You might also like
- Designofa Brushless DCBLDCMotor ControllerDocument7 pagesDesignofa Brushless DCBLDCMotor ControllerShubhzsNo ratings yet
- 305-149767815014-19Document6 pages305-149767815014-19adane gashuNo ratings yet
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- Implementing Embedded Speed Control For Brushless DC Motors Part1Document8 pagesImplementing Embedded Speed Control For Brushless DC Motors Part1charliesteven100% (2)
- Speed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControllerDocument8 pagesSpeed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControlleradilNo ratings yet
- Modeling and Simulation of BLDC Motor Using Soft Computing TechniquesDocument5 pagesModeling and Simulation of BLDC Motor Using Soft Computing TechniquesJulián Peláez RestrepoNo ratings yet
- Speed Control For Brushless DC MotorsDocument50 pagesSpeed Control For Brushless DC MotorsMiladShahabiNo ratings yet
- Stepper MotorDocument16 pagesStepper MotorpaviliondmNo ratings yet
- Design, Code Generation and Simulation of A BLDC Motor Controller Usuuing PIC MicrocontrollerDocument6 pagesDesign, Code Generation and Simulation of A BLDC Motor Controller Usuuing PIC MicrocontrollerThắng Nguyễn KhắcNo ratings yet
- Brushless DC MotorsDocument6 pagesBrushless DC Motorssheela lNo ratings yet
- Brushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterDocument9 pagesBrushless DC Electric Motor Speed Control and Power Factor Correction Using Single Ended Primary Inductor ConverterAlvaajid SaleemNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- Alternating Current (Ac) Electrical MachineDocument18 pagesAlternating Current (Ac) Electrical MachineLaw Boon Khang TennarasuNo ratings yet
- Tema1 - 4 - Otras Maquinas - 2020 - 21Document82 pagesTema1 - 4 - Otras Maquinas - 2020 - 21airtonNo ratings yet
- High Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerDocument16 pagesHigh Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerMohammed AltamimyNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Speed Control of BLDC Motor Using MicrocontrollerDocument16 pagesSpeed Control of BLDC Motor Using MicrocontrollerVõ Đức HuyNo ratings yet
- Identification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIdentification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerJurgen CokuNo ratings yet
- Brushless DC Motor: Position Linear Control Simulation: July 2005Document7 pagesBrushless DC Motor: Position Linear Control Simulation: July 2005Sebas GomezNo ratings yet
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocument8 pagesField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Advances in Modelling and Analysis B: Received: 27 May 2021 Accepted: 16 September 2021Document7 pagesAdvances in Modelling and Analysis B: Received: 27 May 2021 Accepted: 16 September 2021Wongsatorn PhongphaetsartNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- 5.0 DC Machines: Basic Electrical Engineering ELE 290Document20 pages5.0 DC Machines: Basic Electrical Engineering ELE 290Harizx SaufixNo ratings yet
- 6 11, Tesma103, IJEASTDocument6 pages6 11, Tesma103, IJEASTaditya317crazyNo ratings yet
- Speed Control of A Switched Reluctance Motor PDFDocument67 pagesSpeed Control of A Switched Reluctance Motor PDFrijilpoothadi50% (2)
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- DC Motor Modeling and Control Using Backstepping Technique p01 12Document12 pagesDC Motor Modeling and Control Using Backstepping Technique p01 12Ali AltahirNo ratings yet
- Motor and Motor ControlDocument126 pagesMotor and Motor ControlAhmed Farahat0% (1)
- Four Quadrant Speed Control of DC Motor Using ChopperDocument5 pagesFour Quadrant Speed Control of DC Motor Using ChopperismayilcNo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- Position Tracking System With Brushless DC Motor: Keywords: BLDC Motor Hall Sensors PID ControllerDocument5 pagesPosition Tracking System With Brushless DC Motor: Keywords: BLDC Motor Hall Sensors PID ControllerMyat AungNo ratings yet
- Paper 2002Document12 pagesPaper 2002Miguel VenzNo ratings yet
- Eee-233 R1Document14 pagesEee-233 R1ArifNo ratings yet
- Brushed DC Motor FundamentalsDocument10 pagesBrushed DC Motor Fundamentalsgeorgescribd1103No ratings yet
- Basic BLDC ControllerDocument9 pagesBasic BLDC ControllerRen KiyoshiiNo ratings yet
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocument4 pagesAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952No ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- 2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMDocument6 pages2014-Arwindra-Synthesis Modeling of 10 KW BLDC Controller Using PSIMKiki RamadhanNo ratings yet
- BLDC Sepic Motor Torque ControlDocument60 pagesBLDC Sepic Motor Torque ControlSuresh SsbnNo ratings yet
- Applsci 12 11096 With CoverDocument10 pagesApplsci 12 11096 With CoverMgWaiNo ratings yet
- Brushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesDocument21 pagesBrushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesSRL MECHNo ratings yet
- Modelling and Control of BLDC MotorDocument39 pagesModelling and Control of BLDC Motoritstutan_749916692No ratings yet
- Performance Analysis of BLDC Motor Using Basic Switching ConvertersDocument4 pagesPerformance Analysis of BLDC Motor Using Basic Switching Converterscool coolNo ratings yet
- Position Compensation Method of BLDC Motor For Automotive ApplicationsDocument7 pagesPosition Compensation Method of BLDC Motor For Automotive ApplicationsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Jeas 1012 796Document8 pagesJeas 1012 796Victor FurmanNo ratings yet
- Lec # 26 Brushless DC MotorDocument12 pagesLec # 26 Brushless DC MotorBuriro HayatNo ratings yet
- BLDC Motor Construction & OperationDocument8 pagesBLDC Motor Construction & OperationgbksnNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Everything About BLDC MotorsDocument22 pagesEverything About BLDC MotorsNyn SoniNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Model Predictive Control for Doubly-Fed Induction Generators and Three-Phase Power ConvertersFrom EverandModel Predictive Control for Doubly-Fed Induction Generators and Three-Phase Power ConvertersNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- Heterojunction Bipolar Transistors for Circuit Design: Microwave Modeling and Parameter ExtractionFrom EverandHeterojunction Bipolar Transistors for Circuit Design: Microwave Modeling and Parameter ExtractionNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Power Systems Modelling and Fault Analysis: Theory and PracticeFrom EverandPower Systems Modelling and Fault Analysis: Theory and PracticeRating: 2 out of 5 stars2/5 (1)
- Create Your Own Target Board: Edsim51ShDocument3 pagesCreate Your Own Target Board: Edsim51ShJanet WaldeNo ratings yet
- Brilliance SPECS and CONFIGDocument23 pagesBrilliance SPECS and CONFIGJanet Walde100% (1)
- Stitch and Measure: CanonDocument18 pagesStitch and Measure: CanonJanet WaldeNo ratings yet
- About The Simulator: James RogersDocument3 pagesAbout The Simulator: James RogersJanet WaldeNo ratings yet
- WWW Edsim51 Com InstallationInstructions HTMLDocument4 pagesWWW Edsim51 Com InstallationInstructions HTMLJanet WaldeNo ratings yet
- WWW Edsim51 Com Siminstructions HTMLDocument36 pagesWWW Edsim51 Com Siminstructions HTMLJanet WaldeNo ratings yet
- ASEM-51 Step-By-Step Installation On Windows XP: Application Note 0003 Rev. A March 17, 2013Document5 pagesASEM-51 Step-By-Step Installation On Windows XP: Application Note 0003 Rev. A March 17, 2013Janet WaldeNo ratings yet
- 8-bit microcontroller architectural overviewDocument18 pages8-bit microcontroller architectural overviewsyedfahimakhtarNo ratings yet
- WWW Viara Eu en Jmce Readme Htm#OVERVIEWDocument6 pagesWWW Viara Eu en Jmce Readme Htm#OVERVIEWJanet WaldeNo ratings yet
- Manual Mcu8051ide PDFDocument110 pagesManual Mcu8051ide PDFWojciech BłądekNo ratings yet
- WWW Edsim51 Com InstallationInstructions HTMLDocument4 pagesWWW Edsim51 Com InstallationInstructions HTMLJanet WaldeNo ratings yet
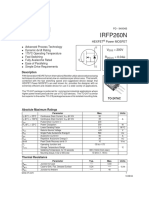
- Irfp260n PDFDocument9 pagesIrfp260n PDFRida DTNo ratings yet
- Create Your Own Target Board: Edsim51ShDocument3 pagesCreate Your Own Target Board: Edsim51ShJanet WaldeNo ratings yet
- III.2 Batch File Operation Under MS-DOSDocument2 pagesIII.2 Batch File Operation Under MS-DOSJanet WaldeNo ratings yet
- V7.0 CCR Console ManualDocument101 pagesV7.0 CCR Console ManualJanet WaldeNo ratings yet
- DatasheetDocument24 pagesDatasheetsorinnmhNo ratings yet
- UD150L-40E/40F/45E/45F XUD150L-40F D150LC-40E/40F/45E/45F GSC-2002S D150BC-41/VC-41/LC-41 GSC-2002S Software Release NoticeDocument47 pagesUD150L-40E/40F/45E/45F XUD150L-40F D150LC-40E/40F/45E/45F GSC-2002S D150BC-41/VC-41/LC-41 GSC-2002S Software Release NoticeJanet Walde100% (1)
- Transformer Less Power Supplies Resistive and CapacitiveDocument14 pagesTransformer Less Power Supplies Resistive and Capacitivechatmar-thailand-3038No ratings yet
- CS-2/CS-2000 Production Manual: Regius ConsoleDocument32 pagesCS-2/CS-2000 Production Manual: Regius ConsoleJanet WaldeNo ratings yet
- H11D1/ H11D2/ H11D3/ H11D4: Optocoupler, Phototransistor Output, With Base Connection, High BV VoltageDocument8 pagesH11D1/ H11D2/ H11D3/ H11D4: Optocoupler, Phototransistor Output, With Base Connection, High BV VoltageCristiano BruschiniNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- DatasheetDocument24 pagesDatasheetsorinnmhNo ratings yet
- TI309-0001 - Remedy For M58 Not Being Turned ON by DP873with PW ControlDocument4 pagesTI309-0001 - Remedy For M58 Not Being Turned ON by DP873with PW ControlJanet WaldeNo ratings yet
- XR2206Document16 pagesXR2206Himma FirdausNo ratings yet
- XR2206Document16 pagesXR2206Himma FirdausNo ratings yet
- Irfp260n PDFDocument9 pagesIrfp260n PDFRida DTNo ratings yet
- The Infinity Motor GeneratorDocument4 pagesThe Infinity Motor Generatoromar_rodriguez_94100% (1)
- The Infinity Motor GeneratorDocument4 pagesThe Infinity Motor Generatoromar_rodriguez_94100% (1)
- THIEFDocument1 pageTHIEFJanet WaldeNo ratings yet
- The Reeds Motor by Nelson Camus Test ReportsDocument11 pagesThe Reeds Motor by Nelson Camus Test ReportsGc FgNo ratings yet
- PIEAS M.S 2014 Questions - V2.1 - M. SarwarDocument12 pagesPIEAS M.S 2014 Questions - V2.1 - M. SarwarEngr IjazNo ratings yet
- 1 6 Trigonometric Functions 1Document24 pages1 6 Trigonometric Functions 111No ratings yet
- Technical Help: Ecodial Advance Calculation 4.2Document44 pagesTechnical Help: Ecodial Advance Calculation 4.2mumi87No ratings yet
- Cigre 496Document36 pagesCigre 496Dayanand Sharma100% (1)
- TG-Op1 Enunciados v01Document53 pagesTG-Op1 Enunciados v01VlmScarletQcaritaNo ratings yet
- EEE Notes Unit 3 Conventional Energy Resources PDFDocument8 pagesEEE Notes Unit 3 Conventional Energy Resources PDFAyush NandurkarNo ratings yet
- IEC 61439-1 TestDocument2 pagesIEC 61439-1 TestRey-an A. MorenoNo ratings yet
- A Comprehensive Text Book of Applied PhysicsDocument259 pagesA Comprehensive Text Book of Applied PhysicsSilvio Luiz Rutz Da Silva50% (2)
- Audio: Measurement of Audio VolumeDocument4 pagesAudio: Measurement of Audio VolumeJoão SiqueiraNo ratings yet
- Control Gear Price ListDocument15 pagesControl Gear Price ListShubham GuptaNo ratings yet
- FTS - 11 (Code-A) - 24-04-2020 PDFDocument16 pagesFTS - 11 (Code-A) - 24-04-2020 PDFkavyareddyNo ratings yet
- AnsaldoEnergia SYNCHRONOUSCONDENSERS 20220622Document6 pagesAnsaldoEnergia SYNCHRONOUSCONDENSERS 20220622rotimi olalekan fataiNo ratings yet
- Energy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)Document194 pagesEnergy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)mylaptop VJethoseNo ratings yet
- February 14 Homework Solutions: Mechanical Engineering 375 Heat TransferDocument5 pagesFebruary 14 Homework Solutions: Mechanical Engineering 375 Heat TransferYuvaperiyasamy MayilsamyNo ratings yet
- KV-300 IiDocument2 pagesKV-300 IiAndy WangNo ratings yet
- Motion of Charged Particles in Magnetic Fields and ApplicationsDocument21 pagesMotion of Charged Particles in Magnetic Fields and ApplicationsMircea PanteaNo ratings yet
- HybridDocument4 pagesHybridVignesh AsokNo ratings yet
- VCP-W Vacuum Circuit Breakers (5/15 KV) : Price List PL01301006E1Document40 pagesVCP-W Vacuum Circuit Breakers (5/15 KV) : Price List PL01301006E1vanhalenfernando123100% (1)
- 4 Kinematics of Rectilinear Motion (M)Document8 pages4 Kinematics of Rectilinear Motion (M)Fareed HusseinNo ratings yet
- Chapter 5. Upthrust in Fluids, Archimedes' Principle and FloatationDocument30 pagesChapter 5. Upthrust in Fluids, Archimedes' Principle and FloatationRabindra DashNo ratings yet
- Effects of Lightning Impulse On Power TransformerDocument4 pagesEffects of Lightning Impulse On Power TransformerSomchai HomklinkaewNo ratings yet
- IC - FAN480X PFC - PWM Combination ControllerDocument19 pagesIC - FAN480X PFC - PWM Combination Controllerkumaran RNo ratings yet
- Boardworks A2 Physics Contents Guide Boa PDFDocument21 pagesBoardworks A2 Physics Contents Guide Boa PDFshahbaz manzoorNo ratings yet
- Bu1508dx PDFDocument3 pagesBu1508dx PDFAlexis GonzálezNo ratings yet
- Distance Protection Examples PDFDocument7 pagesDistance Protection Examples PDFMonther Al-kalbaniNo ratings yet
- Sir Aurangzeb Alamgir's: Physics-X 2017 (PRACTICE Questions) By: SIRAURANGZEBALAMGIRDocument2 pagesSir Aurangzeb Alamgir's: Physics-X 2017 (PRACTICE Questions) By: SIRAURANGZEBALAMGIRusamaali12No ratings yet
- 3-Phase Diesel Marine Generator Set Ratings and SpecsDocument4 pages3-Phase Diesel Marine Generator Set Ratings and SpecsBrillyanNo ratings yet
- Data Acquisition To Analyze The Driver and His Race CarDocument188 pagesData Acquisition To Analyze The Driver and His Race CarKelvin NyeNo ratings yet
- Evaluation of Gas Release Rate Through Holes in Pipelines: Dong Yuhua, Gao Huilin, Zhou Jing'en, Feng YaorongDocument6 pagesEvaluation of Gas Release Rate Through Holes in Pipelines: Dong Yuhua, Gao Huilin, Zhou Jing'en, Feng YaorongTrung Duc TranNo ratings yet
- Optimization of Refrigeration Machinery : Giiran WallDocument5 pagesOptimization of Refrigeration Machinery : Giiran Wallคงเดช คํานึกNo ratings yet