You might also like
- Final Record For 3rd SemDocument96 pagesFinal Record For 3rd SemBirundha Shri MaruthamuthuNo ratings yet
- Mec ManualDocument57 pagesMec ManualJ. VinithaNo ratings yet
- Program For Interfacing 8279: 1. 8085 Microprocessor Kit 2. 8279 Interfacing Module 3. Power SupplyDocument21 pagesProgram For Interfacing 8279: 1. 8085 Microprocessor Kit 2. 8279 Interfacing Module 3. Power SupplySubhashini MurugesanNo ratings yet
- MP Lab ManualDocument11 pagesMP Lab ManualRaj KumarNo ratings yet
- Ec522 8051 05Document52 pagesEc522 8051 05Anurag BansalNo ratings yet
- Lab Sheet 2Document9 pagesLab Sheet 2akshaypnair94No ratings yet
- Microcontroller and Interfacing LabDocument49 pagesMicrocontroller and Interfacing LabAkshat MishraNo ratings yet
- Micro Controller Lab Manual (06ESL47)Document67 pagesMicro Controller Lab Manual (06ESL47)aamreen818No ratings yet
- The 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayDocument34 pagesThe 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayAkshwin KisoreNo ratings yet
- Expt. No. 4 Interfacing Display Devices With 8051Document13 pagesExpt. No. 4 Interfacing Display Devices With 8051UJNo ratings yet
- Basic Mathematical OperationsDocument2 pagesBasic Mathematical OperationssdcribdddNo ratings yet
- MC Lab - EXP2Document3 pagesMC Lab - EXP2Mohammad SamheelNo ratings yet
- Assembly Language ProgramsDocument2 pagesAssembly Language ProgramsElango PerumalNo ratings yet
- CAM Module 3 NotesDocument30 pagesCAM Module 3 NotesMalavika R NairNo ratings yet
- Introduction To Program Development Tool Chain Using Keil Uvision3Document41 pagesIntroduction To Program Development Tool Chain Using Keil Uvision3Virang PatelNo ratings yet
- Statement: Write A Assembly Program To Transmit A Message FromDocument12 pagesStatement: Write A Assembly Program To Transmit A Message Froms,reegan_siet5749100% (1)
- ProgramsDocument24 pagesProgramsP HAMSA DATTA0% (1)
- MPI Lab Programs for 8086 Assembly LanguageDocument8 pagesMPI Lab Programs for 8086 Assembly LanguageminredledNo ratings yet
- Interfacing 8255 PPI to 8086 MicroprocessorDocument44 pagesInterfacing 8255 PPI to 8086 MicroprocessorNisha TNo ratings yet
- LMECE306Document36 pagesLMECE306Abhishek SrivastavaNo ratings yet
- Es FILE FinalDocument13 pagesEs FILE FinalConhas ThakkarNo ratings yet
- Exchange The Contents of Memory LocationsDocument4 pagesExchange The Contents of Memory LocationsVinay PatelNo ratings yet
- MC Lab - EXP4Document3 pagesMC Lab - EXP4Mohammad SamheelNo ratings yet
- Embedded Lab OBSERVATIONDocument85 pagesEmbedded Lab OBSERVATIONcharmingtilakNo ratings yet
- Micro Controller LabDocument33 pagesMicro Controller LabberihuteNo ratings yet
- Module2 - 8051 Instruction Set - UpdatedDocument32 pagesModule2 - 8051 Instruction Set - UpdatedPraveen G MNo ratings yet
- Increment A Number 5 Times Using InrDocument15 pagesIncrement A Number 5 Times Using InrAbhay SidhwaniNo ratings yet
- 8051 Instruction Set and Registers ExplainedDocument134 pages8051 Instruction Set and Registers ExplainedAnirudh sai ReddyNo ratings yet
- 8085 Microprocessor Programs: Microprocessor & Microcontroller Lab ManualDocument16 pages8085 Microprocessor Programs: Microprocessor & Microcontroller Lab ManualLIFE of PSNo ratings yet
- EC237 Lab Assignment-1Document87 pagesEC237 Lab Assignment-1421243No ratings yet
- LAB-Digital Assignment-Interfacing IC Working IF ALP PDFDocument9 pagesLAB-Digital Assignment-Interfacing IC Working IF ALP PDFYOGESH PANDITNo ratings yet
- Stepper Motor InterfacingDocument5 pagesStepper Motor InterfacingShobanraj Letchumanan100% (1)
- Assignment 3Document13 pagesAssignment 3abdullahNo ratings yet
- ProgrammeDocument11 pagesProgrammeSaurabh KumarNo ratings yet
- Unit-3 Alarm ControllerDocument5 pagesUnit-3 Alarm Controllernitheschitrav07No ratings yet
- Interfacing Digital-To-Analog Converter To 8086 Using 8255Document4 pagesInterfacing Digital-To-Analog Converter To 8086 Using 8255C S75% (4)
- Assignment 1Document9 pagesAssignment 1Smarajit MishraNo ratings yet
- Assembly Language Programming 8085 PDFDocument29 pagesAssembly Language Programming 8085 PDFRoshan ShawNo ratings yet
- Micro Controller ManualDocument69 pagesMicro Controller ManualSiddharth SidhuNo ratings yet
- Microprocess Ors and Micro Controllers Lab Report: DATE: 15 September 2011Document25 pagesMicroprocess Ors and Micro Controllers Lab Report: DATE: 15 September 2011rajgopalsmNo ratings yet
- Micro Controllers Lab Final - DSCEDocument37 pagesMicro Controllers Lab Final - DSCESreeda PerikamanaNo ratings yet
- Experiment 2: To Perform Addition & Subtraction of Two 8 Bit Numbers Using Microprocessor 8085A and 8051Document10 pagesExperiment 2: To Perform Addition & Subtraction of Two 8 Bit Numbers Using Microprocessor 8085A and 8051Swapnita GoyalNo ratings yet
- Ashwin Pillai M & M Lab FileDocument24 pagesAshwin Pillai M & M Lab FileSUKRIT SAHUNo ratings yet
- Microcontrollers Lab: Microprocessor andDocument7 pagesMicrocontrollers Lab: Microprocessor andShuktika SrivastavaNo ratings yet
- MPMC Unit IV BiherDocument22 pagesMPMC Unit IV BiherSankarsh ReddyNo ratings yet
- GateDocument8 pagesGateGopinathManoharanNo ratings yet
- MPMC NewmanualDocument186 pagesMPMC NewmanualMusicallyAhp0% (1)
- Akd ReportDocument77 pagesAkd Reportsk39693No ratings yet
- Batch 5: Micro Processor Assign. Presentation. - 2Document40 pagesBatch 5: Micro Processor Assign. Presentation. - 2Shahid KhanNo ratings yet
- ES FileDocument41 pagesES FileAman GargNo ratings yet
- Module 3Document14 pagesModule 3Rohit AnejaNo ratings yet
- ESI Record RemovedDocument17 pagesESI Record Removedsangee20039No ratings yet
- 20EC3352 LAB EXPERIMENTS OldDocument47 pages20EC3352 LAB EXPERIMENTS Oldswathi kesanaNo ratings yet
- MC Lab Manual New SchemeDocument25 pagesMC Lab Manual New Schemeanon_790320219No ratings yet
- Imp 5 AnswerDocument9 pagesImp 5 Answergodhanipriyank8No ratings yet
- MP Lab Manual StudentDocument111 pagesMP Lab Manual StudentVinu ArunagiriNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Zero Crossing Detector: VCC 15.0V Xsc1Document14 pagesZero Crossing Detector: VCC 15.0V Xsc1Kote Bhanu PrakashNo ratings yet
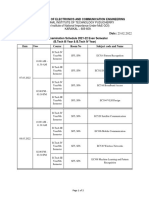
- CA2 - EXAMINATION - Schedule - Mar - 2022 - Btech - III&IVyearDocument2 pagesCA2 - EXAMINATION - Schedule - Mar - 2022 - Btech - III&IVyearKote Bhanu PrakashNo ratings yet
- Chemistry Project 61Document19 pagesChemistry Project 61Kote Bhanu PrakashNo ratings yet
- 04-09-2022 - Hand Written NotesDocument17 pages04-09-2022 - Hand Written NotesKote Bhanu PrakashNo ratings yet
- Swaraj PhyDocument24 pagesSwaraj PhyKote Bhanu PrakashNo ratings yet
- Phy PrintoutDocument9 pagesPhy PrintoutKote Bhanu PrakashNo ratings yet
- Digital Filters Chapter: Problem SolutionsDocument27 pagesDigital Filters Chapter: Problem Solutionsprakashranjit_736608No ratings yet
- Chem PrintoutDocument8 pagesChem PrintoutKote Bhanu PrakashNo ratings yet
- MsandDocument4 pagesMsandKote Bhanu PrakashNo ratings yet
- Dimensional AnalysesDocument3 pagesDimensional Analysesvier_phyNo ratings yet
- Chap2 Electronic PDFDocument50 pagesChap2 Electronic PDFAljun AndusNo ratings yet
- Applicants Pledge of Future Support To FfeDocument2 pagesApplicants Pledge of Future Support To FfeKote Bhanu Prakash100% (2)
- GdhyreyterDocument5 pagesGdhyreyterRupini PonnamalanNo ratings yet
- GdhyreyterDocument5 pagesGdhyreyterRupini PonnamalanNo ratings yet
- Sec 6-10 PDFDocument39 pagesSec 6-10 PDFAreebaNo ratings yet
- The Radiation MechanismDocument2 pagesThe Radiation MechanismKote Bhanu PrakashNo ratings yet
- Taylor Series in ChemistryDocument4 pagesTaylor Series in ChemistryAndreea DărîngăNo ratings yet
- Academic Calendar July-Dec 2019 PDFDocument1 pageAcademic Calendar July-Dec 2019 PDFKote Bhanu PrakashNo ratings yet
- CamScanner document scansDocument32 pagesCamScanner document scansKote Bhanu PrakashNo ratings yet
- Quiz #1 - Quadratic EquationsDocument4 pagesQuiz #1 - Quadratic EquationsKote Bhanu PrakashNo ratings yet
- ECE CDocument73 pagesECE CKote Bhanu PrakashNo ratings yet
- Consolidated PSV Catalog PDFDocument481 pagesConsolidated PSV Catalog PDFaxiomataNo ratings yet
- World's Smallest: Up To 48 ZonesDocument16 pagesWorld's Smallest: Up To 48 ZonesPedroGomes2No ratings yet
- Quick Start Guide: AR100&AR120&AR150&AR160&AR200& AR1200&AR2200&AR3200&AR3600 Series Enterprise RoutersDocument12 pagesQuick Start Guide: AR100&AR120&AR150&AR160&AR200& AR1200&AR2200&AR3200&AR3600 Series Enterprise Routersdjezzy djezzyNo ratings yet
- Hardening Windows 10 Workstations for SecurityDocument54 pagesHardening Windows 10 Workstations for Securitykrvros0% (1)
- SQL Advanced SQL Query Optimization Techniques B09978MXWXDocument125 pagesSQL Advanced SQL Query Optimization Techniques B09978MXWXmoon26100% (1)
- How To Pass The NC2 Tesda ExamDocument3 pagesHow To Pass The NC2 Tesda Examrezhablo100% (2)
- Spec Sheet - CD-1004S - 051215Document2 pagesSpec Sheet - CD-1004S - 051215Manuel Antonio Núñez Valenzuela0% (1)
- ADET - Labq2Document5 pagesADET - Labq2Daniel OlajayNo ratings yet
- Anguttara-Nikaya. Part 4 (Roman-Script)Document485 pagesAnguttara-Nikaya. Part 4 (Roman-Script)EvamMeSuttam100% (1)
- RACIDocument26 pagesRACImailtonoorul4114No ratings yet
- FDMEE Integration With Open Interface AdapterDocument18 pagesFDMEE Integration With Open Interface AdapterGabriel GutierrezNo ratings yet
- Case Study: Automating Steam Turbine OperationDocument3 pagesCase Study: Automating Steam Turbine OperationFernando Crespo MonsalveNo ratings yet
- i.MX 6 Series USB Certification GuideDocument126 pagesi.MX 6 Series USB Certification GuideXaoc KabataNo ratings yet
- Web-based SIWES management systemDocument8 pagesWeb-based SIWES management systemjibrin ahamaduNo ratings yet
- AnyDocument294 pagesAnyAnupam SrivastavaNo ratings yet
- Diseño de Sonrisa Digital PDFDocument10 pagesDiseño de Sonrisa Digital PDFcristinaNo ratings yet
- Hi, I'm Dr. Kat, Clinical Sexologist and Marriage and Family TherapistDocument26 pagesHi, I'm Dr. Kat, Clinical Sexologist and Marriage and Family TherapistAndrew Richard ThompsonNo ratings yet
- Export PDF Form Data To XMLDocument2 pagesExport PDF Form Data To XMLKarinNo ratings yet
- TutorialDocument401 pagesTutorialGabi MunteanuNo ratings yet
- Engineering Experiment II: AM Modulation and DemodulationDocument2 pagesEngineering Experiment II: AM Modulation and Demodulationblasphemer_morteNo ratings yet
- NS2 Workshop Module-1: Presented by Sreenu.GDocument44 pagesNS2 Workshop Module-1: Presented by Sreenu.GMukesh MamoriaNo ratings yet
- LaTeX Math Symbols GuideDocument6 pagesLaTeX Math Symbols GuideLuiz CamargoNo ratings yet
- SQ Windows Driver v4.67.0 Release NotesDocument2 pagesSQ Windows Driver v4.67.0 Release NotesJeisson Catalan RuizNo ratings yet
- The X86 Microprocessor: ObjectivesDocument32 pagesThe X86 Microprocessor: Objectivespapikhu36100% (4)
- CS Question Bank (2014-2017Document52 pagesCS Question Bank (2014-2017VikashNo ratings yet
- Apache SparkDocument54 pagesApache SparkGatien Jordan LonlaNo ratings yet
- Itt FinalDocument52 pagesItt FinalDhruvi ShahNo ratings yet
- Subcontracting For MRO Processes Sap PMDocument22 pagesSubcontracting For MRO Processes Sap PMratnesh_xp100% (2)
- T24 Close of Business (COB) - T24 HelperDocument17 pagesT24 Close of Business (COB) - T24 HelperNett2k100% (8)
- PC5010 - Manual Instalare PDFDocument60 pagesPC5010 - Manual Instalare PDFDarie SilviuNo ratings yet