You might also like
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocument8 pagesField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Power Systems Modelling and Fault Analysis: Theory and PracticeFrom EverandPower Systems Modelling and Fault Analysis: Theory and PracticeRating: 2 out of 5 stars2/5 (1)
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Sequence Prediction of Firing Angle BLDC Motor Drive Using Lookup TableDocument8 pagesSequence Prediction of Firing Angle BLDC Motor Drive Using Lookup TableEditor IJTSRDNo ratings yet
- Modeling and Simulation of BLDC Motor Using Soft Computing TechniquesDocument5 pagesModeling and Simulation of BLDC Motor Using Soft Computing TechniquesJulián Peláez RestrepoNo ratings yet
- Brushless DC MotorsDocument21 pagesBrushless DC MotorsSRL MECHNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocument4 pagesAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952No ratings yet
- DocumentDocument7 pagesDocumentakhilnandanNo ratings yet
- 2208EE006.ourside Fuzzy LogicDocument6 pages2208EE006.ourside Fuzzy LogicssNo ratings yet
- Fuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorDocument5 pagesFuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorijtetjournalNo ratings yet
- Control of BLDC Motor Using dsPIC30F2010 Final Year ProjectDocument54 pagesControl of BLDC Motor Using dsPIC30F2010 Final Year ProjectShreyankh Krishy50% (2)
- Brushless DC MotorDocument22 pagesBrushless DC MotorPhilip I. Ay-AdNo ratings yet
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- Speed Control of BLDC Motor Using Fuzzy Logic IJERTCONV5IS01120Document4 pagesSpeed Control of BLDC Motor Using Fuzzy Logic IJERTCONV5IS01120SirichandanaNo ratings yet
- Module 5 ElectricalDocument22 pagesModule 5 ElectricalSKANDAN BHARADWAJNo ratings yet
- Implementing Embedded Speed Control For Brushless DC Motors Part1Document8 pagesImplementing Embedded Speed Control For Brushless DC Motors Part1charliesteven100% (2)
- 10 Chapter 2Document39 pages10 Chapter 2itstutan_749916692No ratings yet
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Implementation of Brushless DC Motor Speed Control PDFDocument7 pagesImplementation of Brushless DC Motor Speed Control PDFDane DaneNo ratings yet
- Multipurpose Machines Using Scotch Yoke MechanismDocument36 pagesMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- BLDC Brushless DC MotorDocument22 pagesBLDC Brushless DC MotorNyn SoniNo ratings yet
- Position Tracking System With Brushless DC Motor: Keywords: BLDC Motor Hall Sensors PID ControllerDocument5 pagesPosition Tracking System With Brushless DC Motor: Keywords: BLDC Motor Hall Sensors PID ControllerMyat AungNo ratings yet
- Stepper MotorDocument16 pagesStepper MotorpaviliondmNo ratings yet
- Speed Control For Brushless DC MotorsDocument50 pagesSpeed Control For Brushless DC MotorsMiladShahabiNo ratings yet
- Permanent Magnet Brushless DC MotorDocument7 pagesPermanent Magnet Brushless DC MotoratultiwarihinduNo ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- Electric Drives - Brushless DC and Reluctance MotorsDocument5 pagesElectric Drives - Brushless DC and Reluctance Motorsfauzi endraNo ratings yet
- Design of Electronic Speed Controller of Brushless DC Motor: Abstract-This Paper Discusses The Construction andDocument3 pagesDesign of Electronic Speed Controller of Brushless DC Motor: Abstract-This Paper Discusses The Construction andMuhammad AhsanNo ratings yet
- Performance Comparison of A Sensorless PMBLDC Motor Drive System With Conventional and Fuzzy Logic ControllersDocument9 pagesPerformance Comparison of A Sensorless PMBLDC Motor Drive System With Conventional and Fuzzy Logic ControllersSivan RajNo ratings yet
- Speed Control of Brushless DC Motor Using Conventional ControllersDocument9 pagesSpeed Control of Brushless DC Motor Using Conventional ControllersMuhdnursalam ZolkepliNo ratings yet
- Brushless DC MotorDocument6 pagesBrushless DC MotorAnonymous MAit3mlYm100% (1)
- Modelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/SimulinkDocument6 pagesModelling and Simulation of Three Phase BLDC Motor For Electric Braking Using Matlab/Simulinkadane gashuNo ratings yet
- KiranDocument20 pagesKiranabhishek mNo ratings yet
- Brushless DC MotorsDocument6 pagesBrushless DC Motorssheela lNo ratings yet
- Speed Control of Brushless DC Motor: A Comparative Study: Neethu U. and Jisha V. RDocument5 pagesSpeed Control of Brushless DC Motor: A Comparative Study: Neethu U. and Jisha V. Rkishan kharelNo ratings yet
- DC BrushlessDocument8 pagesDC BrushlessMC ANo ratings yet
- Seminar Report5Document17 pagesSeminar Report5abhishek mNo ratings yet
- Identification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIdentification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerJurgen CokuNo ratings yet
- Sensorless Speed Control of Brushless DCDocument5 pagesSensorless Speed Control of Brushless DCekrem kayaNo ratings yet
- Content ServerDocument19 pagesContent ServerGerSon GUerra Chango IIINo ratings yet
- BLDC MotorDocument8 pagesBLDC MotorMahlet MelesseNo ratings yet
- Speed Control of 3 Phase Ac Induction Motor Using Micro 2407Document58 pagesSpeed Control of 3 Phase Ac Induction Motor Using Micro 2407sundarspace100% (2)
- Lit ReviewDocument4 pagesLit ReviewUgwu ArinzeNo ratings yet
- BLDC PDFDocument36 pagesBLDC PDFZariz ZakianNo ratings yet
- Basic BLDC ControllerDocument9 pagesBasic BLDC ControllerRen KiyoshiiNo ratings yet
- Design of A Brushless DC (BLDC) Motor Controller: April 2014Document7 pagesDesign of A Brushless DC (BLDC) Motor Controller: April 2014Janet WaldeNo ratings yet
- Eee-233 R1Document14 pagesEee-233 R1ArifNo ratings yet
- BLDC Motor : Brush Less DC MotorDocument11 pagesBLDC Motor : Brush Less DC MotorVARSHAN MOHAN0% (1)
- DC Motor Modeling and Control Using Backstepping Technique p01 12Document12 pagesDC Motor Modeling and Control Using Backstepping Technique p01 12Ali AltahirNo ratings yet
- Harmonic Analysis of DFIG Wind TurbineDocument11 pagesHarmonic Analysis of DFIG Wind TurbineInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetNo ratings yet
- 5sensorlessBLDC PDFDocument7 pages5sensorlessBLDC PDFAlex CastilloNo ratings yet
- Digital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsDocument9 pagesDigital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsGhada DahmoulNo ratings yet
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDocument8 pagesHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology Incadil100% (1)
- Low Power Design Using Picmicro™ Microcontrollers: Using An External Resistor To Lower Power in RC ModeDocument17 pagesLow Power Design Using Picmicro™ Microcontrollers: Using An External Resistor To Lower Power in RC ModeadilNo ratings yet
- Digital 10Document23 pagesDigital 10adilNo ratings yet
- Logic Powered Serial Eeproms: Parameter ConditionsDocument11 pagesLogic Powered Serial Eeproms: Parameter ConditionsadilNo ratings yet
- The Picmicro Mcu As An Ieee 1451.2 Compatible Smart Transducer Interface Module (Stim)Document63 pagesThe Picmicro Mcu As An Ieee 1451.2 Compatible Smart Transducer Interface Module (Stim)adilNo ratings yet
- PICMASTER Support of Microsoft Windows DDEDocument6 pagesPICMASTER Support of Microsoft Windows DDEadilNo ratings yet
- Resistance and Capacitance Meter Using A PIC16C622: Device Program Memory Data MemoryDocument36 pagesResistance and Capacitance Meter Using A PIC16C622: Device Program Memory Data MemoryadilNo ratings yet
- Interfacing 93Cx6 Serial Eeproms To Pic16C5X MicrocontrollersDocument25 pagesInterfacing 93Cx6 Serial Eeproms To Pic16C5X MicrocontrollersadilNo ratings yet
- Implementing A Table Read: ImplementationDocument5 pagesImplementing A Table Read: ImplementationadilNo ratings yet
- Measuring Temperature Using The Watchdog Timer (WDT) : TheoryDocument18 pagesMeasuring Temperature Using The Watchdog Timer (WDT) : TheoryadilNo ratings yet
- المرشحات الرقمية الخطيةDocument20 pagesالمرشحات الرقمية الخطيةadilNo ratings yet
- المرشحات التشابهية 2Document14 pagesالمرشحات التشابهية 2adilNo ratings yet
- المرشحات الرقميةDocument25 pagesالمرشحات الرقميةadilNo ratings yet
- Analog Filters (Iii) Chebyshev Filters: Drssrao Ece Department Villanova UniversityDocument14 pagesAnalog Filters (Iii) Chebyshev Filters: Drssrao Ece Department Villanova UniversityadilNo ratings yet
- ALLDATA Model of The CarDocument56 pagesALLDATA Model of The CaradilNo ratings yet
- المرشحات التشابهية 1Document9 pagesالمرشحات التشابهية 1adilNo ratings yet
- Digital Fundamentals: FloydDocument33 pagesDigital Fundamentals: FloydadilNo ratings yet
- Digital Fundamentals: FloydDocument16 pagesDigital Fundamentals: FloydadilNo ratings yet
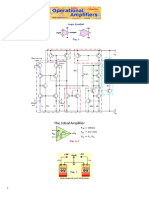
- The "Operational" Amplifier: Eng - Ahmed HeskolDocument27 pagesThe "Operational" Amplifier: Eng - Ahmed HeskoladilNo ratings yet
- Digital Fundamentals: FloydDocument21 pagesDigital Fundamentals: FloydadilNo ratings yet
- OP AmpDocument8 pagesOP AmpadilNo ratings yet
- Digital Fundamentals: FloydDocument15 pagesDigital Fundamentals: FloydadilNo ratings yet
- f37 Book Intarch Pres pt4Document89 pagesf37 Book Intarch Pres pt4adilNo ratings yet
- Digital Fundamentals: FloydDocument31 pagesDigital Fundamentals: FloydadilNo ratings yet
- Jan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1Document94 pagesJan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1adilNo ratings yet
- f37 Book Intarch Pres Pt6Document73 pagesf37 Book Intarch Pres Pt6adilNo ratings yet
- LCD HDM16016TSCDocument19 pagesLCD HDM16016TSCadilNo ratings yet
- f37 Book Intarch Pres pt1Document91 pagesf37 Book Intarch Pres pt1adilNo ratings yet
- The Tolerance Unless Classified 0.3mm: Outline Dimension & Block DiagramDocument1 pageThe Tolerance Unless Classified 0.3mm: Outline Dimension & Block DiagramadilNo ratings yet
- LCD - HDM64GS24CDocument19 pagesLCD - HDM64GS24CadilNo ratings yet
- M85001-0365 - Universal Input-Output Module MotherboardsDocument4 pagesM85001-0365 - Universal Input-Output Module Motherboardsafie pio pioNo ratings yet
- MG32 14FX 24 14FX DatasheetDocument3 pagesMG32 14FX 24 14FX Datasheetabvideo_379205515No ratings yet
- P6 Unit 16 - ExerciseDocument2 pagesP6 Unit 16 - ExerciseIvan Prasetya0% (1)
- 0960-0297 - I8 - 201706 Controlador PCC22100Document90 pages0960-0297 - I8 - 201706 Controlador PCC22100reycoeleNo ratings yet
- Jntu World: R05 Set No. 2Document8 pagesJntu World: R05 Set No. 2Samiullah MohammedNo ratings yet
- Cathodic Protection ReportDocument13 pagesCathodic Protection Reportjeedan78% (9)
- Cancellation of Unwanted Doppler Radar Sensor Motion Using Empirical Mode DecompositionDocument8 pagesCancellation of Unwanted Doppler Radar Sensor Motion Using Empirical Mode DecompositionJeong-geun KimNo ratings yet
- Faa StandartDocument13 pagesFaa StandartBagas SaputraNo ratings yet
- GENERATOR Ground FAULT ProtectionDocument17 pagesGENERATOR Ground FAULT Protectionsachin_vjti100% (2)
- Komar University of Science and Technology: Experiment #1: Ohm's LawDocument10 pagesKomar University of Science and Technology: Experiment #1: Ohm's LawfyffNo ratings yet
- How To Achieve Selective Coordination of Circuit Breakers - EEPDocument5 pagesHow To Achieve Selective Coordination of Circuit Breakers - EEPSandro CuetoNo ratings yet
- hk3370/hk3470 Service Manual: Harman/kardon Stereo ReceiverDocument123 pageshk3370/hk3470 Service Manual: Harman/kardon Stereo ReceiverBotelja VinaNo ratings yet
- BSR - Emerging Trends and Challenges Electric Power SystemsDocument118 pagesBSR - Emerging Trends and Challenges Electric Power SystemsPNo ratings yet
- P20 - 083 - AES Solutions Guide Updates - KL - r8 - Digital-V5a PDFDocument12 pagesP20 - 083 - AES Solutions Guide Updates - KL - r8 - Digital-V5a PDFad80083No ratings yet
- Engine Control Module (ECM) : PGMFI Training Modules OBD-II Training ModulesDocument6 pagesEngine Control Module (ECM) : PGMFI Training Modules OBD-II Training ModulesrayhanNo ratings yet
- Essl Price ListDocument15 pagesEssl Price Listsandy_jadhaoNo ratings yet
- Rcms2903-4E1-4Ge Multi-Service Fibermux: Raisecom Technology Co., LTDDocument4 pagesRcms2903-4E1-4Ge Multi-Service Fibermux: Raisecom Technology Co., LTDRaflyext BandungNo ratings yet
- 7SR51 Numerical Relay DatasheetDocument33 pages7SR51 Numerical Relay DatasheetSUSOVAN BISWAS100% (2)
- Lec ltm1160 5 1Document475 pagesLec ltm1160 5 1mohamed Abd ElhafeezNo ratings yet
- Presentation VLC SeminarDocument21 pagesPresentation VLC SeminarRethumon BabyNo ratings yet
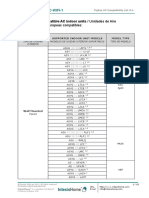
- IntesisHome FJ-RC-WIFI-1 Compatibility ListDocument15 pagesIntesisHome FJ-RC-WIFI-1 Compatibility ListFabian VázquezNo ratings yet
- Unit 2-2Document6 pagesUnit 2-2sivamuppalaneni29No ratings yet
- UuprogDocument1 pageUuprogjackass_tNo ratings yet
- Known Issues On Cisco 7600 Router ESDocument18 pagesKnown Issues On Cisco 7600 Router ESirozaNo ratings yet
- Eaton 5115 Tower ManualDocument44 pagesEaton 5115 Tower ManualVeselin AngelovNo ratings yet
- List Price: W.E.F. 12th January, 2021Document11 pagesList Price: W.E.F. 12th January, 2021usama zedanNo ratings yet
- Tower Mounted AmplifierDocument28 pagesTower Mounted AmplifierBrian A. MuhammadNo ratings yet
- Microwave Measurements: Gopi Chand Dasari M.TechDocument18 pagesMicrowave Measurements: Gopi Chand Dasari M.TechGopichand DasariNo ratings yet
- Bravo Tech BMB0900 Booster User ManualDocument28 pagesBravo Tech BMB0900 Booster User ManualJW PradanaNo ratings yet