You might also like
- Business Statistics: Fourth Canadian EditionDocument41 pagesBusiness Statistics: Fourth Canadian EditionTaron AhsanNo ratings yet
- Tolerancia de Rosca Metrica 6G PDFDocument20 pagesTolerancia de Rosca Metrica 6G PDFRodrigo Tikim0% (3)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Dokumen - Tips Homework 3 Solution Department of Statistics Ovitekstat526 Spring11filespdfshw3 SolpdfstatDocument12 pagesDokumen - Tips Homework 3 Solution Department of Statistics Ovitekstat526 Spring11filespdfshw3 Solpdfstatbourday RachidNo ratings yet
- ECE 5500 FALL 2020 Power System Analysis Homework Assignment # 1 Due Date: September 10, 2020Document7 pagesECE 5500 FALL 2020 Power System Analysis Homework Assignment # 1 Due Date: September 10, 2020Mahmoud EL-SayedNo ratings yet
- Canales Moreno Isidro FerminDocument17 pagesCanales Moreno Isidro FerminAndrei PetreNo ratings yet
- Helical Gear ProblemsDocument26 pagesHelical Gear ProblemsPrakash Joshi83% (6)
- Full Test-2Document10 pagesFull Test-2instasafe424No ratings yet
- SPT - 1 SolutionsDocument10 pagesSPT - 1 SolutionsChristopher NolanNo ratings yet
- Test - 9 SolutionsDocument3 pagesTest - 9 SolutionsashuisobaNo ratings yet
- Harmonic 1Document41 pagesHarmonic 1Renny BalaNo ratings yet
- Proiect Om2Document20 pagesProiect Om2Gabriel CimpeanNo ratings yet
- Chap 2Document6 pagesChap 2김민성No ratings yet
- (Ce-642) Machine Foundation Project ProblemsDocument13 pages(Ce-642) Machine Foundation Project ProblemsArshad RazaNo ratings yet
- M10 - Stresses in Soil MassDocument22 pagesM10 - Stresses in Soil MassJOHNWEL CHANNo ratings yet
- Calculation of Gear Dimensions - KHK Gears PDFDocument25 pagesCalculation of Gear Dimensions - KHK Gears PDFlawlawNo ratings yet
- UluuDocument8 pagesUluuJoshua SajiNo ratings yet
- Qestion 4: − 2 π log z =−100 1 − 300i 2 log zDocument9 pagesQestion 4: − 2 π log z =−100 1 − 300i 2 log zCarlos PalominoNo ratings yet
- Fpy 0316 - Mid Sem 1 (2021-22) QuestionDocument11 pagesFpy 0316 - Mid Sem 1 (2021-22) QuestionDurga ShrieNo ratings yet
- Chap 12Document13 pagesChap 12api-3702256100% (4)
- N3 Engineering Science August 2018 MemorandumDocument7 pagesN3 Engineering Science August 2018 MemorandumNkazimulo MbonaniNo ratings yet
- Demo 3 - MA4702 - AY2017 18 - Q 3 4Document9 pagesDemo 3 - MA4702 - AY2017 18 - Q 3 4xaviertoh18No ratings yet
- 2022-Ch8-1-Lossy MediaDocument18 pages2022-Ch8-1-Lossy Media鄒雨笙 TZOU,YU-SHENG F64081070No ratings yet
- Kinds of GearsDocument51 pagesKinds of GearsIrfanNo ratings yet
- Answers To Selected Exercises For Chapter 1: Section 1.1 (Page 16)Document3 pagesAnswers To Selected Exercises For Chapter 1: Section 1.1 (Page 16)CisjeNo ratings yet
- Topic 6.5 - Retaining Walls (Applications)Document41 pagesTopic 6.5 - Retaining Walls (Applications)ZxeroNo ratings yet
- Canal DesignDocument4 pagesCanal Designmanrinkon13No ratings yet
- University of Palestine Gaza Strip Civil Engineering College Numerical Analysis CIVL 3309 Dr. Suhail LubbadDocument24 pagesUniversity of Palestine Gaza Strip Civil Engineering College Numerical Analysis CIVL 3309 Dr. Suhail LubbadHazem AlmasryNo ratings yet
- EEE 1121 AC RevisedDocument109 pagesEEE 1121 AC RevisedMahiya KulsumNo ratings yet
- UNIT - 2 SteelDocument58 pagesUNIT - 2 Steelkirann2103No ratings yet
- Steel BeamsDocument21 pagesSteel BeamsAli HassenNo ratings yet
- 4 - Chapter 3Document15 pages4 - Chapter 3AhmedNo ratings yet
- Calculation of Gear DimensionsDocument22 pagesCalculation of Gear DimensionsdressfeetNo ratings yet
- Power Spectral DensityDocument10 pagesPower Spectral DensityRonaldo Cachi DelgadoNo ratings yet
- Lesson AGMA Standard - Example 1 & 2Document23 pagesLesson AGMA Standard - Example 1 & 2Sphumelele SibuthaNo ratings yet
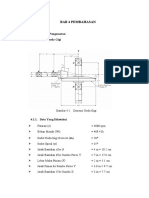
- Bab 4 Pembahasan: 4.1. Data Hasil Pengamatan 4.1.1 Dimensi Roda GigiDocument7 pagesBab 4 Pembahasan: 4.1. Data Hasil Pengamatan 4.1.1 Dimensi Roda GigiKurniadi SabdaNo ratings yet
- Proiect Organe de Masini (Reductor)Document25 pagesProiect Organe de Masini (Reductor)SebiNo ratings yet
- Tutorial7 UpdatedDocument10 pagesTutorial7 Updatedee22b139No ratings yet
- C4 2014Document9 pagesC4 2014James ConnaughtonNo ratings yet
- Sample RegressionDocument4 pagesSample RegressionMiko ArniñoNo ratings yet
- AMFODocument4 pagesAMFOOsei ElijahNo ratings yet
- Formula Sheet ExamDocument4 pagesFormula Sheet ExamhenryNo ratings yet
- حل المسائل کتاب مکانیک و شکل دهی فلزات رابرت کدل و ویلیام هاسفورد - ویرایش سوم-1Document3 pagesحل المسائل کتاب مکانیک و شکل دهی فلزات رابرت کدل و ویلیام هاسفورد - ویرایش سوم-1hamedNo ratings yet
- C4 2012Document9 pagesC4 2012James ConnaughtonNo ratings yet
- Vehicle Dynamics Project: University "Transilvania" of BraşovDocument11 pagesVehicle Dynamics Project: University "Transilvania" of BraşovAlexa StrumfNo ratings yet
- Charts and Tables PDFDocument2 pagesCharts and Tables PDFAbdoNo ratings yet
- Problem 10.26:: E E E, NoteDocument8 pagesProblem 10.26:: E E E, Notenskprasad89No ratings yet
- C4 2013Document8 pagesC4 2013James ConnaughtonNo ratings yet
- 4.5 One-way Slabs. Ι Apostolos Konstantinidis Static Analysis. Volume BDocument10 pages4.5 One-way Slabs. Ι Apostolos Konstantinidis Static Analysis. Volume BHeris Dogga100% (1)
- 0.1 Eingangskennwerte: 0.1.1 AllgemeinesDocument7 pages0.1 Eingangskennwerte: 0.1.1 AllgemeineslöliNo ratings yet
- C4 2011Document9 pagesC4 2011James ConnaughtonNo ratings yet
- Design of ColumnsDocument3 pagesDesign of ColumnsAngelo AmarNo ratings yet
- Roark's - Discontinuity Stress at Junction of Shell & HeadDocument13 pagesRoark's - Discontinuity Stress at Junction of Shell & HeadRey FiedacanNo ratings yet
- PhysicsDocument12 pagesPhysicscbsegirlsaipmtNo ratings yet
- JassimDocument29 pagesJassimZain Communication0% (1)
- Assignment 3.1 MatrixDocument10 pagesAssignment 3.1 MatrixRefisa JiruNo ratings yet
- Sud ExcDocument29 pagesSud Excp_ignatiusNo ratings yet
- Answer Tutor 2 AnimatedDocument13 pagesAnswer Tutor 2 AnimatedFgj JhgNo ratings yet
- PlateDocument13 pagesPlateRajendra PraharajNo ratings yet
- Chapt 9Document15 pagesChapt 9prosaadNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
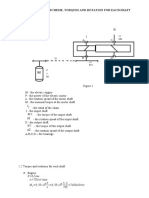
- Oo1. Structural Scheme, Torques and Rotation For Each Shaft: N 705rot /min M P NDocument23 pagesOo1. Structural Scheme, Torques and Rotation For Each Shaft: N 705rot /min M P NCsabesz BenczoNo ratings yet
- CCA28 Rom-CaroseriaDocument7 pagesCCA28 Rom-CaroseriaCsabesz BenczoNo ratings yet
- CCA28 Rom-CaroseriaDocument7 pagesCCA28 Rom-CaroseriaCsabesz BenczoNo ratings yet
- 30°. It Considers Horizontal Even Road and Low VelocitiesDocument3 pages30°. It Considers Horizontal Even Road and Low VelocitiesCsabesz BenczoNo ratings yet
- Review Rachna WasteDocument9 pagesReview Rachna WasteSanjeet DuhanNo ratings yet
- Hawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersDocument133 pagesHawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersTinsae LireNo ratings yet
- Bohler Dcms T-MCDocument1 pageBohler Dcms T-MCFlaviu-Andrei AstalisNo ratings yet
- Lalkitab Varshphal Chart PDFDocument6 pagesLalkitab Varshphal Chart PDFcalvinklein_22ukNo ratings yet
- N6867e PXLP 3000Document7 pagesN6867e PXLP 3000talaporriNo ratings yet
- Hunger Games Mini Socratic Seminar2012Document4 pagesHunger Games Mini Socratic Seminar2012Cary L. TylerNo ratings yet
- IFN 554 Week 3 Tutorial v.1Document19 pagesIFN 554 Week 3 Tutorial v.1kitkataus0711No ratings yet
- Input and Output Statements PDFDocument11 pagesInput and Output Statements PDFRajendra BuchadeNo ratings yet
- Pre Intermediate Talking ShopDocument4 pagesPre Intermediate Talking ShopSindy LiNo ratings yet
- Concrete Lab ManualDocument20 pagesConcrete Lab ManualkelmazodroNo ratings yet
- HyperconnectivityDocument5 pagesHyperconnectivityramNo ratings yet
- Introducing Eventstorming-4Document1 pageIntroducing Eventstorming-4Alex TrujilloNo ratings yet
- Tools of Persuasion StudentsDocument4 pagesTools of Persuasion StudentsBelén Revilla GonzálesNo ratings yet
- Yz125 2005Document58 pagesYz125 2005Ignacio Sanchez100% (1)
- USB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854Document1 pageUSB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854sitrakiniavoNo ratings yet
- Slip Ring Motor CheckDocument3 pagesSlip Ring Motor CheckRolando LoayzaNo ratings yet
- Science, Technology and Society Module #1Document13 pagesScience, Technology and Society Module #1Brent Alfred Yongco67% (6)
- Bug Life Cycle in Software TestingDocument2 pagesBug Life Cycle in Software TestingDhirajNo ratings yet
- IVISOR Mentor IVISOR Mentor QVGADocument2 pagesIVISOR Mentor IVISOR Mentor QVGAwoulkanNo ratings yet
- EE360 - Magnetic CircuitsDocument48 pagesEE360 - Magnetic Circuitsبدون اسمNo ratings yet
- Using Impact IX49 and 61 With Nektar DAW Integration 1.1Document21 pagesUsing Impact IX49 and 61 With Nektar DAW Integration 1.1Eko SeynNo ratings yet
- 4.1 Hydrostatic Force On Curved Surfaces - CE 309-CE22S2 - Fluid MechanicsDocument4 pages4.1 Hydrostatic Force On Curved Surfaces - CE 309-CE22S2 - Fluid MechanicsRUSSELNo ratings yet
- Analysis of Green Entrepreneurship Practices in IndiaDocument5 pagesAnalysis of Green Entrepreneurship Practices in IndiaK SrivarunNo ratings yet
- Dynamic Shear Modulus SoilDocument14 pagesDynamic Shear Modulus SoilMohamed A. El-BadawiNo ratings yet
- Jazz PrepaidDocument4 pagesJazz PrepaidHoney BunnyNo ratings yet
- 01 IntroductionDocument15 pages01 IntroductionAli FarhatNo ratings yet
- The Neuroscience of Helmholtz and The Theories of Johannes Muèller Part 2: Sensation and PerceptionDocument22 pagesThe Neuroscience of Helmholtz and The Theories of Johannes Muèller Part 2: Sensation and PerceptionCrystal JenningsNo ratings yet
- Sim Educ101Document101 pagesSim Educ101Rolando AmadNo ratings yet
- Retirement 01Document2 pagesRetirement 01Nonema Casera JuarezNo ratings yet