Overlap: The Importance of The Utilization DistributionDocument14 pagesQuantifying Home-Range Overlap: The Importance of The Utilization DistributionDiego UgarteNo ratings yet
- Damping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsDocument24 pagesDamping Scaling Factors For Vertical Elastic Response Spectra For Shallow Crustal Earthquakes in Active Tectonic RegionsPatricio ChicaizaNo ratings yet
- Tal, The ImpactDocument13 pagesTal, The ImpactCecilia LiNo ratings yet
- Incorporating Spatial Autocorrelation May Invert Observed PatternsDocument4 pagesIncorporating Spatial Autocorrelation May Invert Observed PatternsfkamaliyahNo ratings yet
- The Standard Errors of PersistenceDocument44 pagesThe Standard Errors of PersistenceCorry WangNo ratings yet
- bf02345964 PDFDocument7 pagesbf02345964 PDFahmedNo ratings yet
- Acceptable Ergodic Fluctuations and Simulation of Skewed DistributionsDocument8 pagesAcceptable Ergodic Fluctuations and Simulation of Skewed DistributionsDirceu NascimentoNo ratings yet
- Applied Ocean Research: SciencedirectDocument11 pagesApplied Ocean Research: SciencedirectSumanta HaldarNo ratings yet
- Wipv 33Document174 pagesWipv 33Sumanta HaldarNo ratings yet
- Estimating Spudcan Penetration Resistance PDFDocument13 pagesEstimating Spudcan Penetration Resistance PDFSumanta HaldarNo ratings yet
- Centrifuge Modelling of Spudcan-Pile Interaction in Soft ClayDocument12 pagesCentrifuge Modelling of Spudcan-Pile Interaction in Soft ClaySumanta HaldarNo ratings yet
- New Design Approach For Spudcan Penetration inDocument8 pagesNew Design Approach For Spudcan Penetration inSumanta HaldarNo ratings yet
- Applied Ocean Research: A B C D e FDocument21 pagesApplied Ocean Research: A B C D e FSumanta HaldarNo ratings yet
- Model Uncertainty of Eurocode 7 Approach For Bearing PDFDocument9 pagesModel Uncertainty of Eurocode 7 Approach For Bearing PDFSumanta HaldarNo ratings yet
- Inaccuracies Associated With Estimating Random Measurement Errors by Mark B. Jaksa Peter I. Brooker,:Z and William S. KaggwaDocument9 pagesInaccuracies Associated With Estimating Random Measurement Errors by Mark B. Jaksa Peter I. Brooker,:Z and William S. KaggwaSumanta HaldarNo ratings yet
- Estimating Spudcan Penetration Resistance PDFDocument13 pagesEstimating Spudcan Penetration Resistance PDFSumanta HaldarNo ratings yet
- Structural Safety: SciencedirectDocument14 pagesStructural Safety: SciencedirectSumanta HaldarNo ratings yet
- Structural Safety: SciencedirectDocument14 pagesStructural Safety: SciencedirectSumanta HaldarNo ratings yet
- 1992gazetas DYNPILESOILINTERACTION - PART2LateralDocument18 pages1992gazetas DYNPILESOILINTERACTION - PART2Lateralaviator278No ratings yet
- Scale of Fluctuation For Geotechnical Probabilistic AnalysisDocument7 pagesScale of Fluctuation For Geotechnical Probabilistic AnalysisSumanta HaldarNo ratings yet
- Model Uncertainty of Eurocode 7 Approach For Bearing PDFDocument9 pagesModel Uncertainty of Eurocode 7 Approach For Bearing PDFSumanta HaldarNo ratings yet
- Large Scale Computational Simulation in Geotechnical Earthquake EngineeringDocument10 pagesLarge Scale Computational Simulation in Geotechnical Earthquake EngineeringSumanta HaldarNo ratings yet
- Model Uncertainty For Predicting The Bearing Capacity ofDocument14 pagesModel Uncertainty For Predicting The Bearing Capacity ofSumanta HaldarNo ratings yet
- Model Uncertainty For Predicting The Bearing Capacity ofDocument14 pagesModel Uncertainty For Predicting The Bearing Capacity ofSumanta HaldarNo ratings yet
- Sextosetal - Inelastic Dynamic Analysis of RC Bridges Accounting1 PDFDocument21 pagesSextosetal - Inelastic Dynamic Analysis of RC Bridges Accounting1 PDFJakov OrebNo ratings yet
- RDSO Guide Lines of Earthwork 2003Document90 pagesRDSO Guide Lines of Earthwork 2003Abishek Kumar100% (1)
- Measuring Shear Wave Velocity Using Bender Elements: E. C. Leong, S. H. Yeo, and H. RahardjoDocument11 pagesMeasuring Shear Wave Velocity Using Bender Elements: E. C. Leong, S. H. Yeo, and H. RahardjoSumanta HaldarNo ratings yet
- Interacción de La Estructura Del Suelo de Puentes de Pilares IntegralesDocument8 pagesInteracción de La Estructura Del Suelo de Puentes de Pilares IntegralesAaron Arango AyalaNo ratings yet
- Complex NumbersDocument26 pagesComplex NumbersJom AgullanaNo ratings yet
- Sextosetal - Inelastic Dynamic Analysis of RC Bridges Accounting1 PDFDocument21 pagesSextosetal - Inelastic Dynamic Analysis of RC Bridges Accounting1 PDFJakov OrebNo ratings yet
- Statistical Analyses of Model Factors in Reliability-Based Limit-State Design of Drilled Shafts Under Axial LoadingDocument19 pagesStatistical Analyses of Model Factors in Reliability-Based Limit-State Design of Drilled Shafts Under Axial LoadingSumanta HaldarNo ratings yet
- Vaio CatalogueDocument19 pagesVaio CataloguebiorajaNo ratings yet
- 1450y04958 Zafer Kahveci-Oğuzhan Aydemir PDFDocument16 pages1450y04958 Zafer Kahveci-Oğuzhan Aydemir PDFroger deza saycoNo ratings yet
- 3 - Key Features of An SSAA and Design Topics - tcm14-80216 PDFDocument29 pages3 - Key Features of An SSAA and Design Topics - tcm14-80216 PDFfle92No ratings yet
- IGC 2017 - Runout of Flow Landslides - Kim Et Al 19072017Document12 pagesIGC 2017 - Runout of Flow Landslides - Kim Et Al 19072017Sumanta HaldarNo ratings yet
- IGC 2017 - Runout of Flow Landslides - Kim Et Al 19072017Document12 pagesIGC 2017 - Runout of Flow Landslides - Kim Et Al 19072017Sumanta HaldarNo ratings yet
- MITRES 6-010S13 Chap03 PDFDocument47 pagesMITRES 6-010S13 Chap03 PDFSrinyantu ChatterjeeNo ratings yet
- Seat SummaryDocument2 pagesSeat SummaryVaishnevNo ratings yet
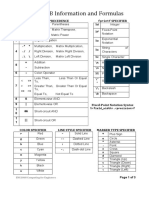
- MATLAB Information and Formulas: Operator Precedence Fprintf SPECIFIERDocument3 pagesMATLAB Information and Formulas: Operator Precedence Fprintf SPECIFIEROmar El MasryNo ratings yet
- PhysicsDocument52 pagesPhysicsivana67% (3)
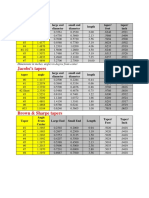
- Dimensions of Standard TapersDocument3 pagesDimensions of Standard TapersRohan KarNo ratings yet
- Statistical Learning Theory: 18.657: Mathematics of Machine LearningDocument9 pagesStatistical Learning Theory: 18.657: Mathematics of Machine LearningMega Silvia HasugianNo ratings yet
- Bergman (2016) An Invitation To General Algebra - and Universal ConstructionsDocument554 pagesBergman (2016) An Invitation To General Algebra - and Universal ConstructionsLógica Usb100% (1)
- Ideal Fluid Flow Engineering PDFDocument55 pagesIdeal Fluid Flow Engineering PDFsarmadNo ratings yet
- Topic 3 SummaryDocument2 pagesTopic 3 SummaryyouzhattyNo ratings yet
- Berry ConnectionDocument6 pagesBerry ConnectionAshwin BalajiNo ratings yet
- Notes On Mean Embeddings and Covariance Operators: Arthur Gretton February 24, 2015Document15 pagesNotes On Mean Embeddings and Covariance Operators: Arthur Gretton February 24, 2015Dom DeSiciliaNo ratings yet
- Jacobian MethodsDocument23 pagesJacobian MethodsOdhieNo ratings yet
- Dwnload Full Applied Calculus 7th Edition Berresford Solutions Manual PDFDocument35 pagesDwnload Full Applied Calculus 7th Edition Berresford Solutions Manual PDFabandontidde.obwdax100% (16)
- Tutorialsheet 2 PDFDocument2 pagesTutorialsheet 2 PDFdevang_siNo ratings yet
- Vectors & 3-D Geometry - 1HHHHHHHHHHHHHHHHHHHHHHDocument3 pagesVectors & 3-D Geometry - 1HHHHHHHHHHHHHHHHHHHHHHSai GokulNo ratings yet
- Operations On Power Series Related To Taylor Series: QuestionsDocument3 pagesOperations On Power Series Related To Taylor Series: QuestionsSaddie SoulaNo ratings yet
- Discrete Random Variables and Probability DistributionDocument40 pagesDiscrete Random Variables and Probability DistributionBren ManaleNo ratings yet
- Power SeriesDocument18 pagesPower SeriesIbsaNo ratings yet
- Linear EquationsDocument12 pagesLinear EquationsAli ImranNo ratings yet
- Maths Class Xii Sample Paper Test 01 of Term 2 Exam 2021 22Document2 pagesMaths Class Xii Sample Paper Test 01 of Term 2 Exam 2021 22kelvin nathNo ratings yet
- MAS100Document3 pagesMAS100Ki Joung JangNo ratings yet
- AP Intermediate 1st Year Maths IB Reduced SyllabusDocument2 pagesAP Intermediate 1st Year Maths IB Reduced SyllabusCharan Reddy RenatiNo ratings yet
- Erum Dost - Pure Mathematics - Analysis IDocument19 pagesErum Dost - Pure Mathematics - Analysis Iuser77975No ratings yet
- Fatigue Analysis Using XFEMDocument194 pagesFatigue Analysis Using XFEMVenkatesh VarmaNo ratings yet
- CCS Module 1Document127 pagesCCS Module 1ADLURI SRIKARNo ratings yet
- General Mathematics Lesson 3 Operations On Functions & Composition of FunctionsDocument20 pagesGeneral Mathematics Lesson 3 Operations On Functions & Composition of FunctionsBernadette Remigio - JovellanosNo ratings yet
- ANSYS Mechanical Introduction To Structural NonlinearitiesDocument17 pagesANSYS Mechanical Introduction To Structural NonlinearitiesluchotevesNo ratings yet
- Functional AnalysisDocument131 pagesFunctional AnalysisDragos Marin100% (1)
- Numerical Analysis of A Bisection-Exclusion Method To Find Zeros of Univariate Analytic FunctionsDocument39 pagesNumerical Analysis of A Bisection-Exclusion Method To Find Zeros of Univariate Analytic FunctionsLucas SantosNo ratings yet
- Inverse of Strictly Monotone Function: 2 AnswersDocument1 pageInverse of Strictly Monotone Function: 2 AnswersJohn SmithNo ratings yet