You might also like
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- KP-C500P (KTA19-G3A) Generating Set Technical Data SheetDocument5 pagesKP-C500P (KTA19-G3A) Generating Set Technical Data SheetMario CastroNo ratings yet
- Esm-7710 Man Env04Document44 pagesEsm-7710 Man Env04itsirc67No ratings yet
- TYPE ATS-050: Switching Control UnitDocument8 pagesTYPE ATS-050: Switching Control UnitAhmed El-AdawyNo ratings yet
- Micrologic 2.0A PDFDocument154 pagesMicrologic 2.0A PDFGabriel ZorattiNo ratings yet
- GPM 22Document2 pagesGPM 22Khalid SaddikNo ratings yet
- SED MAN GC2599 002 Manual For GC2599 ControllerDocument78 pagesSED MAN GC2599 002 Manual For GC2599 ControllerkrishnaNo ratings yet
- Manual Modulo DSE520Document20 pagesManual Modulo DSE520jordaz30No ratings yet
- PED Start Um EN Feb00Document19 pagesPED Start Um EN Feb00Mamadou Djibril Ba100% (1)
- Dse 540Document2 pagesDse 540TariqMaqsoodNo ratings yet
- Eaom-36r Eng v05Document8 pagesEaom-36r Eng v05Khaled KamelNo ratings yet
- Pressure Transmitter 0-10v ScheiderDocument2 pagesPressure Transmitter 0-10v ScheiderppsatsNo ratings yet
- Lincol305d Manual de Servicio PDFDocument198 pagesLincol305d Manual de Servicio PDFesthid bustamante100% (1)
- 如何更新和配置ec2087Document12 pages如何更新和配置ec2087TTIBCCANo ratings yet
- Newage Sx440 Avr, Replacement: Same Fit Form and Function As The Original Newage SX440Document4 pagesNewage Sx440 Avr, Replacement: Same Fit Form and Function As The Original Newage SX440marcosluna68No ratings yet
- HGM6300D V2.1 enDocument34 pagesHGM6300D V2.1 enSteven BaynesNo ratings yet
- Ac70 Manual v1 3 PDFDocument147 pagesAc70 Manual v1 3 PDFkasim leeNo ratings yet
- Schematic - Dcto DC Converter Based On Uc3843 - Sheet 1 - 20180719202230 PDFDocument1 pageSchematic - Dcto DC Converter Based On Uc3843 - Sheet 1 - 20180719202230 PDFWajahatHabibNo ratings yet
- G3412 Con 4.2 PDFDocument15 pagesG3412 Con 4.2 PDFJaime Rocha QuimbayaNo ratings yet
- Cat Electronic Modular Control Panel (EMCP) 4.3 Upgrade KitDocument2 pagesCat Electronic Modular Control Panel (EMCP) 4.3 Upgrade KitKaung KharNo ratings yet
- R448 Manual From Macfarlane GeneratorsDocument14 pagesR448 Manual From Macfarlane Generatorsabuzer1981No ratings yet
- SS460 InstructionsDocument4 pagesSS460 InstructionsDiego Fernando Sanchez FlorezNo ratings yet
- XC3 PLC Manual de UsuarioDocument141 pagesXC3 PLC Manual de UsuarioEdú CárdenasNo ratings yet
- Failcodes NeanderDocument30 pagesFailcodes Neanderruizinho 1100% (1)
- Deep Sea Electronics PLC: DSE7110 MKII & DSE7120 MKII Operator ManualDocument100 pagesDeep Sea Electronics PLC: DSE7110 MKII & DSE7120 MKII Operator ManualKelvinNo ratings yet
- Schneider Altistart 48Document51 pagesSchneider Altistart 48Mas ChokyNo ratings yet
- Fault Code 196 (3-Wire Sensor) : Coolant Level Sensor 1 Circuit - Voltage Below Normal or Shorted To Low SourceDocument3 pagesFault Code 196 (3-Wire Sensor) : Coolant Level Sensor 1 Circuit - Voltage Below Normal or Shorted To Low SourceHamilton MirandaNo ratings yet
- Gu 304Document12 pagesGu 304Alejandro CastagnaNo ratings yet
- AVR R180 DatasheetDocument20 pagesAVR R180 Datasheetjean sanchezNo ratings yet
- CT365 CT400S (QSG12 50Hz)Document3 pagesCT365 CT400S (QSG12 50Hz)Md ShNo ratings yet
- Tad 532geDocument2 pagesTad 532geHumberto Carrasco Gutierrez100% (1)
- 2.a. Electric Fire Pump ControllerDocument12 pages2.a. Electric Fire Pump ControllerNOMANNo ratings yet
- Installation and Operation Manual: Proact™ Ii Electric Powered Actuator and DriverDocument32 pagesInstallation and Operation Manual: Proact™ Ii Electric Powered Actuator and DriverDjebali MouradNo ratings yet
- HX7 ASD Prog and Op Manual 2642Document196 pagesHX7 ASD Prog and Op Manual 2642LuchoNo ratings yet
- Rehs3668 Instalacion VR6Document10 pagesRehs3668 Instalacion VR6julio cesarNo ratings yet
- Alarma Inteligente - EyeSiteDocument5 pagesAlarma Inteligente - EyeSiteMarco Antonio AlejoNo ratings yet
- Features Description: Deep Sea Electronics Amf and InstrumentationDocument4 pagesFeatures Description: Deep Sea Electronics Amf and Instrumentationabduallah muhammad100% (1)
- Bac06 Series (BAC06A/BAC06V) Switch-Type Battery Charger: User ManualDocument6 pagesBac06 Series (BAC06A/BAC06V) Switch-Type Battery Charger: User ManualJermaine PeñaNo ratings yet
- Sices GC315Document4 pagesSices GC315Mahmoud ElbakryNo ratings yet
- COMAP IL-MRS11-16 Thong So Ky Thuat PDFDocument2 pagesCOMAP IL-MRS11-16 Thong So Ky Thuat PDFthanhhai31No ratings yet
- Kongsberg Electronic Hand ControlDocument4 pagesKongsberg Electronic Hand ControltstkupdhNo ratings yet
- Kit NEXYS To APM303 - Install Procedure-EnglishDocument7 pagesKit NEXYS To APM303 - Install Procedure-Englishzawmintun zpeNo ratings yet
- Automatic Engine Control For John Deere: Ecu-Can70BcDocument2 pagesAutomatic Engine Control For John Deere: Ecu-Can70BcCarlos Andrés Marín ArcosNo ratings yet
- Wiring Diagrams: VR6 Voltage RegulatorDocument21 pagesWiring Diagrams: VR6 Voltage Regulatorgeorgi15685No ratings yet
- LXC706 V1.0 en User ManualDocument16 pagesLXC706 V1.0 en User ManualAnonymous vqsuRyNo ratings yet
- DSE7310 DSE7320 Data Sheet PDFDocument2 pagesDSE7310 DSE7320 Data Sheet PDFlony811No ratings yet
- 7mbi100u4s 120B 54Document1 page7mbi100u4s 120B 54SLAMET PAMBUDI0% (1)
- DSE892 SNMP Gateway Operator ManualDocument42 pagesDSE892 SNMP Gateway Operator ManualpevareNo ratings yet
- S287 Fozmula Capacitance Coolant Level Switch Data JP 24 Nov 15 3.2 Rev 2Document1 pageS287 Fozmula Capacitance Coolant Level Switch Data JP 24 Nov 15 3.2 Rev 2Parinya0% (1)
- Entrelec Single Function Timers PDFDocument105 pagesEntrelec Single Function Timers PDFembasianNo ratings yet
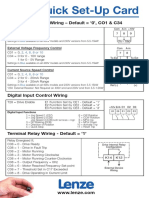
- Lenze SMD Quick SetupDocument2 pagesLenze SMD Quick SetupJovica ČukuranovićNo ratings yet
- EGCP 3 Installation Manual en TechManDocument122 pagesEGCP 3 Installation Manual en TechManoscarafonsoNo ratings yet
- Eng Cont AuxiliaryDocument35 pagesEng Cont AuxiliaryagvassNo ratings yet
- Manual EA20S CaterpillarDocument3 pagesManual EA20S CaterpillarHernán Peñafiel ReaNo ratings yet
- Trans-Auto Eng Man v16Document77 pagesTrans-Auto Eng Man v16asif MehmoodNo ratings yet
- SDMO Telys 2 Control - Original SDMO Control From FranceDocument5 pagesSDMO Telys 2 Control - Original SDMO Control From FranceDarnell GracenNo ratings yet
- EN Spare Parts ManualDocument24 pagesEN Spare Parts ManualSerkanAlNo ratings yet
- DSE710Document26 pagesDSE710Muhammad Umer Adnan33% (3)
- Edan Instruments, Inc: Manual Ver: 1.3 Release Date: Oct. 2009 Part Number: MS1R-110286-1.3Document125 pagesEdan Instruments, Inc: Manual Ver: 1.3 Release Date: Oct. 2009 Part Number: MS1R-110286-1.3DR. NAZNIN MOMTAZNo ratings yet
- Siklu Eh-1200 Install & User Manual - Eh-Instl-02 - Issue3 (June 2012)Document221 pagesSiklu Eh-1200 Install & User Manual - Eh-Instl-02 - Issue3 (June 2012)rususer77No ratings yet
- Sem 20180426 Ats Iem FL1Document2 pagesSem 20180426 Ats Iem FL1Choco Mila BeidinNo ratings yet
- Excess Carriers in SemiconductorsDocument36 pagesExcess Carriers in SemiconductorsKOKONo ratings yet
- Switchyard Energizing: Personal Protective EquipmentDocument5 pagesSwitchyard Energizing: Personal Protective EquipmentPatut Tua Parulian ButarbutarNo ratings yet
- Vector Shift ProtectionDocument15 pagesVector Shift Protectionkrajeev28No ratings yet
- Mcqwind and SolarDocument9 pagesMcqwind and SolarhananwarNo ratings yet
- Curva de Daño TransforamadorDocument6 pagesCurva de Daño Transforamadorjose perez0% (1)
- BELDEN 4x18 9418 - TechdataDocument2 pagesBELDEN 4x18 9418 - TechdataEduardo CalvaNo ratings yet
- D5A High-Precision SwitchDocument8 pagesD5A High-Precision SwitchMuhamad PriyatnaNo ratings yet
- Panaray MB4 Modular Bass Loudspeaker: General DescriptionDocument2 pagesPanaray MB4 Modular Bass Loudspeaker: General DescriptionVishal SuryawaniNo ratings yet
- Kendriya Vidyalaya Sangathan Kolkata Region Pre-Board Examination 2020-21 Class - Xii Subject:PhysicsDocument7 pagesKendriya Vidyalaya Sangathan Kolkata Region Pre-Board Examination 2020-21 Class - Xii Subject:PhysicsShivankar PandeyNo ratings yet
- Syllabus - BE EEE (Regular) ('15)Document92 pagesSyllabus - BE EEE (Regular) ('15)Venkat PrakashNo ratings yet
- International VT-275 2006 Engine Catalog 4-20-06Document76 pagesInternational VT-275 2006 Engine Catalog 4-20-06C Pazo Alonso90% (10)
- Tracking and Erosion Properties Evaluation of Polymeric Insulating MaterialsDocument5 pagesTracking and Erosion Properties Evaluation of Polymeric Insulating MaterialsPrateek DavidNo ratings yet
- LF280 (3.2V 280ah) Product Specification (Version E) - 2019.7.5Document14 pagesLF280 (3.2V 280ah) Product Specification (Version E) - 2019.7.5data shifterNo ratings yet
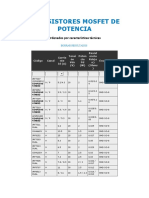
- Transistores Mosfet de PotenciaDocument15 pagesTransistores Mosfet de PotenciaLuis SanchezNo ratings yet
- FX33 SchematicDocument3 pagesFX33 SchematicDavid BørresenNo ratings yet
- Decroly, L. Laurent, J. C. Lienard, G. Marechal, J. Vorobeitchik - Parametric Amplifiers-Macmillan Education UK (1973)Document461 pagesDecroly, L. Laurent, J. C. Lienard, G. Marechal, J. Vorobeitchik - Parametric Amplifiers-Macmillan Education UK (1973)Victoria StratanNo ratings yet
- LM195 - LM395Document16 pagesLM195 - LM395Juan José Suárez YupanquiNo ratings yet
- Industrial Training Report-ContentsDocument10 pagesIndustrial Training Report-ContentsNuwan BandaraNo ratings yet
- Spec 00492Document2 pagesSpec 00492putrasejahtraNo ratings yet
- Pixsys ATR 121-141Document80 pagesPixsys ATR 121-141Aymen ZammaliNo ratings yet
- Speed Control of Induction MotorDocument33 pagesSpeed Control of Induction MotorMaham NaeemNo ratings yet
- Datasheet IMP06160230P25A-FarasisEnergyDocument1 pageDatasheet IMP06160230P25A-FarasisEnergyÁlvaro Satué CrespoNo ratings yet
- Lab Report MarchDocument4 pagesLab Report MarchTom EnglishNo ratings yet
- Literature Review (VFinal) BehrJDocument9 pagesLiterature Review (VFinal) BehrJKolya MayoNo ratings yet
- Ke300x MR V3.00 e PDFDocument185 pagesKe300x MR V3.00 e PDFsteve yamamotoNo ratings yet
- Analog and Digital Communication, 2016 PDFDocument559 pagesAnalog and Digital Communication, 2016 PDFSalvador Alcaraz100% (2)
- A New Multiphase Rotor Model For The Squirrel Cage Rotor of A Six-Phase Induction MachineDocument7 pagesA New Multiphase Rotor Model For The Squirrel Cage Rotor of A Six-Phase Induction MachineMoyasserengAlattarNo ratings yet
- LAB2 BJT Biasing 15Document7 pagesLAB2 BJT Biasing 15hasyikinNo ratings yet
- E-Bike Using Wireless Charging and Split Battery With Renewable EnergyDocument8 pagesE-Bike Using Wireless Charging and Split Battery With Renewable Energytuketoo worksNo ratings yet