You might also like
- Second Condition of EquilibriumDocument86 pagesSecond Condition of EquilibriumKimberly FloresNo ratings yet
- Rotational Dynamics: TorqueDocument4 pagesRotational Dynamics: TorqueNeil Kyle ManiquisNo ratings yet
- Phy1 11 - 12 Q2 0902 PF FD 1Document42 pagesPhy1 11 - 12 Q2 0902 PF FD 1ShinzyNo ratings yet
- Physics torque equilibrium conditionsDocument13 pagesPhysics torque equilibrium conditionsJohn Dale IbaleNo ratings yet
- The Ability of A Force To Rotate A Body About Some Axis.: TorqueDocument37 pagesThe Ability of A Force To Rotate A Body About Some Axis.: TorqueWendy RissmeyerNo ratings yet
- C2 - 5 Torque and Simple MachinesDocument45 pagesC2 - 5 Torque and Simple MachinesLionel MessiNo ratings yet
- Assignment/Internet Research in General Physics: Prepared By: Submitted ToDocument28 pagesAssignment/Internet Research in General Physics: Prepared By: Submitted TowyrmczarNo ratings yet
- Ssph011 Session 14 Work, Energy and PowerDocument74 pagesSsph011 Session 14 Work, Energy and PowerPortia NyakaneNo ratings yet
- Ssph011 Session 15 Biomechanic Moments (Torque) and ElasticityDocument55 pagesSsph011 Session 15 Biomechanic Moments (Torque) and ElasticityPortia NyakaneNo ratings yet
- PhysicsDocument162 pagesPhysicsRajat Anand100% (1)
- Chapter-8Document64 pagesChapter-8aungchanmyatpaingNo ratings yet
- Rot Motion NotesDocument63 pagesRot Motion NotesCherry OcampoNo ratings yet
- Engineering Mechanics Notes: Statics, Forces, Moments, and FrameworksDocument8 pagesEngineering Mechanics Notes: Statics, Forces, Moments, and FrameworksTourlêy MunroNo ratings yet
- Report Statics Group 5Document10 pagesReport Statics Group 5Amir IskandarNo ratings yet
- Physics RigidbodyrotationDocument76 pagesPhysics Rigidbodyrotationsvl3No ratings yet
- Equilibrium of a Uniform Rigid BodyDocument37 pagesEquilibrium of a Uniform Rigid BodyYu ErinNo ratings yet
- Physics 107 Homework Assignment #8: Cutnell & Johnson, 7 Edition Chapter 9: Problems 16, 22, 24, 60, 68Document5 pagesPhysics 107 Homework Assignment #8: Cutnell & Johnson, 7 Edition Chapter 9: Problems 16, 22, 24, 60, 68Jester JuarezNo ratings yet
- CH-10 Plane Motion of Rigid Bodies 2Document13 pagesCH-10 Plane Motion of Rigid Bodies 2Anshuman SinghNo ratings yet
- HW8.3 Equilibrium SOLNSDocument12 pagesHW8.3 Equilibrium SOLNSHrxNo ratings yet
- L-10 (M-9) Torque and Rotational Inertia: Rigid BodiesDocument22 pagesL-10 (M-9) Torque and Rotational Inertia: Rigid BodiessdfasdgNo ratings yet
- Conditions of EquilibriumDocument14 pagesConditions of EquilibriumNaeztin Bien AgustinNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- CHEE1034 7 Moments and Equilibrium 2020Document26 pagesCHEE1034 7 Moments and Equilibrium 2020Ze SpyNo ratings yet
- Chapter 9-Static EquilibriumDocument34 pagesChapter 9-Static EquilibriumGemechisNo ratings yet
- Chapter 5 - Uniform Circular MotionDocument17 pagesChapter 5 - Uniform Circular MotionJordan RamosNo ratings yet
- Torque and Angular MomentumDocument24 pagesTorque and Angular Momentum88No1FanNo ratings yet
- Rotational Motion Key ConceptsDocument1 pageRotational Motion Key ConceptsHEIDI ROSE MENDOZANo ratings yet
- Rotational Equilibrium and Rotational DynamicsDocument8 pagesRotational Equilibrium and Rotational DynamicsNathalie SerafinNo ratings yet
- Powerpoint PHY01 CO5Document51 pagesPowerpoint PHY01 CO5HURHURNo ratings yet
- Moments: Turning Effect of A ForceDocument21 pagesMoments: Turning Effect of A ForceAnki AccountNo ratings yet
- CH 10Document29 pagesCH 10Ardian20No ratings yet
- Rotation: Entering Rigid-Body DynamicsDocument6 pagesRotation: Entering Rigid-Body DynamicsPrakhar TiwariNo ratings yet
- CHAPTER 1 (Part 1.2) - WEEK 1Document25 pagesCHAPTER 1 (Part 1.2) - WEEK 1Nadhirah NizarNo ratings yet
- Beam Analysis PDFDocument26 pagesBeam Analysis PDFnurizzaatiNo ratings yet
- Turning Effect: Force Produces An Effect To Turn An Object Is Called Turning EffectDocument7 pagesTurning Effect: Force Produces An Effect To Turn An Object Is Called Turning EffectKNEWTON EducationNo ratings yet
- Torque 20231122 064055 0000Document16 pagesTorque 20231122 064055 0000pagalantecymeaNo ratings yet
- Torque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)Document52 pagesTorque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)vijay AmirtharajNo ratings yet
- Control Systems LabDocument6 pagesControl Systems LabMuhammad Junaid SialNo ratings yet
- Torque Prof Alsaad JUSTDocument17 pagesTorque Prof Alsaad JUSTabood kofahiNo ratings yet
- 8 01t Fall 2004 w05d3 Class 13Document8 pages8 01t Fall 2004 w05d3 Class 13Nishant SharmaNo ratings yet
- Chapter 1 - Rotational MotionDocument50 pagesChapter 1 - Rotational MotionSiti KhadijahNo ratings yet
- TorqueDocument3 pagesTorquerf08dNo ratings yet
- Experiment 12: Rotational Equilibrium: PurposeDocument6 pagesExperiment 12: Rotational Equilibrium: PurposeRakotoarison Louis FrederickNo ratings yet
- Chapter 8-: Rotational MotionDocument34 pagesChapter 8-: Rotational MotionSaadNo ratings yet
- Mechanics L7Document49 pagesMechanics L7Charlie LaiNo ratings yet
- Rotational Equilibrium and Rotational DynamicsDocument49 pagesRotational Equilibrium and Rotational Dynamicsmahsan abbasNo ratings yet
- Hydraulic RamDocument16 pagesHydraulic RamAbdul HameedNo ratings yet
- Bahan Ajar - Ptm117 Mekanika TeknikDocument141 pagesBahan Ajar - Ptm117 Mekanika Teknikariefz45100% (3)
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Manual ZaxisDocument424 pagesManual ZaxisTeresa Marina Peralta97% (67)
- Isuzu Giga Series Brochure Effmar14Document9 pagesIsuzu Giga Series Brochure Effmar14Burce MherjheNo ratings yet
- 2010 PathfinderDocument463 pages2010 PathfinderBurce MherjheNo ratings yet
- Rough Terrain Crane: 【 Specification】Document8 pagesRough Terrain Crane: 【 Specification】omni_partsNo ratings yet
- 06a 320D.AuxDocument19 pages06a 320D.AuxEnzo Miguel Sarabia Montes100% (3)
- Shop Manual PC200 8 (Ing)Document1,082 pagesShop Manual PC200 8 (Ing)John MkCito KI87% (158)
- ISUZU 4JG2 ENGINE SPECIFICATIONSDocument11 pagesISUZU 4JG2 ENGINE SPECIFICATIONSBurce MherjheNo ratings yet
- 2010 PathfinderDocument463 pages2010 PathfinderBurce MherjheNo ratings yet
- 1470062672160801MHiluxtechspec PDFDocument2 pages1470062672160801MHiluxtechspec PDFMinh LeNo ratings yet
- CH18-CH25, CH620-CH730, CH740, CH750 Service ManualDocument88 pagesCH18-CH25, CH620-CH730, CH740, CH750 Service ManualIvan CaicedoNo ratings yet
- 1470062672160801MHiluxtechspec PDFDocument2 pages1470062672160801MHiluxtechspec PDFMinh LeNo ratings yet
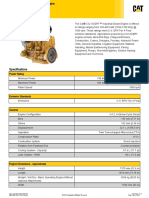
- C32acert Ind18 1200 PDFDocument5 pagesC32acert Ind18 1200 PDFmuhammad aliNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document9 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Diego Orlando Santos BuitragoNo ratings yet
- Catalog of CHP Technologies Section 2. Technology Characterization - Reciprocating Internal Combustion EnginesDocument29 pagesCatalog of CHP Technologies Section 2. Technology Characterization - Reciprocating Internal Combustion EnginesNathan MoralesNo ratings yet
- 160-03 e PDFDocument8 pages160-03 e PDFDuy KhaNo ratings yet
- Maintaining Diesel Engines For Reliable Operation: BackgroundDocument5 pagesMaintaining Diesel Engines For Reliable Operation: BackgroundBurce MherjheNo ratings yet
- Phy2048 ch11 PDFDocument7 pagesPhy2048 ch11 PDFHjgfd ItfrityfNo ratings yet
- Simatic Ident RFID Systems Spacer For MDS D124 / D324 / D424 and RF320TDocument3 pagesSimatic Ident RFID Systems Spacer For MDS D124 / D324 / D424 and RF320TBurce MherjheNo ratings yet
- SS15A3P ManualDocument6 pagesSS15A3P ManualBurce MherjheNo ratings yet
- Torque WORKSHEETS 2014Document3 pagesTorque WORKSHEETS 2014Burce MherjheNo ratings yet
- Database and Knowledge About Essential Manufacturers of Marine Self-Ignition EnginesDocument16 pagesDatabase and Knowledge About Essential Manufacturers of Marine Self-Ignition EnginesBurce MherjheNo ratings yet
- Rotation MI and TorqueDocument22 pagesRotation MI and TorqueAlaa MohyeldinNo ratings yet
- Class24+25 Torque+Rotation+Equilibrium PDFDocument4 pagesClass24+25 Torque+Rotation+Equilibrium PDFBurce MherjheNo ratings yet
- AVR1Document12 pagesAVR1Grid LockNo ratings yet
- A043y696 SX460 enDocument24 pagesA043y696 SX460 enAhmed KotbNo ratings yet
- 2005 2010 Quick Reference Guide PDFDocument79 pages2005 2010 Quick Reference Guide PDFJOSUE DURAN GRANDENo ratings yet
- Interpreting Electrical Diagrams (less than 40 charsDocument11 pagesInterpreting Electrical Diagrams (less than 40 charsRELOJERIANo ratings yet
- Exp 6 GyroscopeDocument25 pagesExp 6 GyroscopeBikash ChoudhuriNo ratings yet
- Planar Kinematics of A Rigid BodyDocument40 pagesPlanar Kinematics of A Rigid BodyZoker_45No ratings yet
- 013-13496A PS-2120A Experiment GuideDocument17 pages013-13496A PS-2120A Experiment GuideZeeshan HaiderNo ratings yet
- AP1 Rotational Motion Presenter W Answers PDFDocument34 pagesAP1 Rotational Motion Presenter W Answers PDFMisakiNo ratings yet
- 2.003 Engineering Dynamics Problem Set 5 - Solution Problem 1Document16 pages2.003 Engineering Dynamics Problem Set 5 - Solution Problem 1Sergio Bernal OrtegaNo ratings yet
- Ch08 Giancoli7e LectureOutlineDocument33 pagesCh08 Giancoli7e LectureOutlineMuhammad Firman PriatnaNo ratings yet
- Rigid Bodies: 2.1 Many-Body SystemsDocument17 pagesRigid Bodies: 2.1 Many-Body SystemsRyan TraversNo ratings yet
- Angular MomentumDocument12 pagesAngular Momentumblowmeasshole1911No ratings yet
- AMC Experiment 6 (Momeint of Inertia of Flywheel) Ketan PatilDocument5 pagesAMC Experiment 6 (Momeint of Inertia of Flywheel) Ketan PatilSpideruto KpNo ratings yet
- Gyroscope Design For Turning The MonowheelDocument13 pagesGyroscope Design For Turning The MonowheelAman DesaiNo ratings yet
- Introduction To ROBOTICS: Robot Kinematics IIDocument46 pagesIntroduction To ROBOTICS: Robot Kinematics IIsureshbtNo ratings yet
- Physics MCQDocument12 pagesPhysics MCQAshish ShresthaNo ratings yet
- ZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankDocument84 pagesZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankRaj PatelNo ratings yet
- Module Exercise 3 - RotationDocument5 pagesModule Exercise 3 - RotationKrishna PrintsNo ratings yet
- Kinematic ch3 Solution (John J. Uicker)Document85 pagesKinematic ch3 Solution (John J. Uicker)박종국No ratings yet
- Centripetal Force LabDocument18 pagesCentripetal Force LabAizat Abdul RazakNo ratings yet
- Kinematics of Rigid Bodies1Document109 pagesKinematics of Rigid Bodies1Clackfuik12No ratings yet
- Translation and RotationDocument16 pagesTranslation and RotationgboneteNo ratings yet
- Circular Motion - Module 4Document8 pagesCircular Motion - Module 4lolzNo ratings yet
- Chapter 12【Angular Momentum and Statics】Document28 pagesChapter 12【Angular Momentum and Statics】陳慶銘No ratings yet
- MIT16 07F09 Lec26Document13 pagesMIT16 07F09 Lec26stelandreouNo ratings yet
- Problems in Complex Variable TheoryDocument300 pagesProblems in Complex Variable TheoryfelipeplatziNo ratings yet
- Angular Displacement and Linear Displacement Problems and Solutions PDFDocument1 pageAngular Displacement and Linear Displacement Problems and Solutions PDFBasic PhysicsNo ratings yet
- Formulas For Uniform Circular MotionDocument6 pagesFormulas For Uniform Circular Motionفديت الحلوينNo ratings yet
- Computer Graphics Lab Manual For IV CSEDocument67 pagesComputer Graphics Lab Manual For IV CSEGopal RamNo ratings yet
- Rotational Motion QuestionsDocument32 pagesRotational Motion QuestionsKushalMishraNo ratings yet
- 14 - Rotation of Rigid BodiesDocument25 pages14 - Rotation of Rigid BodiesKeith SmithNo ratings yet
- Circular MotionDocument8 pagesCircular MotionGreg Eleftheriou0% (1)
- Msa Lab ManualDocument16 pagesMsa Lab ManualAcchyutjhNo ratings yet
- CH 12 TextDocument20 pagesCH 12 TextIshu VohraNo ratings yet