You might also like
- Technical Note: What Is A VFD?Document4 pagesTechnical Note: What Is A VFD?mdkhandaveNo ratings yet
- Variable Frequency DriveDocument12 pagesVariable Frequency Drive-Danielle DimitrovaNo ratings yet
- VFD Rebate Dsire: What Is A VFD?Document35 pagesVFD Rebate Dsire: What Is A VFD?Stephen Rey CaldeaNo ratings yet
- Figure 1. Simple VFD / Fan ApplicationDocument7 pagesFigure 1. Simple VFD / Fan ApplicationTapas PalNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- What Is A Variable Frequency Drive? How Does A VFD Work?Document6 pagesWhat Is A Variable Frequency Drive? How Does A VFD Work?S.M.Touhidur RahmanNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- Electric Drives: Drive BasicsDocument5 pagesElectric Drives: Drive BasicsJisha KuruvillaNo ratings yet
- Variable Frecuency Drives For Fans PDFDocument15 pagesVariable Frecuency Drives For Fans PDFReyes SanchezNo ratings yet
- DC Shunt Motor - Speed Control & Characteristics - Electrical4U PDFDocument4 pagesDC Shunt Motor - Speed Control & Characteristics - Electrical4U PDFIvica IndjinNo ratings yet
- Assignment MachineDocument8 pagesAssignment MachineNur AfiqahNo ratings yet
- Met Final 2024Document18 pagesMet Final 2024chalaNo ratings yet
- Uno R3 Dengan Tampilan LCD: Pengaturan Kecepatan Putaran Motor DC Menggunakan ArduinoDocument9 pagesUno R3 Dengan Tampilan LCD: Pengaturan Kecepatan Putaran Motor DC Menggunakan ArduinoAgus SukmanaNo ratings yet
- BLDC Motor With Speed Control With RPM DisplayDocument16 pagesBLDC Motor With Speed Control With RPM DisplayVõ Đức HuyNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Ac Drive (Simple Theory To Understand) By: Nitish DhawanDocument10 pagesAc Drive (Simple Theory To Understand) By: Nitish DhawanNitish DhawanNo ratings yet
- AC Drives and Soft Starter Application Guide - AllenBradleyCoDocument5 pagesAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- Basic Construction and Working of A DC GeneratorDocument7 pagesBasic Construction and Working of A DC GeneratorGlen Howell PanesNo ratings yet
- Advantages Vs DisadvantagesDocument5 pagesAdvantages Vs DisadvantagesAnuar PadeliNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Name: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CDocument7 pagesName: Maturan, Renz Myko B. Date: November 28, 2022 Subject & Section: EE 330 AC/DC Machineries - CRenz MykoNo ratings yet
- Brushless DC BLDC Motor FundamentalsDocument8 pagesBrushless DC BLDC Motor FundamentalsgbksnNo ratings yet
- Lab Rep DraftDocument5 pagesLab Rep DraftKent Orriele FadriquelNo ratings yet
- 325 10 DC Motors Generators ADocument47 pages325 10 DC Motors Generators Ahavvan962No ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- Module 3 - Shunt DC MotorDocument12 pagesModule 3 - Shunt DC MotorMARY JOY MAGAWAYNo ratings yet
- 2000 Control ArticlesDocument29 pages2000 Control ArticlesPepe MeléndezNo ratings yet
- Rewinding GeneratorsDocument4 pagesRewinding GeneratorsSherehan ShawkatNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Drives and SoftstarterDocument7 pagesDrives and SoftstarterElectrification100% (1)
- Brushless DC Electric Motor - Wikipedia, The Free EncyclopediaDocument14 pagesBrushless DC Electric Motor - Wikipedia, The Free EncyclopediaSailesh ReddyNo ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Understanding Generator Ripple WaveformsDocument41 pagesUnderstanding Generator Ripple WaveformsX NaterionNo ratings yet
- Generator Exciter & Voltage ExciterDocument34 pagesGenerator Exciter & Voltage ExciterYasir MehmoodNo ratings yet
- Reasons For Using Star Connected Armature Winding in AlternatorDocument13 pagesReasons For Using Star Connected Armature Winding in AlternatorAdisu ZinabuNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Direct Vs Alternating Current: BelowDocument5 pagesDirect Vs Alternating Current: Belowtgs100No ratings yet
- Stepper and Servo MotorDocument5 pagesStepper and Servo Motorகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- The Truth About Five Common VFD MythsDocument6 pagesThe Truth About Five Common VFD MythspaniyaNo ratings yet
- Speed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControllerDocument8 pagesSpeed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControlleradilNo ratings yet
- Permanent Magnet Brushless DC MotorDocument7 pagesPermanent Magnet Brushless DC MotoratultiwarihinduNo ratings yet
- Assignment 2 Ac DCDocument15 pagesAssignment 2 Ac DCVincoy JohnlloydNo ratings yet
- Brushless DC MotorsDocument7 pagesBrushless DC MotorsRonald LugwireNo ratings yet
- Power Analysis of PWM Motor Drives PDFDocument22 pagesPower Analysis of PWM Motor Drives PDFJaime Vanegas IriarteNo ratings yet
- Motors and DrivesDocument23 pagesMotors and DrivesharishkumarsinghNo ratings yet
- Motors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsDocument1 pageMotors and Loads: 3.3 Synchronous Motors 3.4 Direct Current Motors Commonly Named DC MotorsHoon MiewJieNo ratings yet
- Working Applications of Direct Current DC Shunt MotorDocument2 pagesWorking Applications of Direct Current DC Shunt Motorfahad pirzadaNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Akshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)Document13 pagesAkshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)zilanimeisterNo ratings yet
- PWM Based DC Motor Speed ControlDocument76 pagesPWM Based DC Motor Speed ControlEr Meghvrat AryaNo ratings yet
- EE Assignent No. 2Document11 pagesEE Assignent No. 2Noor FatimaNo ratings yet
- Rhapsody Fault Finding IZ132-5Document11 pagesRhapsody Fault Finding IZ132-5Jibjab7No ratings yet
- VACOn Fault Finding GuideDocument16 pagesVACOn Fault Finding GuideJibjab7No ratings yet
- Express Nomenclature Pocket BookDocument21 pagesExpress Nomenclature Pocket BookJibjab7100% (1)
- Motor Shaft Voltages & Bearing CurrentsDocument6 pagesMotor Shaft Voltages & Bearing CurrentsJibjab7No ratings yet
- A2 Drive Nut ReplacementDocument7 pagesA2 Drive Nut ReplacementJibjab7100% (1)
- KALEA-A2 Inspection ManualDocument26 pagesKALEA-A2 Inspection ManualJibjab7100% (2)
- II091 - Horiz & Vert ULSs With Parallel InputsDocument4 pagesII091 - Horiz & Vert ULSs With Parallel InputsJibjab7No ratings yet
- MPK40 BasicDocument31 pagesMPK40 BasicJibjab7No ratings yet
- Replacing Motor-Generator Sets With Modern Static DC Drives: Trade PublicationDocument4 pagesReplacing Motor-Generator Sets With Modern Static DC Drives: Trade PublicationJibjab7No ratings yet
- Hand Pump InfoDocument2 pagesHand Pump InfoJibjab7No ratings yet
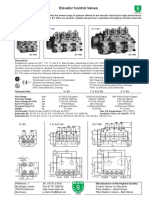
- Elevator Control Valves: EN ISO 9001Document6 pagesElevator Control Valves: EN ISO 9001Jibjab7No ratings yet
- PB128 - CH034 EncoderDocument2 pagesPB128 - CH034 EncoderJibjab7No ratings yet
- 1 Multipart xF8FF 4 TextDocument1 page1 Multipart xF8FF 4 TextJibjab7No ratings yet
- Installation and Setting Instructions: Horizontal and Vertical Position Indicator Units With Serial InputsDocument8 pagesInstallation and Setting Instructions: Horizontal and Vertical Position Indicator Units With Serial InputsJibjab7No ratings yet
- II092 - Horiz & Vert ULSs With Serial InputsDocument4 pagesII092 - Horiz & Vert ULSs With Serial InputsJibjab7No ratings yet
- LCD Position Indicator Display Unit Type UL60 MINI-LCDDocument2 pagesLCD Position Indicator Display Unit Type UL60 MINI-LCDJibjab7No ratings yet
- II097 - CH024 & CH034 Field Wiring InstrDocument2 pagesII097 - CH024 & CH034 Field Wiring InstrJibjab7No ratings yet
- PB151 - CJ50 Electronic GongDocument2 pagesPB151 - CJ50 Electronic GongJibjab7No ratings yet
- PB152 - CJ60 GongDocument2 pagesPB152 - CJ60 GongJibjab7No ratings yet
- Mock Test 7 Paper 2Document21 pagesMock Test 7 Paper 2Vinod Agrawal100% (1)
- The Big Misconception (Forces - Physics)Document5 pagesThe Big Misconception (Forces - Physics)Réginald Raymund Jérôme CaturzaNo ratings yet
- Acoustic ImpedanceDocument6 pagesAcoustic ImpedanceRoberto WallisNo ratings yet
- Transmission Lines ParametersDocument11 pagesTransmission Lines ParametersSwechhya kafleNo ratings yet
- LCA Lab Report 12Document12 pagesLCA Lab Report 12ayleeNo ratings yet
- Contactors and Contactor Assemblies: SiriusDocument16 pagesContactors and Contactor Assemblies: SiriuschochoroyNo ratings yet
- 1st Year E & M Problem Sheet 1Document3 pages1st Year E & M Problem Sheet 1vsinisa1No ratings yet
- Ee8353 QP2 PDFDocument7 pagesEe8353 QP2 PDFBhavani MurugesanNo ratings yet
- Homework 1-Engineering ElectromagneticDocument2 pagesHomework 1-Engineering ElectromagneticerfanghlmNo ratings yet
- SVKM J.V. Parekh International School Grade: VI Div: Subject: Physics Topic: Gravity Name of The Student: Roll NoDocument9 pagesSVKM J.V. Parekh International School Grade: VI Div: Subject: Physics Topic: Gravity Name of The Student: Roll NoWere WolfNo ratings yet
- PreviewDocument85 pagesPreviewalecsilveiraNo ratings yet
- CE 771 Lecture 1 Interaction PDFDocument13 pagesCE 771 Lecture 1 Interaction PDFVisharad GuptaNo ratings yet
- Unit1 - AC Commutator MotorsDocument13 pagesUnit1 - AC Commutator MotorsRishi Kant Sharma100% (1)
- Dave Lawton Replica of MeyeDocument6 pagesDave Lawton Replica of MeyeVlad AdrianNo ratings yet
- Alevel PhysicsDocument4 pagesAlevel PhysicsDora AyeNo ratings yet
- Transformer Test ReportDocument2 pagesTransformer Test ReportAhmad AlshammariNo ratings yet
- Manual MS300 PDFDocument688 pagesManual MS300 PDFEsmer Cruz SanchezNo ratings yet
- Experiences:: The 7Th Era of MarketingDocument34 pagesExperiences:: The 7Th Era of MarketingakselNo ratings yet
- 1 - Transport Phenomena IntroductionDocument80 pages1 - Transport Phenomena IntroductionYunardi YusufNo ratings yet
- Topic 2 - Mechanics - IB PhysicsDocument23 pagesTopic 2 - Mechanics - IB PhysicsAzzahra Yeasmin Saika100% (1)
- City College City of San Fernando, PampangaDocument18 pagesCity College City of San Fernando, PampangaJessa May MendozaNo ratings yet
- Inspection & Test Certificate Serial No: ....Document4 pagesInspection & Test Certificate Serial No: ....Somidu ChandimalNo ratings yet
- ANTHE-2020 - (IX Moving To X) - (Code-E) - 16-12-2020Document16 pagesANTHE-2020 - (IX Moving To X) - (Code-E) - 16-12-2020rajesh kumarNo ratings yet
- Mathieu Equation (Parametric Oscillator)Document6 pagesMathieu Equation (Parametric Oscillator)Rodrigo Mota AmaranteNo ratings yet
- Turnout Design IHHA 2015Document8 pagesTurnout Design IHHA 2015cheikh ahmedNo ratings yet
- XII Phy Mcqs Physic QuestionDocument53 pagesXII Phy Mcqs Physic QuestiondunconNo ratings yet
- PIEAS PAST Paper For BS StudentsDocument5 pagesPIEAS PAST Paper For BS Studentsm.ahadNo ratings yet
- Specification LV Capacitor BankDocument8 pagesSpecification LV Capacitor BankBhaskar DandapathakNo ratings yet
- PhysicsDocument2 pagesPhysicsapi-236544093No ratings yet
- Viva-Voce Electrical MachinesDocument2 pagesViva-Voce Electrical MachinesjishnusajiNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- The Homeowner's DIY Guide to Electrical WiringFrom EverandThe Homeowner's DIY Guide to Electrical WiringRating: 5 out of 5 stars5/5 (2)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesFrom EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesRating: 3.5 out of 5 stars3.5/5 (3)
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Cleanroom Technology: Fundamentals of Design, Testing and OperationFrom EverandCleanroom Technology: Fundamentals of Design, Testing and OperationNo ratings yet
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- THE LTSPICE XVII SIMULATOR: Commands and ApplicationsFrom EverandTHE LTSPICE XVII SIMULATOR: Commands and ApplicationsRating: 5 out of 5 stars5/5 (1)
- Beginner's Guide to Reading Schematics, Fourth EditionFrom EverandBeginner's Guide to Reading Schematics, Fourth EditionRating: 3.5 out of 5 stars3.5/5 (10)
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- The Ultimate Solar Power Design Guide Less Theory More PracticeFrom EverandThe Ultimate Solar Power Design Guide Less Theory More PracticeRating: 4.5 out of 5 stars4.5/5 (10)
- Build Your Own Electronics WorkshopFrom EverandBuild Your Own Electronics WorkshopRating: 3.5 out of 5 stars3.5/5 (3)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)