You might also like
- Electronic Control Modules PDFDocument304 pagesElectronic Control Modules PDFJirka MescalNo ratings yet
- Verifications and Validations in Finite Element Analysis (FEA)Document23 pagesVerifications and Validations in Finite Element Analysis (FEA)raasisNo ratings yet
- Action Recognition From Video UsingDocument16 pagesAction Recognition From Video UsingManju YcNo ratings yet
- Installation Manual: Trailer Edition Precedent™ C-600, C-600M, S-600, S-700, S-600M and S-610M/DEDocument80 pagesInstallation Manual: Trailer Edition Precedent™ C-600, C-600M, S-600, S-700, S-600M and S-610M/DEasinghanandNo ratings yet
- MOMS With Events: Multi-Object Motion Segmentation With Monocular Event CamerasDocument15 pagesMOMS With Events: Multi-Object Motion Segmentation With Monocular Event CamerasSergio Marcelino Trejo FuentesNo ratings yet
- Detecting Pedestrians Using Patterns of Motion and AppearanceDocument8 pagesDetecting Pedestrians Using Patterns of Motion and Appearancemuhammad Ehsan UllahNo ratings yet
- Naeem2013 PDFDocument6 pagesNaeem2013 PDFImran BashaNo ratings yet
- Motion Detection and Tracking of Multiple Objects For Intelligent SurveillanceDocument7 pagesMotion Detection and Tracking of Multiple Objects For Intelligent Surveillancesemselvan794694No ratings yet
- Human Fall Detection Using Optical Flow Farne Back PptDocument15 pagesHuman Fall Detection Using Optical Flow Farne Back Pptkandulaanusha20No ratings yet
- Event Detection and Analysis from Video StreamsDocument17 pagesEvent Detection and Analysis from Video StreamsadddataNo ratings yet
- Detection and Tracking of Moving Objects From Overlapping EO and IR SensorsDocument6 pagesDetection and Tracking of Moving Objects From Overlapping EO and IR SensorsG.s. VishwanthNo ratings yet
- Moving Object Tracking Based On Mobile Robot Vision: JL JL JL JL JLDocument6 pagesMoving Object Tracking Based On Mobile Robot Vision: JL JL JL JL JLaliNo ratings yet
- International Conference on Computational Techniques and Artificial Intelligence (ICCTAI'2011Document5 pagesInternational Conference on Computational Techniques and Artificial Intelligence (ICCTAI'2011Mai Mập MạpNo ratings yet
- Real Time Object Detection and Tracking Using MATLABDocument8 pagesReal Time Object Detection and Tracking Using MATLABHarshal PatilNo ratings yet
- Decomposition Iccv11Document8 pagesDecomposition Iccv11Sayan RakshitNo ratings yet
- Council For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesDocument6 pagesCouncil For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesmelakuNo ratings yet
- Chen 2013Document7 pagesChen 2013Moaz AhmedNo ratings yet
- Real-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerDocument18 pagesReal-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerJonathan Neira GonzalezNo ratings yet
- Chiu, Tsai - 2011 - Movingmotionless Foreground Object Detection Using Fast Statistical Background UpdatingDocument16 pagesChiu, Tsai - 2011 - Movingmotionless Foreground Object Detection Using Fast Statistical Background UpdatingJose Edson Moreno JuniorNo ratings yet
- CNNTracking TNN10 HumanDocument14 pagesCNNTracking TNN10 HumanMukul AggarwalNo ratings yet
- Video Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingDocument12 pagesVideo Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingCS & ITNo ratings yet
- Implementation of Human Tracking Using Back Propagation AlgorithmDocument4 pagesImplementation of Human Tracking Using Back Propagation Algorithmpurushothaman sinivasanNo ratings yet
- Moving Object DetectionDocument14 pagesMoving Object DetectionAmith Ram Reddy100% (1)
- Real-time night object detectionDocument13 pagesReal-time night object detectionSonia R. BaldárragoNo ratings yet
- Computer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar AgarwalDocument6 pagesComputer Vision Based Moving Object Detection and Tracking: Suresh Kumar, Prof. Yatin Kumar Agarwalikhwancules46No ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Ijert Ijert: Moving Object Detection and Velocity Estimation Using MatlabDocument4 pagesIjert Ijert: Moving Object Detection and Velocity Estimation Using MatlabHalit YılNo ratings yet
- Motion Object Detection Using BGS TechniqueDocument4 pagesMotion Object Detection Using BGS TechniqueiirNo ratings yet
- Log Eucledian Covariance MatrixDocument8 pagesLog Eucledian Covariance MatrixNina MouhoubNo ratings yet
- Detection of Human Motion: Adopting Machine and Deep LearningDocument8 pagesDetection of Human Motion: Adopting Machine and Deep LearningPavithra iyerNo ratings yet
- 2012 IRIS (Laser)Document8 pages2012 IRIS (Laser)paperopenaccessNo ratings yet
- Objects Detection and Extraction in Video Sequences Captured by A Mobile CameraDocument7 pagesObjects Detection and Extraction in Video Sequences Captured by A Mobile Cameraanil kasotNo ratings yet
- Active Camera Tracking Using Affine Motion CompensationDocument9 pagesActive Camera Tracking Using Affine Motion CompensationAchraf El aouameNo ratings yet
- Kols CH Turk 2004 Robust Hand DetectionDocument6 pagesKols CH Turk 2004 Robust Hand DetectionMuntianu CristianNo ratings yet
- Application of The Composite Materials in IndustriesDocument11 pagesApplication of The Composite Materials in Industrieschethugowda7No ratings yet
- Bastian Leibe, Konrad Schindler, Nico Cornelis, and Luc Van GoolDocument14 pagesBastian Leibe, Konrad Schindler, Nico Cornelis, and Luc Van Goolyangyin7138No ratings yet
- File 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationDocument12 pagesFile 1667643029 110340 2001-MarkerlessMotionCaptureofComplexFull-BodyMovementforCharacterAnimationdevansh gargNo ratings yet
- Object TrackingDocument23 pagesObject TrackingRahul PaulNo ratings yet
- A Review On Human Behavior Recognition Algorithms in Video Surveillance SystemsDocument8 pagesA Review On Human Behavior Recognition Algorithms in Video Surveillance SystemslambanaveenNo ratings yet
- Moving Object Detection For Real-Time ApplicationsDocument6 pagesMoving Object Detection For Real-Time ApplicationsSaeideh OraeiNo ratings yet
- 1-s2.0-S2405844023093647-mainDocument19 pages1-s2.0-S2405844023093647-mainAbdullah AbdullahNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- Optical Flow Based Mobile Robot NavigationDocument6 pagesOptical Flow Based Mobile Robot Navigationmiguecord100% (1)
- (X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Document10 pages(X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Hira RasabNo ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- An Empiral Study and Discussions On Multiple Object Tracking: Current State of ArtDocument4 pagesAn Empiral Study and Discussions On Multiple Object Tracking: Current State of ArtEditor IJRITCCNo ratings yet
- Bioimaging 2020 39 CR PDFDocument4 pagesBioimaging 2020 39 CR PDFAdrian Alin BarglazanNo ratings yet
- Exploring Representation Learning With CNNsDocument8 pagesExploring Representation Learning With CNNsItem SongsNo ratings yet
- Smart CardsDocument39 pagesSmart CardsNandu ShriNo ratings yet
- Moving Object Tracking and Detection in Videos Using MATLAB: A ReviewDocument9 pagesMoving Object Tracking and Detection in Videos Using MATLAB: A ReviewAkhirul HajriNo ratings yet
- Object Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformDocument9 pagesObject Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformJesycaFuenmayorNo ratings yet
- (IJCST-V10I5P17) :DR K Sailaja, P Hari PrasadDocument7 pages(IJCST-V10I5P17) :DR K Sailaja, P Hari PrasadEighthSenseGroupNo ratings yet
- 1207 6774 PDFDocument14 pages1207 6774 PDFLee DestructeurNo ratings yet
- Motion Estimation For Moving Target DetectionDocument9 pagesMotion Estimation For Moving Target DetectionSatyam ShandilyaNo ratings yet
- Object Detection and Trackinfg in Videos: N. RasathiDocument8 pagesObject Detection and Trackinfg in Videos: N. RasathiIJITJournalsNo ratings yet
- Detection and Motion Estimation of Moving Objects Based On 3D-WarpingDocument6 pagesDetection and Motion Estimation of Moving Objects Based On 3D-WarpingUmair KhanNo ratings yet
- 2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsDocument5 pages2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsM FarhanNo ratings yet
- Monocular Human Motion Tracking by Using DE-MC Particle FilterDocument14 pagesMonocular Human Motion Tracking by Using DE-MC Particle FilterDavid Augusto RibeiroNo ratings yet
- Vision Based Moving Object Detection and TrackingDocument6 pagesVision Based Moving Object Detection and Trackingyaregal limenihNo ratings yet
- Auro 2017Document16 pagesAuro 2017chowkamlee81No ratings yet
- Vehicl ManagementDocument12 pagesVehicl ManagementkaveeshaNo ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- Sugercane Cop 2012-13Document1 pageSugercane Cop 2012-13Ximena SalomeNo ratings yet
- Zhuang Miao, Shan Zou, Yang Li, Xiancai Zhang, Jiabao Wang, Ming HeDocument4 pagesZhuang Miao, Shan Zou, Yang Li, Xiancai Zhang, Jiabao Wang, Ming HeClear MindNo ratings yet
- Vehicle Detection in Aerial Surveillance Using Dynamic Bayesian NetworksDocument8 pagesVehicle Detection in Aerial Surveillance Using Dynamic Bayesian NetworksClear MindNo ratings yet
- Global Motion Assisted Low Complexity Video Encoding For UAV ApplicationsDocument12 pagesGlobal Motion Assisted Low Complexity Video Encoding For UAV ApplicationsClear MindNo ratings yet
- Drone Rangers: SustainabilityDocument2 pagesDrone Rangers: SustainabilityClear MindNo ratings yet
- Sugercane Cop 2012-13Document1 pageSugercane Cop 2012-13Ximena SalomeNo ratings yet
- Sugercane Cop 2012-13Document1 pageSugercane Cop 2012-13Ximena SalomeNo ratings yet
- Sugercane Cop 2012-13Document1 pageSugercane Cop 2012-13Ximena SalomeNo ratings yet
- (Approved) : Preparatory Tillage 1Document1 page(Approved) : Preparatory Tillage 1Clear MindNo ratings yet
- 2018-19 BasmatiDocument1 page2018-19 BasmatiClear MindNo ratings yet
- 2018-19 Potato PDFDocument1 page2018-19 Potato PDFShafiqueNo ratings yet
- Sugercane Cop 2012-13Document1 pageSugercane Cop 2012-13Ximena SalomeNo ratings yet
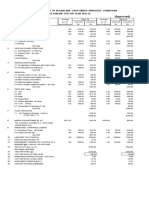
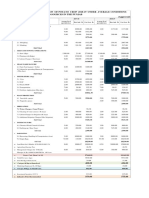
- In The Punjab For The Year 2018-19: Cost of Production of Irri (Paddy) Crop Estimate Under Average ConditionsDocument1 pageIn The Punjab For The Year 2018-19: Cost of Production of Irri (Paddy) Crop Estimate Under Average ConditionsClear MindNo ratings yet
- Vegetables Growing Calendar in Pakistan - Multan FarmsDocument4 pagesVegetables Growing Calendar in Pakistan - Multan FarmsClear Mind67% (3)
- 6-Mapping Crop Type Using Hyperspectral and Multispectral DatasetsDocument35 pages6-Mapping Crop Type Using Hyperspectral and Multispectral DatasetsClear MindNo ratings yet
- Computer Systems, Maintainance and Repair Practical 01Document2 pagesComputer Systems, Maintainance and Repair Practical 01ICONIC ENTNo ratings yet
- Firewalld Iptables (Continued)Document36 pagesFirewalld Iptables (Continued)Alex ValenciaNo ratings yet
- Learning PHP, Part 1Document35 pagesLearning PHP, Part 1PauloNo ratings yet
- Module MakingDocument39 pagesModule MakingDarrel FadrillanNo ratings yet
- Informatica Investor Presentation October 2021Document52 pagesInformatica Investor Presentation October 2021Praveen LankapothuNo ratings yet
- Chapter 1Document47 pagesChapter 1TERRIUS AceNo ratings yet
- Introduction To MCDM Techniques: AHP As Example: August 2019Document42 pagesIntroduction To MCDM Techniques: AHP As Example: August 2019Ashish PattanaikNo ratings yet
- Assessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDocument5 pagesAssessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDwi PratiwiNo ratings yet
- الجزائر الإجتماعية في عهد الدولة الرستمية - د. محمد بوركبةDocument456 pagesالجزائر الإجتماعية في عهد الدولة الرستمية - د. محمد بوركبةKawther YaNo ratings yet
- OFI GST Functional Tax Computation For P2P Phase1Document73 pagesOFI GST Functional Tax Computation For P2P Phase1rajkumarNo ratings yet
- Maze Ransomware Attack Prevention GuideDocument7 pagesMaze Ransomware Attack Prevention GuideprakashrjsekarNo ratings yet
- Global Master's in Blockchain Technologies: Master's Degree by The IL3-Universitat de BarcelonaDocument4 pagesGlobal Master's in Blockchain Technologies: Master's Degree by The IL3-Universitat de BarcelonaAungsinghla MarmaNo ratings yet
- Pradeep Rawat (C.V.)Document11 pagesPradeep Rawat (C.V.)hotel the gloryNo ratings yet
- Salesforce Architect Academy EbookDocument16 pagesSalesforce Architect Academy EbookatifhassansiddiquiNo ratings yet
- Sismógrafo GEA24 - PASIDocument3 pagesSismógrafo GEA24 - PASIkevin arnold espinoza venturaNo ratings yet
- ICSE Class 10 Computer Applications Question Paper 2012Document4 pagesICSE Class 10 Computer Applications Question Paper 2012Lovish kumar STD.8ANo ratings yet
- Artificial Intelligence - Course OutlineDocument3 pagesArtificial Intelligence - Course Outlinehafiza javeriaNo ratings yet
- Urn Uvci 01 Ro W10dmyl82pkjp0o7ppoz6or37gev9x#2Document2 pagesUrn Uvci 01 Ro W10dmyl82pkjp0o7ppoz6or37gev9x#2Codrin CodrinNo ratings yet
- CS5760: Image alignment using least squaresDocument35 pagesCS5760: Image alignment using least squaresDUDEKULA VIDYASAGARNo ratings yet
- CipherTrust Manager - Hands-On - CTM Database Protection (CDP)Document25 pagesCipherTrust Manager - Hands-On - CTM Database Protection (CDP)bertinNo ratings yet
- Ury XX On 500 User Manual enDocument26 pagesUry XX On 500 User Manual enT KNo ratings yet
- 5eabcb225dabaBHEL Optimises Emphasis On Employee Engagement During The Lockdown Nearly 21,000 Employees Benefit Through Renewed Focus On E-LearningDocument1 page5eabcb225dabaBHEL Optimises Emphasis On Employee Engagement During The Lockdown Nearly 21,000 Employees Benefit Through Renewed Focus On E-LearningssinghNo ratings yet
- Cryptography and StagenographyDocument12 pagesCryptography and StagenographyMuskanNo ratings yet
- 10 11 Week14 Technology DecipheringcodesDocument21 pages10 11 Week14 Technology DecipheringcodesVipul KumarNo ratings yet
- RLFDocument5 pagesRLFPritam ModakNo ratings yet
- Comparative Analysis of Text Mining Techniques ForDocument12 pagesComparative Analysis of Text Mining Techniques ForChilaNo ratings yet
- IT REPORT OF A Cybersecurity StudentDocument35 pagesIT REPORT OF A Cybersecurity StudentJeff EnaefeNo ratings yet