You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Chai Shen ASCEPaperDocument9 pagesChai Shen ASCEPaperWilliam ChongNo ratings yet
- SHAKE2000: Quick TutorialDocument154 pagesSHAKE2000: Quick TutorialTharach JanesuapasaereeNo ratings yet
- Practical Tunnel Lining ExampleDocument67 pagesPractical Tunnel Lining ExampleSupreeth PrasannaNo ratings yet
- Improving The Capacity of Bored Piles by Shaft Grouting Shaft GroutingDocument29 pagesImproving The Capacity of Bored Piles by Shaft Grouting Shaft GroutingWilliam ChongNo ratings yet
- PLAXIS Implementation of Hypoplasticity: David Ma S InDocument29 pagesPLAXIS Implementation of Hypoplasticity: David Ma S InJoshua SNo ratings yet
- Seismic Pore Water Pressure Relief Wells For GraveDocument19 pagesSeismic Pore Water Pressure Relief Wells For GraveWilliam ChongNo ratings yet
- Tesis - Procedures For Estimating Earthquake Induced DisplacementsDocument159 pagesTesis - Procedures For Estimating Earthquake Induced DisplacementsCesar Romero OscamaytaNo ratings yet
- Comparison of Pseudo-Static and Pseudo-Dynamic Methods On WallsDocument9 pagesComparison of Pseudo-Static and Pseudo-Dynamic Methods On WallsWilliam ChongNo ratings yet
- Segmental Ring Design: New Challenges With High Tunnel DiametersDocument16 pagesSegmental Ring Design: New Challenges With High Tunnel Diametersjerrin jose sajanNo ratings yet
- 04b Anexo Ecuaciones Empíricas DetmerDocument9 pages04b Anexo Ecuaciones Empíricas DetmerHugo TapiaNo ratings yet
- 2013 Soil Heave Due To Pile DrivingDocument20 pages2013 Soil Heave Due To Pile DrivingWilliam ChongNo ratings yet
- K - 0621 3200492A-UNOPS-DC-G-22 Liquefaction AssessmentDocument22 pagesK - 0621 3200492A-UNOPS-DC-G-22 Liquefaction AssessmentWilliam ChongNo ratings yet
- Comparison of Pseudo-Static and Pseudo-Dynamic Methods On WallsDocument9 pagesComparison of Pseudo-Static and Pseudo-Dynamic Methods On WallsWilliam ChongNo ratings yet
- Shear Strength in The New Eurocode 2. A Step ForwardDocument10 pagesShear Strength in The New Eurocode 2. A Step ForwardChineseAssassinNo ratings yet
- GEC No 3 LRFD Seismic Design and AnalysisDocument588 pagesGEC No 3 LRFD Seismic Design and Analysisrshaghayan100% (1)
- PM4Sand Model Approximates Sand Behavior Under Varied ConditionsDocument113 pagesPM4Sand Model Approximates Sand Behavior Under Varied ConditionsJorge CarrilloNo ratings yet
- BJKGJHGDocument164 pagesBJKGJHGMuhammad FarisNo ratings yet
- Protection of Undergrd CableDocument26 pagesProtection of Undergrd CableWilliam ChongNo ratings yet
- Observations of hydraulic fracturing in soils through field testing & simulationsDocument77 pagesObservations of hydraulic fracturing in soils through field testing & simulationsWilliam ChongNo ratings yet
- Comparing Drainage Elements in PLAXIS 2D and 3D for Consolidating ClayDocument8 pagesComparing Drainage Elements in PLAXIS 2D and 3D for Consolidating ClayWilliam ChongNo ratings yet
- Arup - Total Design Over Time PDFDocument75 pagesArup - Total Design Over Time PDFWilliam ChongNo ratings yet
- 2009 WichtmannDocument13 pages2009 WichtmannPaul Pinedo VilcahuamánNo ratings yet
- AECOM Q1 FY18 Earnings WebdeckDocument20 pagesAECOM Q1 FY18 Earnings WebdeckWilliam ChongNo ratings yet
- Ground Modification Methods VOLIIDocument550 pagesGround Modification Methods VOLIIPeteris SkelsNo ratings yet
- Jacking Pipe DesignDocument15 pagesJacking Pipe DesignEWheelerFKNo ratings yet
- 7-1972w Slurry Trench StudenterlundDocument1 page7-1972w Slurry Trench StudenterlundWilliam ChongNo ratings yet
- Guidelines For Storage and Handling Bluescope Steel 'S ProductsDocument20 pagesGuidelines For Storage and Handling Bluescope Steel 'S ProductsElieser Júnio100% (1)
- PM4Sand Model Approximates Sand Behavior Under Varied ConditionsDocument113 pagesPM4Sand Model Approximates Sand Behavior Under Varied ConditionsJorge CarrilloNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 3500-25 Enhanced Keyphasor Module Datasheet - 141532Document8 pages3500-25 Enhanced Keyphasor Module Datasheet - 141532Erick SánchezNo ratings yet
- LAPSE DOMAIN SOLUTIONSDocument24 pagesLAPSE DOMAIN SOLUTIONSscribideNo ratings yet
- Lesson 2 Inertial Navigation Systems/ Inertial Reference SystemsDocument31 pagesLesson 2 Inertial Navigation Systems/ Inertial Reference SystemsadexNo ratings yet
- 12SP Frames and Machines SampleProblemsDocument20 pages12SP Frames and Machines SampleProblemsSebastiàn RugelesNo ratings yet
- Lab 02Document4 pagesLab 02CookiesNo ratings yet
- 1.1 Exponents PracticeDocument7 pages1.1 Exponents Practicesophia onuNo ratings yet
- Fm/Am Radio Ic: CD2003GP/GBDocument7 pagesFm/Am Radio Ic: CD2003GP/GBМаксим МульгинNo ratings yet
- EV 100 Service Manual PDFDocument31 pagesEV 100 Service Manual PDFDmitriy Shevchenko100% (1)
- Manufacturing Process - 2: Sot, PdpuDocument114 pagesManufacturing Process - 2: Sot, PdpuDipen KNo ratings yet
- Testing of soft foams: Market, Strength, Standards and PracticeDocument53 pagesTesting of soft foams: Market, Strength, Standards and PracticeGustavo LealNo ratings yet
- PIPE AND TUBE - Comparison of SpecificationsDocument4 pagesPIPE AND TUBE - Comparison of Specificationsnate anantathatNo ratings yet
- Spincel 5 plus-URIT-5380 Service ManualDocument57 pagesSpincel 5 plus-URIT-5380 Service ManualSergey Suldin100% (5)
- Off Center Load Cell Type Sup1Document3 pagesOff Center Load Cell Type Sup1camiloNo ratings yet
- EXP6 -star-delta - المعدلةDocument4 pagesEXP6 -star-delta - المعدلةAli AltahirNo ratings yet
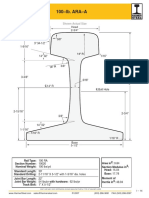
- 100 Lb-Yd ARA-ADocument1 page100 Lb-Yd ARA-ADario Bravo BordaNo ratings yet
- VX Spectra 19mm Metrological Performance - 6620824 - 01Document10 pagesVX Spectra 19mm Metrological Performance - 6620824 - 01FredyNo ratings yet
- Chem 120 Exam ReviewDocument10 pagesChem 120 Exam ReviewRazan AliNo ratings yet
- Dynamics - Chapter-13Document3 pagesDynamics - Chapter-13TANJILUR RAHMAN 1909011No ratings yet
- 0508-10 Centrifugal CleanersDocument13 pages0508-10 Centrifugal CleanersbgpinuNo ratings yet
- 02 Introduction To Sample PreparationDocument53 pages02 Introduction To Sample PreparationAri YusliandiNo ratings yet
- Analytical GeometryDocument93 pagesAnalytical GeometryBensonNo ratings yet
- Low Voltage Alternator - 4 Pole: 400V - 50 HZ / 480V - 60 HZ Electrical and Mechanical DataDocument12 pagesLow Voltage Alternator - 4 Pole: 400V - 50 HZ / 480V - 60 HZ Electrical and Mechanical Dataمحمود المستكاويNo ratings yet
- Fese2 ProcedureDocument4 pagesFese2 ProcedureZayn曾子豪No ratings yet
- Coulomb's LawDocument4 pagesCoulomb's LawPeterCiezczakNo ratings yet
- LOGIC SeriesDocument2 pagesLOGIC SeriesJosueFerreiraNo ratings yet
- Heat-1 DPP-1-12 Sol. .p65Document24 pagesHeat-1 DPP-1-12 Sol. .p65Avijeet kumar MishraNo ratings yet
- ! Theory of Surface Plasmons and Surface-Plasmon Polaritons PDFDocument54 pages! Theory of Surface Plasmons and Surface-Plasmon Polaritons PDFOlshansky OlegNo ratings yet
- Frequency Response Analysis of Power SystemsDocument2 pagesFrequency Response Analysis of Power SystemsKarmughillaan Manimaran100% (1)
- Instruction Manual For Mig/Mag (Co2) Welding Machine: Warpp Engineers Pvt. LTDDocument14 pagesInstruction Manual For Mig/Mag (Co2) Welding Machine: Warpp Engineers Pvt. LTDchristopher ng'ang'a kamauNo ratings yet
- A Level Physics Flying Start GuideDocument9 pagesA Level Physics Flying Start GuideNiall QuadrosNo ratings yet